Лекции по Информационно-измерительным системам. Основные определения. Области применения иис, Л. 1, глава 1, с. 6
 Скачать 2.88 Mb. Скачать 2.88 Mb.
|

Таблица 2.3. Классификация принципов построения ИИС
Выполнение последовательно или параллельно операций получения информации во многом определяет количество элементов системы, быстродействие, надежность и т. п. Измерительная информационная система может состоять из частей, в которых последовательность операций получения или преобразования информации может быть различной. Естественно, в системе для перехода от параллельного к последовательному выполнению преобразований информации и наоборот должны использоваться соответствующие согласующие устройства. Использование пригодных для совместной работы функциональных блоков агрегатных комплексов ГСП и стандартных цифровых интерфейсов существенно определяет многие характеристики ИИС. Более подробно это рассматривается в гл. 3 и 5. Наличие в составе программно-управляемых цифровых вычислительных средств (микропроцессоров, малых ЭВМ и т. п.) является очень важным классификационным признаком. Система, содержащая такие средства, обладает определенной универсальностью, так как при соответствующем программном обеспечении может (при ограниченном быстродействии) выполнять функции систем различного назначения. Измерительные информационные системы, содержащие такие вычислительные средства, называют измерительно-вычислительными системами (ИВС), а ИВС, создаваемые потребителями из стандартных устройств для решения локальных экспериментальных задач — локальными; ИВС (ЛИВС). В ИВС можно выделить универсальное ядро, в которое входят часть аналоговых преобразователей (например, коммутаторы), аналого-цифровые преобразователи, часть цифровых преобразователей (цифровые коммутаторы и устройства памяти), ЭВМ, набор устройств отображения и регистрации информации, средства интерфейса и устройства, формирующие воздействия на исследуемый объект. Это ядро цифровых ИИС получило название измерительно-вычислительных комплексов (ИВК). Измерительно-вычислительные системы при известных условиях могут создаваться на базе управляющих вычислительных машин (УВМ) и комплексов (УВК), имеющих в своем составе ЭВМ. В некоторых частных случаях (например, при измерении электрических величин) технические средства ИВС и ИВК могут совпадать, а отличие между ними будет заключаться лишь в программном обеспечении. Наличие контура обратной информационной связи позволяет организовать компенсационные методы измерения, позволяющие получить более высокие точностные характеристики. Изменение скоростей получения и выдачи информации в ИИС возможно главным образом при использовании запоминающих устройств (ЗУ). Оно может быть, например, применено для быстрого запоминания значений исследуемых величин и медленной выдачи информации и наоборот. Введение адаптации ИИС к исследуемым величинам, структурной и информационной избыточности в целях повышения надежности, помехоустойчивости, точности, гибкости