Лекции по Информационно-измерительным системам. Основные определения. Области применения иис, Л. 1, глава 1, с. 6
 Скачать 2.88 Mb. Скачать 2.88 Mb.
|

МЕТОДЫ АНАЛОГО-ЦИФРОВОГО ПРЕОБРАЗОВАНИЯВ этом разделе мы обсудим некоторые основные схемотехнические приемы, используемые при построении внутренних функциональных структур АЦП. Будут рассмотрены важнейшие характеристики этих конструкций. Большинство схемных реализаций АЦП основано или на использовании внутреннего ЦАП, или на применении некоторого способа интегрирования для осуществления функции преобразования. Существуют АЦП, не относящиеся ни к одному из этих двух широких классов преобразователей; в них реализован способ параллельного или мгновенного преобразования, используемый главным образом для построения сверхбыстродействующих АЦП. АЦП с динамической компенсацией и следящий АЦП На рис. 5.5(а) показана структурная схема АЦП с динамической компенсацией. В этом АЦП используется счетчик импульсов, который в процессе счета обеспечивает постепенное нарастание выходного сигнала связанного с ним ЦАП, пока этот сигнал не превысит уровень входного сигнала. Счетчик сбрасывается перед началом каждого преобразования и затем увеличивает свое содержимое на 1 при прохождении каждого тактового импульса. Выходной сигнал ЦАП при каждом единичном изменении состояния счетчика возрастает на величину МЗР, как показано на рис. 5.5(6). Компаратор останавливает счетчик, когда выходное напряжение ЦАП достигает уровня входного сигнала. Выходной сигнал (состояние) счетчика в этот момент как раз и является цифровым выходным сигналом АЦП. Главный недостаток этого простого способа аналого-цифрового преобразования — зависимость времени преобразования от уровня входного сигнала, причем это время может быть к тому же довольно велико (2 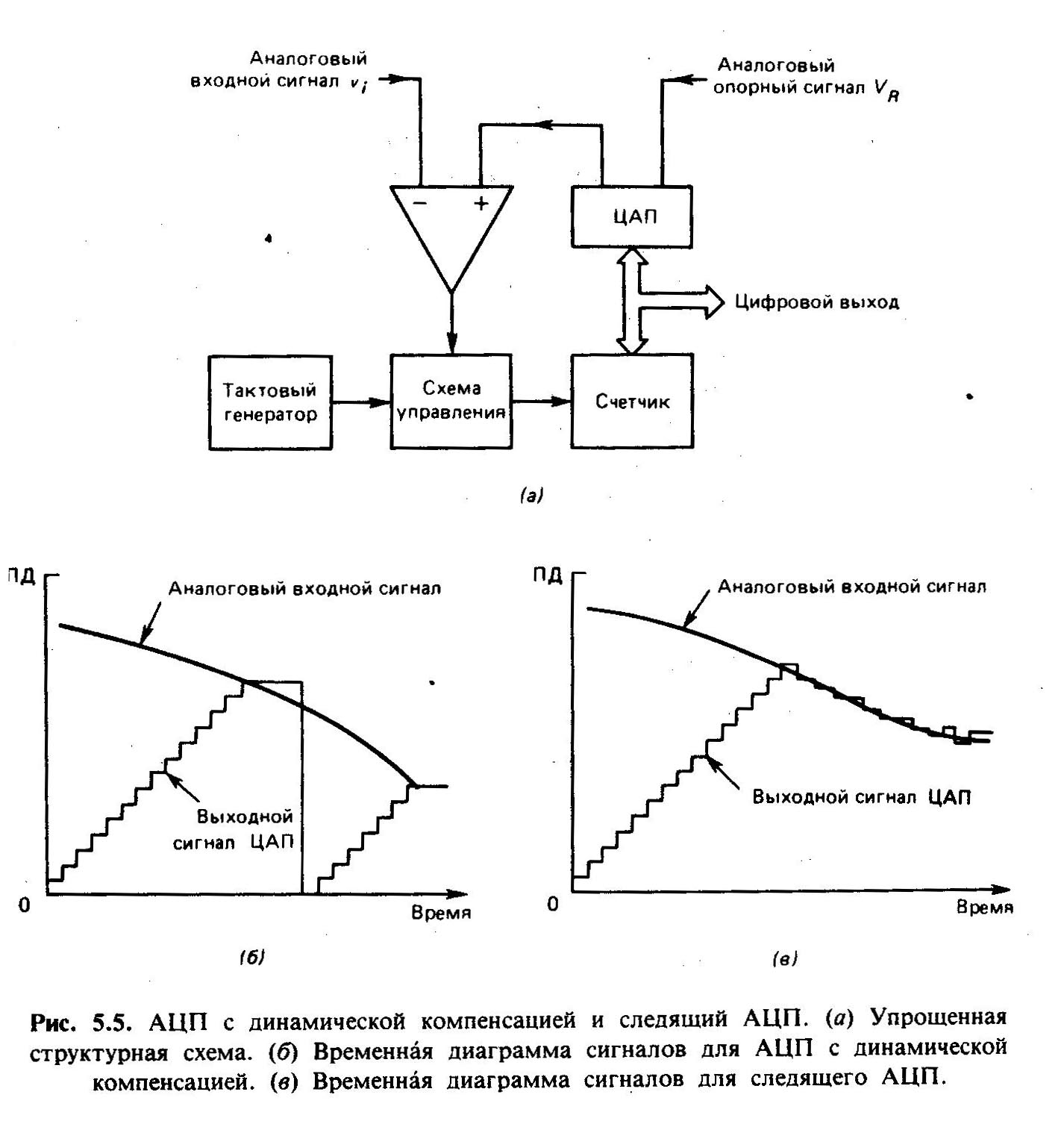 В модифицированном варианте АЦП с динамической компенсацией — так называемом «следящем» АЦП (или «серво-АЦП») — используется реверсивный счетчик, позволяющий ЦАП непрерывно отслеживать входной сигнал при условии, что изменения входного сигнала невелики. На рис. 5.5(в) иллюстрируется характер изменения выходного сигнала ЦАП в АЦП следящего типа. Останавливая счетчик подачей внешнего воздействия в нужный момент времени, мы можем использовать следящий АЦП в качестве УВХ с цифровым выходом и сколь угодно большим временем хранения. Допуская возможность счета или только в прямом, или только в обратном направлении, можно с помощью этого АЦП получать цифровой выходной сигнал, соответствующий максимальному или минимальному значению входного сигнала в данном временном интервале. АЦП последовательного приближения Метод последовательного приближения — наиболее распространенный способ реализации функции аналого-цифрового преобразования в преобразователях со средним и высоким быстродействием. В структуру АЦП последовательного приближения также входит ЦАП. Однако в отличие от АЦП с динамической компенсацией в АЦП последовательного приближения выходной сигнал ЦАП нарастает до уровня входного сигнала точно за n тактов (для n-разрядного преобразователя). В результате процесс преобразования занимает гораздо меньше времени, и, кроме того, время преобразования не зависит от уровня входного сигнала. Данный метод основан на аппроксимации входного сигнала двоичным кодом и последующей проверке правильности этой аппроксимации для каждого разряда кода, пока не достигается наилучшее приближение к величине входного сигнала. На каждом этапе этого процесса двоичное представление текущего приближения хранится в так называемом регистре последовательного приближения (РПП). На рис. 5.6 показана базовая функциональная схема 3-разрядного АЦП последовательного приближения с иллюстрацией принципа ее работы. Преобразование всегда начинается с установки единичного значения СЗР в РПП. 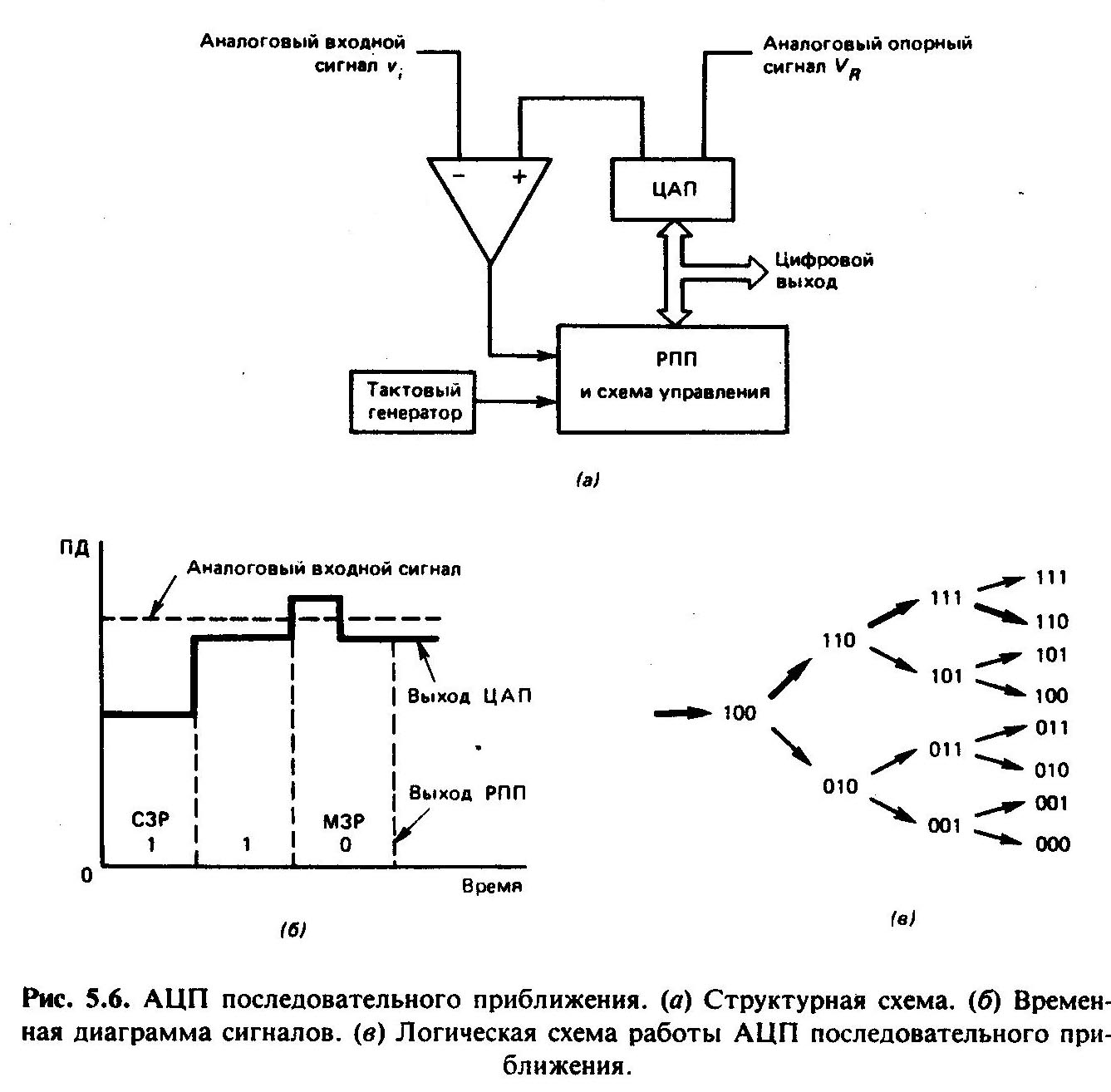 Это соответствует первоначальной оценке величины входного сигнала половиной величины полного диапазона (полной шкалы). Компаратор сравнивает выходной сигнал ЦАП с входным напряжением и выдает контроллеру команду на сброс СЗР, если эта первоначальная оценка превышает величину входного сигнала; в противном случае остается установленное значение СЗР. В следующем такте котроллер устанавливает в единичное значение следующий (по старшинству) разряд, и снова, исходя из уровня входного сигнала, компаратор «решает», сбрасывать или оставлять установку этого разряда. Преобразование продолжается аналогичным образом, пока не будет проверен последний МЗР. В этот момент содержимое РПП и выходного регистра является наилучшим двоичным приближением входного сигнала — это и есть выходной цифровой сигнал (слово) АЦП. Поскольку в процессе последовательного приближения установка значений разрядов выполняется в последовательном порядке, то в АЦП этого типа исключительно просто обеспечивается последовательный вывод данных. Обратим внимание, что предполагалось постоянство уровня входного сигнала в процессе преобразования. Вообще говоря, мы не можем гарантировать выполнение этого условия, и необходимо учитывать влияние изменения входного напряжения на выходной сигнал преобразователя; эта проблема обсуждалась в разд. 5.1. Двухтактный интегрирующий АЦП На рис. 5.7 иллюстрируется метод двухтактного (или двойного) интегрирования. Входное напряжение интегрируется в течение фиксированного интервала времени Т1, который, как правило, соответствует временной реализации всей счетной последовательности внутреннего счетчика. В конце этого интервала счетчик сбрасывается, а вход интегратора переключается на источник опорного сигнала. Выходное напряжение интегратора теперь уменьшается по линейному закону, пока не достигается его нулевое значение, где счетчик останавливается и интегратор устанавливается в исходное состояние. Заряд, накопленный интегрирующим конденсатором в течение первого интервала, должен быть равен заряду, потерянному им в течение второго интервала; значит, Отсюда следует Заметим, что отношение временных интервалов является одновременно отношением содержимого счетчика к числовому выражению полного диапазона счета. Другими словами, состояние счетчика в конце интервала t2 представляет собой выходное слово на двоичном выходе АЦП, Рассмотренная схема преобразования легко модифицируется для АЦП, использующих другие выходные коды. Метод двухтактного интегрирования обеспечивает ряд преимуществ, главное из которых — отличные шумовые характеристики.  Поскольку входное напряжение интегрируется в течение некоторого промежутка времени, любые высокочастотные шумы, накладывающиеся на входной сигнал, при интегрировании компенсируются. Кроме того, фиксированный временной интервал Т1 можно выбрать таким, чтобы почти полностью исключить помехи с частотами, кратными 1/Т1. Для этой цели обычно выбирается временной интервал, определяемый частотой бытовой сети. Следует отметить, что вариации частоты синхронизации не влияют на разрешение. Разрешение преобразователя ограничено только возможностями входящих в него аналоговых схем, а не дифференциальной нелинейностью, так как выходной сигнал интегратора непрерывен и не может приводить к появлению каких-либо выпадающих кодовых комбинаций на выходе преобразователя. Поэтому довольно просто получить хорошее разрешение и варьировать его путем изменения разрядности внутреннего счетчика и частоты синхронизации. Главный недостаток двухтактного интегрирующего АЦП — низкое быстродействие. Например, если Т1 выбирается из условия ослабления сетевых наводок с частотой 60Гц и их гармоник, то минимальное возможное значение Т1 будет равно 16,67 мс. Поскольку время преобразования может вдвое превышать эту величину, то производительность преобразователя ограничена 30 отсчетами в секунду; такая производительность слишком мала для любой быстродействующей системы сбора данных. Двухтактные интегрирующие преобразователи широко используются в измерительных устройствах с отображением информации на цифровых индикаторных панелях, в цифровых мультиметрах и термометрах и в других аналогичных устройствах, где допустима низкая