работы и т. п. типично для системотехники. Можно предполагать, что дальнейшее развитие ИИС во многом будет зависеть от решения этих вопросов. ЭЛЕКТРОИЗМЕРИТЕЛЬНЫЕ ЦЕПИ ИИС. Виды модуляции сигналов в ИИС, [Л.8, с.213-216]. Многоканальные системы, мультиплексирование,[Л.2, с.217-220]. Существуют два основных подхода к обработке более чем одного аналогового сигнала. Долгое время наиболее популярным был способ аналогового мультиплексирования всех входных каналов с использованием одного АЦП для выполнения преобразований. Одной из причин популярности этого способа являлась высокая стоимость АЦП. В альтернативном подходе используются отдельные АЦП для каждого канала. Этот способ имеет некоторые преимущества, и он становится все более привлекательным для практической реализации в связи с уменьшением стоимости АЦП. Аналоговое мультиплексирование. На рис. 5.13 показана наиболее часто используемая конфигурация системы сбора данных с аналоговым мультиплексированием каналов. По команде мультиплексор соединяет выбранный канал в УВХ, которое делает выборку и затем хранит ее для преобразования в АЦП. Заметим, что УВХ позволяет мультиплексору при необходимости переключиться на другой канал, в то время как АЦП еще выполняет преобразование. Это означает, что время переключения мультиплексора и его время установления не влияют на производительность системы. Одной из модификаций этой конфигурации является система одновременной выборки. УВХ устанавливаются на входах мультиплексора и запускаются по одной и той же команде SAMPLE. Это позволяет получить отсчеты значений двух или большего числа сигналов точно в один и тот же момент времени, что иногда требуется для некоторых систем управления и обработки сигналов. 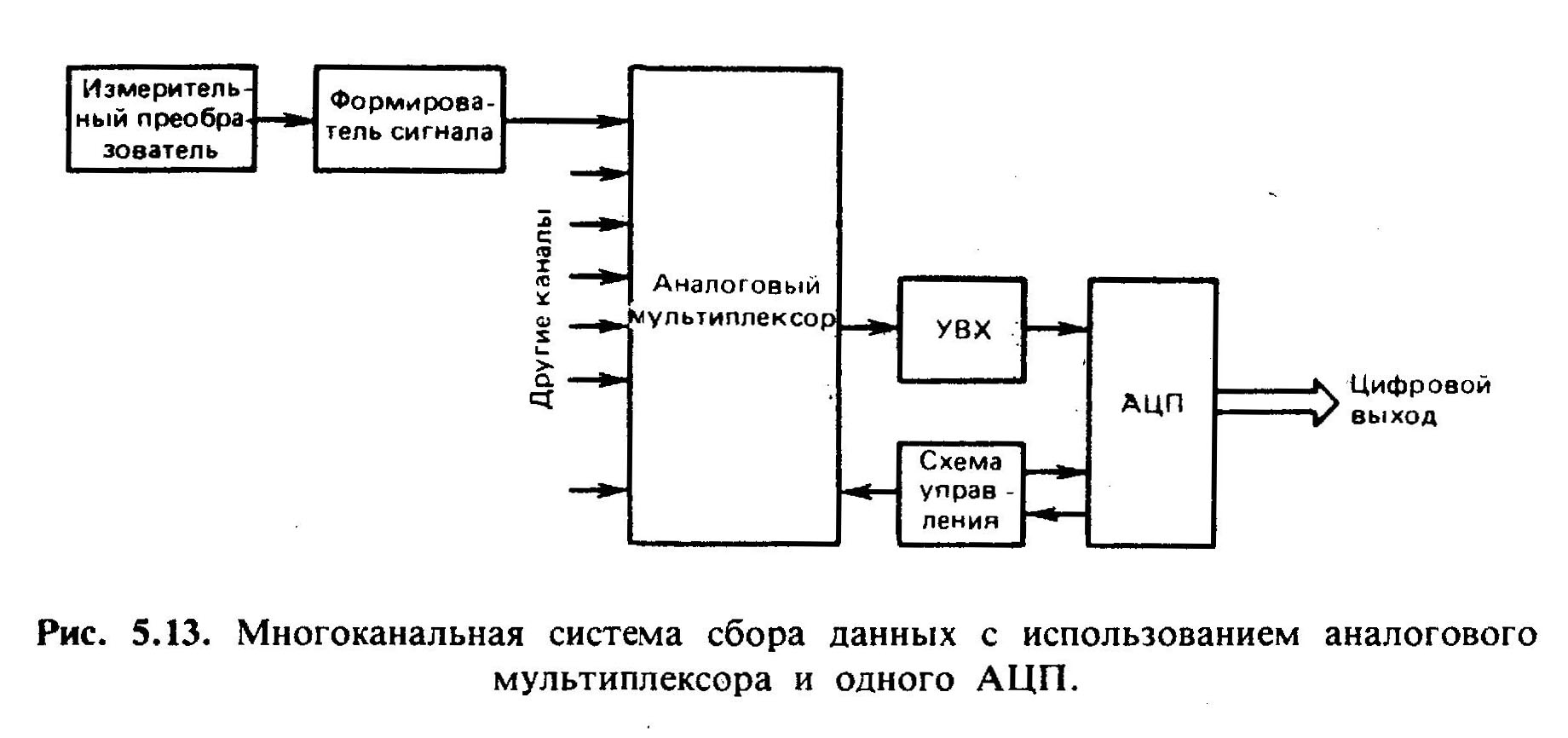 В аналоговых мультиплексорах чаще всего используются полу проводниковые ключи (на полевых транзисторах с управляемым pn-переходом и КМОП-транзисторах). Матрица управляемых ключей изготавливается в виде монолитной ИС, которая, как правило, содержит и дешифратор, позволяющий использовать лишь несколько управляющих линий для выбора любого сигнального канала. Широкое распространение получили мультиплексоры на 4, 8 и 16 каналов, допускающие работу с заземленными или дифференциальными входными сигналами. Мультиплексор должен сначала отключать текущий коммутируемый вход и только затем подключать следующий, чтобы гарантировать отсутствие короткого замыкания двух входных линий. Другими важными рабочими характеристиками аналогового мультиплексора являются сопротивление его ключей в открытом состоянии, токи утечки ключей в закрытом состоянии, точность коэффициента передачи, перекрестные помехи и время установления. На сопротивлении открытого ключа входной сигнал создает некоторое падение напряжения, приводящее к погрешности коэффициента передачи. Эту погрешность можно минимизировать, нагружая мультиплексор схемой с большим входным сопротивлением. В частности, уменьшению погрешности коэффициента передачи способствует высокое входное сопротивление подключаемого к выходу мультиплексора УВХ. Точность коэффициента передачи — это выраженная в процентах погрешность передачи входного сигнала на выход мультиплексора. Перекрестные помехи возникают в результате паразитной связи между выходом мультиплексора и входом закрытого ключа. Время установления — это время, необходимое для того, чтобы значение выходного сигнала мультиплексора оказалось и в дальнейшем оставалось внутри некоторого установленного диапазона значений вблизи уровня подключаемого входного сигнала. Разработчик должен знать величину этого параметра, чтобы запускать УВХ только после указанной стабилизации уровня выходного сигнала мультиплексора. Параллельное преобразование. При параллельном способе сбора данных для каждого канала используется отдельный АЦП (рис. 5.14). Преимущества такого подхода проявляются в промышленных системах сбора данных, когда измерительные преобразователи распределены по большой площади и, как правило, работают в условиях сильных внешних помех. Установка АЦП вблизи измерительных преобразователей и передача преобразованных данных в цифровой форме предотвращают прохождение аналоговых сигналов через области действия помех. При таком подходе обеспечивается также гальваническая развязка и исключается появление земляных контуров (принципы реализации интерфейса для таких систем обсуждались в разд. 5.3). 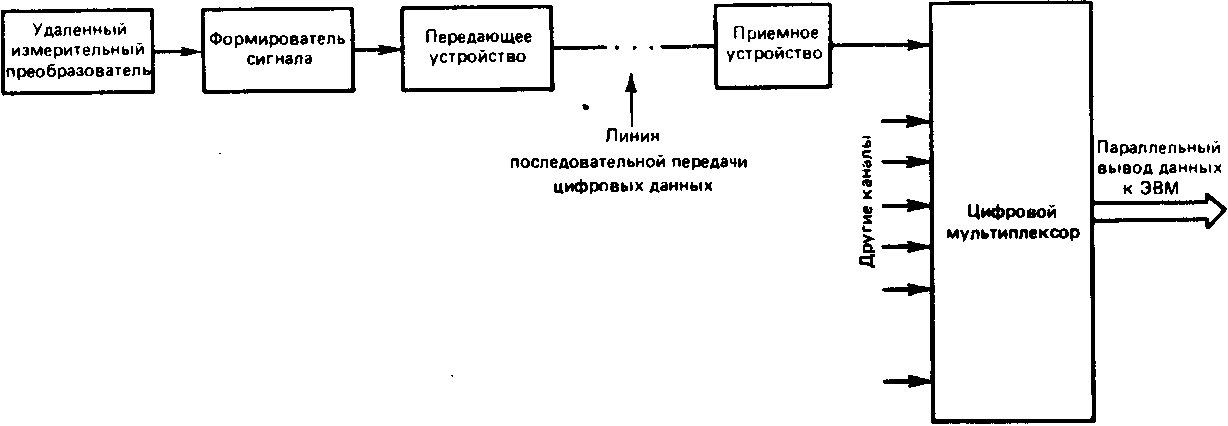 Рис. 5.14. Многоканальная система сбора данных с использованием отдельных АЦП для каждого канала и цифрового мультиплексора. Наличие отдельного АЦП для каждого канала позволяет реализовать намного большую частоту дискретизации в расчете на канал. И наоборот — для реализации заданной производительности можно использовать менее быстродействующие АЦП. (дополнительный материал: ЛР №5 ”ИИС на примере контроллера SSJKS4. Исследование работы аналогового мультиплексора”.) АНАЛОГО-ЦИФРОВОЕ ПРЕОБРАЗОВАНИЕ.[Л.2, глава 5, с.189] Преимущества обработки информации и осуществления функций управления с использованием цифровых методов становятся все более очевидными. Однако данные, которые мы получаем из реального мира, обычно представлены в аналоговой форме. Необходимый аналого-цифровой интерфейс обеспечивает система сбора данных. Она преобразует исходные данные от одного или нескольких измерительных преобразователей в выходной сигнал, пригодный для цифровой обработки; преобразование осуществляется с помощью таких компонентов, как усилители, фильтры, схемы выборки — хранения, мультиплексоры и аналого-цифровые преобразователи (АЦП). В этой главе в фокусе нашего обсуждения будет аналого-цифровой преобразователь — наиболее важная часть любой системы сбора данных. Сначала подробно обсуждаются принципы аналого-цифрового преобразования, конкретные функциональные схемы преобразователей, а также принципы выбора АЦП и их сопряжения с другими устройствами. Затем описываются системы сбора данных и их компоненты. В конце главы