скорость отсчетов. АЦП с преобразованием напряжения в частоту 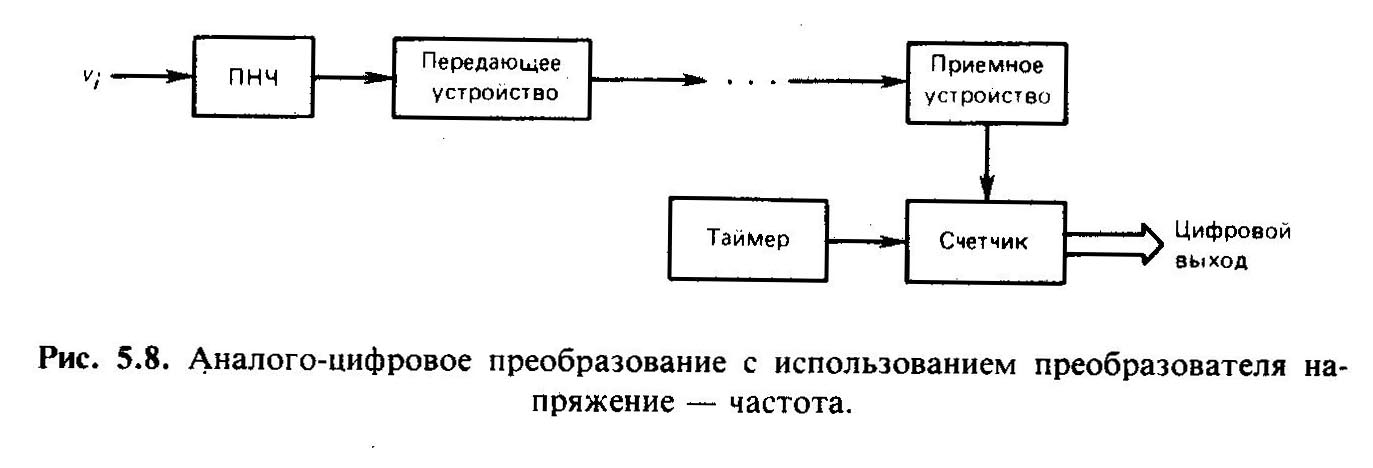 На рис. 5.8 представлена схема метода аналого-цифрового преобразования с использованием преобразования напряжения в частоту. Аналоговое входное напряжение преобразуется с помощью прецизионного преобразователя напряжение — частота (ПНЧ) в последовательность импульсов, частота которых пропорциональна величине этого напряжения. Затем счетчик формирует выходное цифровое слово путем подсчета этих импульсов в течение фиксированного интервала времени. Заметим, что входной сигнал эффективно интегрируется в этом интервале. Как и метод двухтактного интегрирования, данный метод преобразования характеризуется низким быстродействием, но хорошей помехоустойчивостью. Если приемлемо большое время преобразования, метод преобразования напряжение — частота позволяет получить высокое разрешение для медленно изменяющихся сигналов при очень низкой стоимости. Например, при подсчете импульсов ПНЧ с частотой 10 кГц в течение 1 с обеспечивается точность 10-5 (т. е. лучшая, чем при 13-разрядном разрешении). Более того, эта точность сохраняется в широком диапазоне изменения величины входного сигнала. Громадные преимущества использования преобразования напряжение — частота очевидны для систем дистанционного считывания данных в условиях внешних помех. В таких применениях ПНЧ располагается в непосредственной близости к удаленному измерительному преобразователю. Последовательность импульсов, вырабатываемых ПНЧ, в цифровой форме передается на большие расстояния к станции контроля, где приемно-счетное устройство преобразует эту последовательность в цифровой выходной сигнал. Тем самым исключается передача аналогового сигнала по подверженным внешним помехам линиям передачи и возможное при такой передаче ухудшение отношения сигнал/шум. Передача данных в цифровой форме исключает также синфазные помехи. При необходимости может быть обеспечена гальваническая развязка выхода преобразователя с датчиком; это требуется при осуществлении контроля и управления в высоковольтных системах. Практическая эффективность использования данного метода аналого-цифрового преобразования зависит от наличия дешевых ПНЧ с хорошей линейностью и стабильностью. Имеется несколько методов реализации функции преобразования напряжения в частоту. Наиболее известный из них — метод зарядового уравновешивания, который обсуждался в разд. 1.9, где были также описаны некоторые ПНЧ, имеющиеся в продаже. АЦП параллельного, или мгновенного, преобразования  Метод мгновенного, или параллельного, преобразования иллюстрируется на рис. 5.9. Он используется в тех случаях, когда требуется очень высокая скорость