рассматривается конструкция 16-канальной недорогой системы сбора данных для IВМ РС. ПРИНЦИПЫ РАБОТЫ АЦП. В этом разделе вводятся основные понятия и определяются некоторые широко используемые термины, относящиеся к АЦП, а также описываются характеристики входных и выходных сигналов типичного АЦП [З]. Основное соотношение между входными и выходными сигналами Аналого-цифровое преобразование по существу является операцией, устанавливающей отношение двух величин. Входной аналоговый сигнал vi преобразуется в дробь x путем сопоставления его значения с уровнем опорного сигнала Vr. Цифровой сигнал преобразователя есть кодовое представление этой дроби. Это фундаментальное соотношение иллюстрируется на рис. 5.1 (а). Если выходной код преобразователя является n-разрядным, то число дискретных выходных уровней равно 2 Q = МЗР ПД/2 Где Q — квант, МЗР — аналоговый эквивалент МЗР и ПД — полный диапазон изменения входного аналогового сигнала. 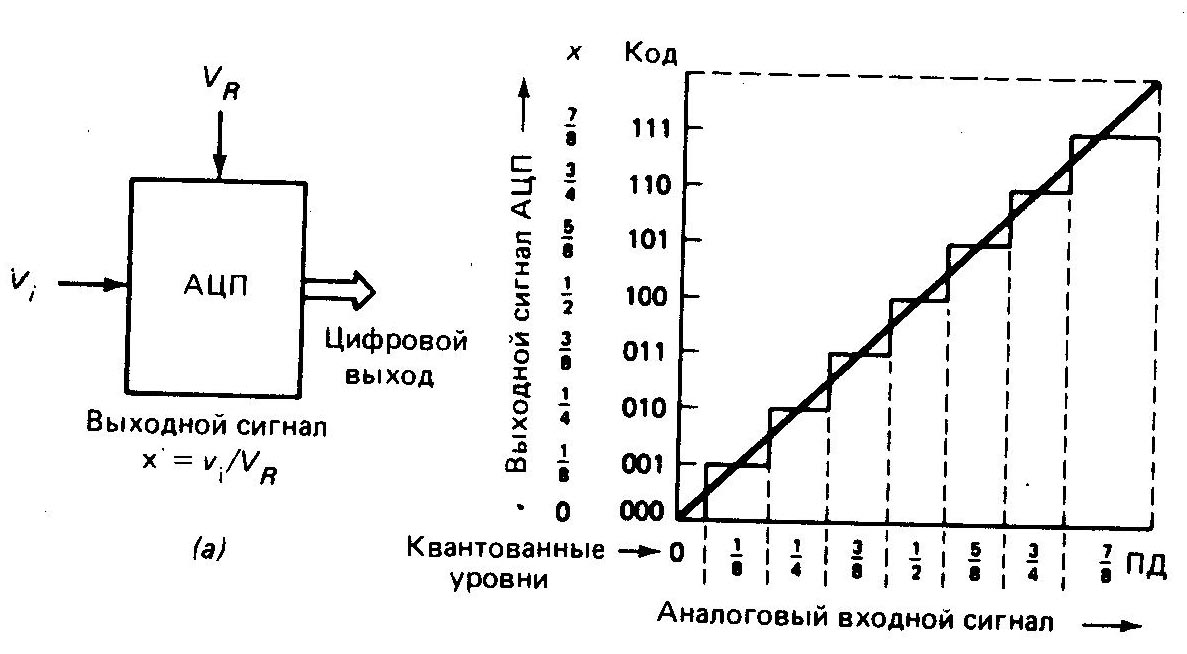 Все аналоговые величины внутри заданного интервала разбиения представляются одним и тем же цифровым кодом, которому обычно ставят в соответствие значение аналоговой переменной в средней точке интервала, называемое пороговым уровнем [5]. Тот факт, что входной сигнал может отличаться от порогового уровня на величину, достигающую ± Погрешности преобразователя Характеристики реальных преобразователей по ряду параметров могут отличаться от идеальных характеристик (аналогичных идеальной характеристике на рис. 5.1(6). Передаточная характеристика преобразователя может быть сдвинута относительно идеальной характеристики (рис. 5.2(а)). Эта погрешность «смещения» или «установки нуля» определяется как значение аналоговой величины, при которой характеристика пересекает ось входных напряжений [4]. Наклон передаточной характеристики может отличаться от своего идеального значения, что приводит к погрешности «наклона» или «усиления» (рис. 5.2(6)). Для большинства имеющихся в продаже АЦП погрешности смещения и усиления или очень малы, или могут быть практически полностью устранены с помощью предварительных регулировок. Труднее устранить погрешности, связанные с нелинейностью передаточной характеристики, которые невозможно уменьшить с помощью регулировки. В АЦП проявляются два типа нелинейности – интегральная и дифференциальная. Интегральная нелинейность определяется максимальным отклонением передаточной характеристики от идеальной прямолинейной характеристики при нулевых значениях погрешностей смещения и усиления (рис. 5.2(в)). Дифференциальная нелинейность — это отклонение величины одного из квантов от его идеального аналогового значения. Заметим, что если дифференциальная нелинейность превышает 1 МЗР, то в выходном сигнале может отсутствовать одна из кодовых комбинаций (выпадающий код), как показано на рис. 5.2(г).  Разрешение преобразователя Этот наиболее важный параметр преобразователя определяется как минимальная величина изменения аналогового напряжения на входе АЦП, вызывающая изменение выходного кода на один МЗР. Значение этого параметра обычно указывается в расчете на идеальный преобразователь и поэтому скорее отражает возможности преобразователя, чем его реальные рабочие характеристики. Разрешение может задаваться в процентах от полного диапазона, в милливольтах для заданного диапазона изменения входного сигнала или просто, как это чаще всего делается, числом разрядов преобразователя. Точность преобразователя Точность преобразователя определяется как максимальная разность между фактическим входным напряжением и аналоговым эквивалентом двоичного выходного кода при заданном полном диапазоне. Этот параметр называют абсолютной точностью, когда его значение указывается в реальных вольтах. Однако гораздо чаще при определении точности на единицу измерения аналогового сигнала принимается величина МЗР; тогда речь идет об относительной точности. В любом случае, точность преобразователя есть максимальное значение суммы всех его погрешностей, включая погрешность квантования. В спецификации погрешностей преобразователя обычно указываются отдельные погрешности в единицах МЗР. Для преобразователей, которые не требуют коррекции смещения или усиления (к ним относится, например, АЦП ADC0816 фирмы National Semiconductor), может быть указана полная некорректируемая погрешность (± Время преобразования и производительность преобразователя После того как на АЦП поступает команда запуска, требуется некоторое конечное время, называемое временем преобразования Рассмотрим, например, синусоидальный входной сигнал с амплитудой А и частотой f: Vi = A sin (2 преобразование которого осуществляется с помощью 8-разрядного преобразователя, и пусть время преобразования tc = 100 мкс. Скорость изменения входного сигнала а максимальное значение этой величины составляет ( Полагая ПД = 2А (полный размах синусоидального сигнала), получаем 2 f f Таким образом, даже в случае относительно гладкого синусоидального сигнала мы ограничены низкой частотой 12,4 Гц. При столь жестком ограничении диапазон применений АЦП был бы исключительно узок. Эта трудность обходится путем использования на входе АЦП схемы или устройства выборки — хранения (УВХ). УВХ — простая аналоговая схема, которая по команде осуществляет отсчет значения входного сигнала и затем сохраняет это значение на приблизительно постоянном уровне,пока АЦП выполняет преобразование. Временным интервалом, определяющим по приведенной выше формуле допустимую скорость изменения входного напряжения, является теперь время задержки, называемое также апертурным временем ta. Здесь имеется в виду характерная для УВХ задержка между моментом получения команды и моментом фактического перехода схемы в режим хранения (схемы выборки — хранения очень подробно обсуждаются в разд. 5.4). Типичное значение апертурного времени — несколько десятков наносекунд. Если мы используем УВХ с апертурным временем, скажем 20 нc, то максимальная допустимая частота входного сигнала составит f Это вполне приемлемое