преобразования, например в видеотехнике, радиолокации, в цифровых осциллографах. В этом методе входной сигнал сравнивается одновременно со всеми пороговыми уровнями с помощью компараторов, смещенных по уровню опорного сигнала на 1 МЗР относительно друг друга. Смещение в преобразователе обеспечивается путем использования генератора опорного сигнала и прецизионной резистивной схемы. При подаче аналогового сигнала на вход АЦП компараторы, смещенные выше уровня входного сигнала, имеют на выходе логический 0, а смещенные ниже этого уровня — логическую 1. Так как все компараторы изменяют свое состояние одновременно, процесс квантования осуществляется за один шаг. Быстродействующий шифратор затем преобразует выходные сигналы компараторов в выходной сигнал всего АЦП. Скорость преобразования в этом случае достигает 100МГц при 8-разрядном разрешении. Однако разрешение монолитных параллельных преобразователей ограничено из-за большого числа требуемых компараторов (255 для 8-разрядного АЦП). Программная реализация аналого-цифрового преобразования Такие функции, как счет, сдвиг, инвертирование, преобразование кодов и некоторые другие реализуются с помощью программных средств самого микропроцессора. Иногда используется такая программная реализация аналого-цифрового преобразования. Однако ее практическая ценность невелика, поскольку имеется очень большой выбор дешевых АЦП с хорошими рабочими характеристиками. Рекомендации по выбору и использованию АЦП. [Л.2, глава 5, с.220-229] Аналого-цифровые преобразователи. Фирмы, выпускающие АЦП, предлагают устройства с очень широким диапазоном рабочих параметров. Используемый метод преобразования (последовательного приближения, двухтактного интегрирования, параллельного преобразования или какой-либо другой из рассмотренных в разд. 5.2) и технология изготовления схемы (монолитная, гибридная, модульная) определяют наиболее существенные характеристики АЦП – быстродействие, разрешение, стоимость. Диапазоны изменения некоторых характеристик серийно выпускаемых АЦП разного типа представлены на рис. 5.15. 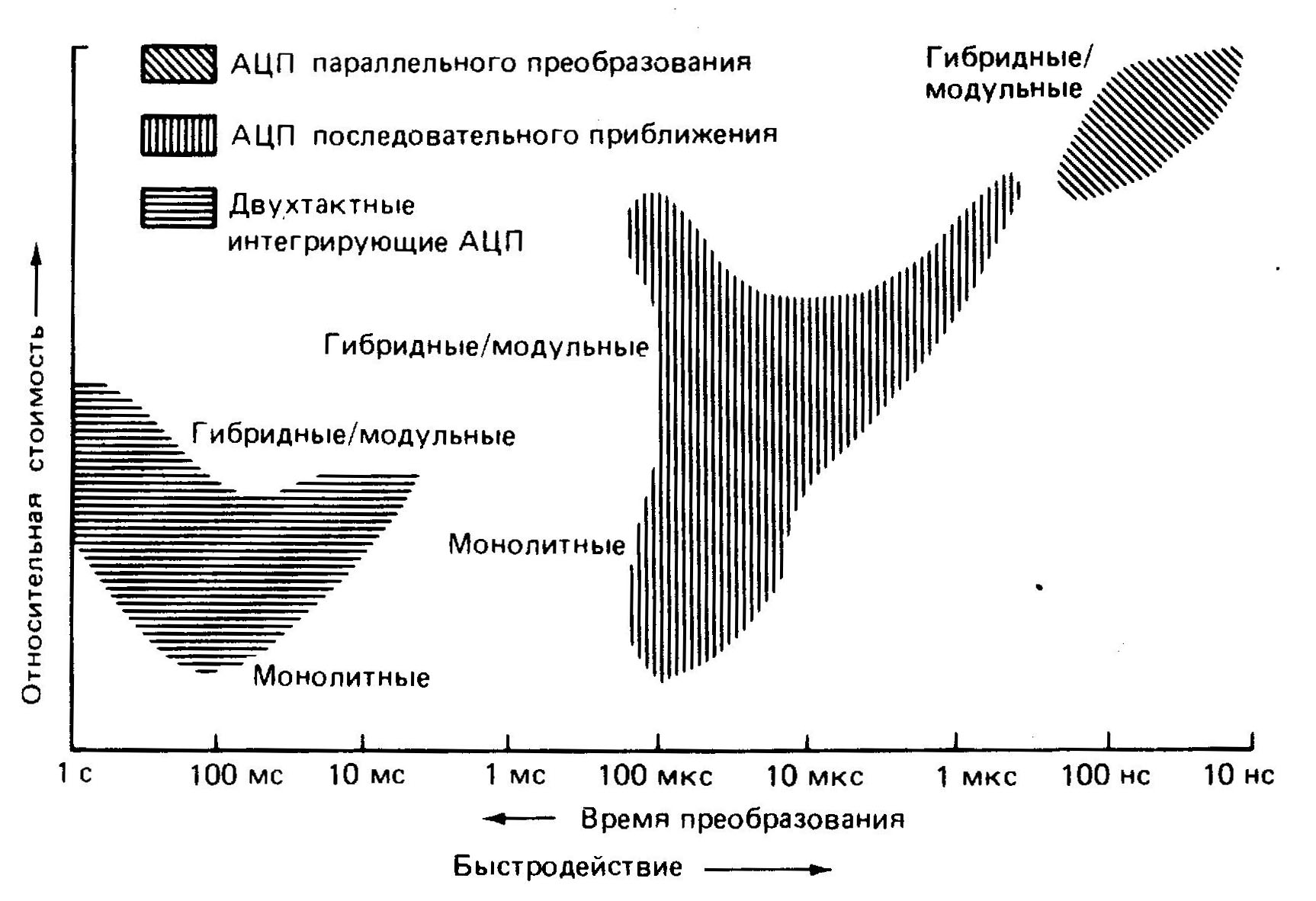 Наиболее широк выбор АЦП последовательного приближения,используемых в большинстве случаев применения аналого-цифрового преобразования. Самыми дешевыми являются монолитные АЦП. За последние несколько лет сделан громадный скачок в улучшении их рабочих параметров. Монолитные АЦП изготавливаются с использованием КМОП- и биполярной технологий. КМОП АЦП характеризуются очень малым энергопотреблением и допускают реализацию на самом кристалле аналогового мультиплексора, входного фиксатора, дешифратора и тристабильного буфера. Однако в КМОП-технологии возникают трудности