значение для преобразователя с tс = 100 мкс. Значение f Производительность преобразователя — еще один важный параметр. Это — число отсчетов входного сигнала, выполняемых преобразователем в единицу времени при сохранении полной точности. Производительность преобразователя рассчитывается как обратная величина полного времени, необходимого для выполнения одного завершенного преобразования. Она является обратной величиной времени преобразования только в том случае, когда не используется УВХ. Пример расчета производительности с учетом влияния УВХ приведен в разд. 5.6. Входные и выходные сигналы преобразователя Аналоговый входной сигнал. Большинство монолитных преобразователей сконструированы в расчете на работу с дифференциальным или отсчитываемым от потенциала земли однополярным входным сигналом. Уровень этого сигнала должен быть согласован с установленным входным диапазоном преобразователя. Чаще всего используются входные диапазоны 0...10В и 0...5В. Если фактический диапазон изменения входного сигнала составляет только часть полного входного диапазона преобразователя, то некоторые выходные кодовые комбинации преобразователя никогда не будут реализованы. При этом неоправданно сужается динамический диапазон преобразователя, что приводит к более сильному влиянию погрешностей преобразователя на выходной сигнал. Наилучшее решение этой проблемы — выбор преобразователя с наиболее подходящим входным диапазоном и предварительное масштабирование входного сигнала с помощью операционного усилителя. В большинстве систем входной сигнал обычно требует некоторой предварительной обработки, и согласование может быть выполнено в конечном каскаде соответствующей обрабатывающей схемы. В некоторых случаях недостаточный размах входного сигнала можно скомпенсировать путем пропорционального уменьшения масштаба опорного сигнала при условии, что в конструкции преобразователя предусмотрена возможность регулировки уровня опорного сигнала. Для биполярного входного сигнала тоже можно использовать однополярный преобразователь, сначала масштабируя этот сигнал, а затем добавляя к нему напряжение смещения, как показано на рис. 5.3. Если же на выходе необходимо иметь информацию о полярности сигнала, приходится использовать биполярный преобразователь. Биполярные преобразователи работают с биполярными входными диапазонами, чаще всего от -5 до +5 В, и вырабатывают выходные сигналы в виде биполярных цифровых кодов (дополнительном, смещенном, прямом или обратном), которые обсуждались в разд. 4.1. Аналоговый опорный сигнал. На рис. 5.4(а) показаны входы и выходы типичного АЦП. Для работы каждого АЦП нужен аналоговый опорный сигнал, с которым сравнивается входной сигнал.  