с формированием прецизионного источника опорного сигнала и прецизионного быстродействующего компаратора. Биполярная технология обеспечивает простую реализацию этих функций, но при относительно невысоком уровне интеграции. Эти ограничения можно обойти при использовании И Выбор АЦПЧтобы правильно выбрать АЦП для конкретного применения, нужно знать обусловленные этим применением требования к его рабочий параметрам — разрешению, времени преобразования, допустимой погрешности и т. д. Эти требования определяются проектируемыми техническими характеристиками разрабатываемой системы сбора данных. Наиболее важными являются следующие характеристики: Число аналоговых каналов. Производительность. Учитывается как производительность всей системы, так и максимальная производительность для отдельных каналов. Расположение измерительных преобразователей (вблизи или в удалении от выходного терминала). Точность преобразования. Окружение. В частности, важно знать уровень электрических помех и диапазон изменения окружающей температуры. Стоимость системы Разработка системы обычно начинается с выбора ее конфигурации (см. разд. 5.4). Затем выясняются требования к рабочим характеристикам каждого компонента системы. Мы обсудим этот этап на примере АЦП. Точность АЦП. Требования к точности преобразователя вытекают из соответствующей технической характеристики разрабатываемой системы сбора данных с учетом погрешностей, вносимых всеми другими компонентами этой системы. Распространенная ошибка — выбор АЦП с разрешением, удовлетворяющим этому требованию по точности, поскольку фактическая точность преобразователя хуже того значения, на которое указывает разрешение, в силу наличия различных погрешностей преобразователя. Список вкладов основных погрешностей, называемый бюджетом погрешностей, помогает рассчитать реальную точность преобразователя. Пример составления бюджета погрешностей и расчета точности приведен в разд. 5.6. Время преобразования. Требуемое от АЦП число преобразований, выполняемых за одну секунду, определяется проектируемой производительностью системы сбора данных, числом каналов и выбранной конфигурацией системы. Частота дискретизации по одному каналу равна производительности АЦП только в том случае, когда для каждого канала используется отдельный АЦП. Список всех временных задержек, связанных с одним преобразованием, называется временным бюджетом. Производительность АЦП рассчитывается, исходя из этого временного бюджета. Пример расчета производительности АЦП приведен в разд. 5.6. Тип АЦП. Для выбора типа АЦП обычно достаточно информации об используемой конфигурации системы, требуемом разрешении АЦП и времени преобразования. Например, для обеспечения