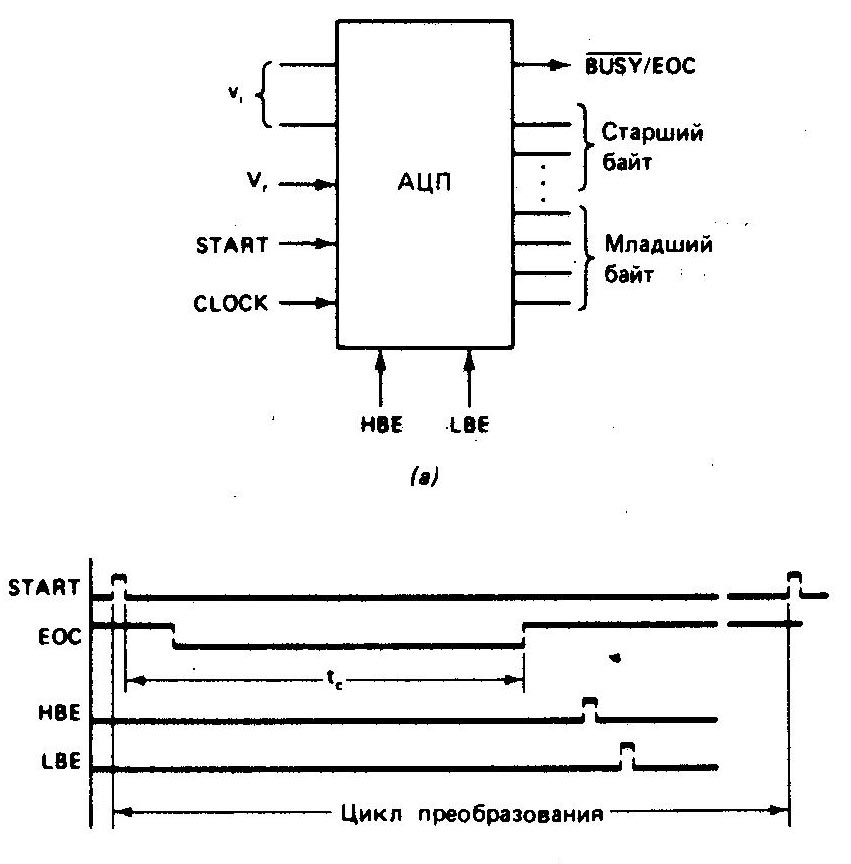 Рис. 5.4 Аналого-цифровой преобразователь (АЦП). (а) Типичные входы и выходы. (б) Типичные временные диаграммы управляющих сигналов. Любая погрешность опорного сигнала, связанная с неточностью его первоначальной установки или температурным и временным дрейфом, проявляется как погрешность усиления в передаточной характеристике АЦП. Поэтому точность и стабильность опорного сигнала являются важнейшими факторами в реализации полной точности АЦП. Дешевые интегральные стабилизаторы представляют собой подходящие источники опорного сигнала при условии, что окружающая температура изменяется в небольших пределах. Однако для большинства применений требуется лучшая температурная стабильность, которая может быть обеспечена прецизионными интегральными источниками опорного напряжения. Существующие источники опорного напряжения на ИС можно разделить на два типа. В источниках первого типа используется обратный пробой компенсированного зенеровского диода (стабилитрона). Типичное напряжение таких источников равно примерно 6,9В, а температурный коэффициент напряжения изменяется в диапазоне (5...100)∙10 Источники опорного напряжения обоих типов следует использовать с буферными схемами (иногда располагаемыми на самом кристалле) для масштабирования напряжения к требуемому уровню и улучшения стабильности рабочей точки. Такие буферизованные источники опорного напряжения на ИС — наиболее подходящие источники опорного сигнала для большинства АЦП. Выходные сигналы. Выходной цифровой сигнал АЦП характеризуется числом разрядов (разрешением) и типом используемого кода. Наибольшее распространение получили преобразователи с 8- и 12-разрядным разрешением. Однако имеется также достаточно широкий выбор преобразователей с разрешением 10 разрядов. 3 Управляющие сигналы. Для функционирования любого АЦП требуются синхронизирующий и некоторые управляющие сигналы. Представление об управляющих сигналах лучше всего получить, рассматривая один цикл преобразования типичного АЦП (рис. 5.4(6)). Внешнее устройство, с которым связан АЦП (например, микропроцессор), инициирует процесс преобразования путем переключения на мгновение входа START АЦП в состояние высокого уровня. В момент начала процесса преобразования АЦП переводит в состояние низкого уровня свою линию BUSY/EOC (АЦП занят/ Преобразование завершено). Таким образом, внешним устройствам сообщается, что идет процесс преобразования и что пока еще не следует вести поиск выходных данных и не следует инициировать новый цикл преобразования. По завершении текущего преобразования АЦП возвращает эту линию в исходное состояние высокого уровня. Этот переход, как правило, используется для генерации сигнала прерывания микропроцессора или какого-либо другого сигнала, сообщающего внешнему устройству о завершении преобразования. Внешнее устройство посылает в АЦП сигнал разрешения вывода (ОЕ), разрешающего АЦП выдачу выходного слова на шину данных. В преобразователях с более чем 8-разрядным разрешением сигнал ОЕ может разбиваться на два сигнала — разрешения вывода старшего байта (НВЕ) и разрешения вывода младшего байта (LBE), в результате чего выходное слово преобразователя может передаваться по 8-разрядной шине данных в виде двух последовательных посылок. | ||||||||||||||||||||||||||||||