среднего или высокого быстродействия следует выбрать АЦП последовательного приближения. Если одновременно требуется также высокое разрешение, то придется, по-видимому, применить АЦП, выполненный по гибридной технологии. При высоком разрешении, но низком быстродействии более подходящим будет двухтактный интегрирующий АЦП. Двухтактному интегрирующему АЦП следует отдать предпочтение и в тех случаях, когда нужно обеспечить высокую помехоустойчивость или ослабить наводки с частотой 60 Гц. Аналогично в системах дистанционного сбора данных лучше всего использовать АЦП на основе преобразования напряжения в частоту, тогда как в сверхбыстродействующих системах сбора данных вне конкуренции будет АЦП параллельного преобразования. Другие факторы. Выяснив, какой тип АЦП нам нужем, мы должны затем выбрать среди АЦП данного типа устройство, удовлетворяющее всем другим нашим требованиям. Например, диапазон температур, в котором предполагается использовать АЦП, определяет эксплуатационный класс выбираемого устройства: должно ли оно относиться к классу коммерческих устройств (диапазон рабочих температур О... 70° С) или предназначается для промышленных (-25... +85°С) или военных (-55... +125 °С) применений. Нужно проверить также входной диапазон устройства, его совместимость с биполярными входными сигналами, форму представления выходных цифровых данных (последовательная или параллельная) и, если это необходимо, возможность реализации интерфейса с микропроцессорами. Рекомендации по использованию АЦП Соблюдение некоторых простых правил при использовании АЦП будет гарантией того, что мы получим от него наибольшую отдачу. Используйте полный входной диапазон АЦП. Если входной сигнал изменяется только от 1 до 3,5В при использовании АЦП с входным диапазоном 0...5В, погрешность преобразователя фактически удваивается. Чтобы предотвратить это неоправданное ухудшение рабочих характеристик преобразователя, используйте предварительное масштабирование сигнала для обеспечения максимально возможного соответствия диапазона его изменения и входного диапазона АЦП. Используйте хорошие источники опорного сигнала. Температурный и временной дрейфы опорного сигнала проявляются как погрешность усиления и поэтому должны удерживаться на минимальном уровне. Прецизионный интегральный источник опорного сигнала — хороший выбор для большинства применений. Обращайте внимание на скорость изменения входного сигнала. Изменения входного сигнала в течение времени преобразования приводят к погрешности усиления в АЦП последовательного приближения. Если характер изменения входного сигнала непредсказуем, используйте УВХ. Модели УВХ общего назначения довольно дешевы. Используйте высококачественные полипропиленовые или полистирольные конденсаторы в качестве запоминающих конденсаторов в УВХ. Применяйте отдельные общие провода для цифровых и аналоговых схем. Цифровые сигналы создают большие выбросы тока на общих проводах. Общие провода аналоговых и цифровых компонентов схемы должны быть отдельными и должны соединяться только в одной общей точке. Добивайтесь минимизации помех и не забывайте о нагрузочных характеристиках схем. Стремитесь к уменьшению погрешностей входного аналогового сигнала, вызываемых земляными контурами, синфазными наводками и другими помехами, с помощью технических приемов, описанных в гл. 2. Вводите адекватное шунтирование (танталовый конденсатор емкостью 10мкф — для пульсаций и керамический конденсатор емкостью 10 или 100нФ — для импульсных помех) каждой ТТЛ ИС в цифровой части схемы. Не нагружайте управляющие линии более чем двумя ТТЛ БИС или используйте буферные схемы. Буферные схемы имеются на выходе большинства АЦП, но может потребоваться дополнительная буферизация, если выходные линии, по которым передаются данные, имеют достаточно большую длину или если к выходу АЦП подключено несколько других устройств. (дополнительный материал: ЛР №4 ”ИИС на примере контроллера SSJKS4. Исследование работы АЦП”.) Применение унифицирующих преобразователей. Основное назначение унифицирующих преобразователей связано с приведением аналоговых измерительных сигналов к диапазону стандартных значений(например установленных ГОСТ 9895-78 и ГОСТ 26013-81). Применение унифицирующих элементов расширяет возможности использования ИИС, делает их более универсальными. В то же время выполнение некоторых операций унификации сигналов (в частности, масштабирование) связано с введением дополнительных погрешностей в конечный результат измерения и контроля. Основные функции, выполняемые унифицирующими элементами, сводятся к линейным (установление нуля, температурная компенсация, масштабирование) и нелинейным (линеаризация) преобразованиям сигналов от измерительных цепей с датчиками, а также к уменьшению влияния на них помех. Унифицирующие преобразователи могут быть индивидуальными, связанными с одним датчиком, и групповыми, работающими с несколькими измерительными цепями. Групповые унифицирующие элементы обычно используются в системах, имеющих коммутаторы сигналов измерительных цепей. При применении групповых унифицирующих элементов особенно важно, чтобы выполнялись условия правильного согласования их точностных и динамических характеристик с характеристиками коммутатора и других элементов измерительного тракта. (см. также масштабные усилители, амплитудные ограничители, формирователи импульсных сигналов, триг. Шмитта…) |