Реферат - Системы реального времени. Основные понятия систем реального времени
 Скачать 461.5 Kb. Скачать 461.5 Kb.
|

|
РЕФЕРАТ по дисциплине: «Системы реального времени» на тему: «Основные понятия систем реального времени» Оглавление Введение …………………………………………………………………. 3 1 Системы реального времени, характеристики и их механизмы ……. 5 2 Архитектура ОС РВ. Классы ОС РВ ……………………………….... 10 Заключение ……………………………………………………………… 17 Список использованной литературы ………………………………….. 20 Введение СРВ (система реального (настоящего) времени) – именуется как аппаратно-программный комплекс, реагирующий в прогнозируемые времена на непредсказуемый поток наружных событий (информации). Собственно что, означает: 1) Система обязана успеть отозваться на событие, произошедшее на объекте, на протяжении времени, критического чтобы достичь желаемого результата события. Значение критичного времени для любого действия определяется объектом и самим событием, и, естественно, может быть различной, хотя время реакции системы предсказано (вычислено) при разработке системы. Неимение реакции в предсказанное время считается ошибкой для систем настоящего времени. 2) Система обязана успевать откликаться на сразу происходящие события. В том числе и в случае если два, либо более внешних событий происходят сразу, система обязана успеть отреагировать на любое из них на протяжении промежутков времени, критического для данных событий. Цель реферата заключается в следующем: - расширение, закрепление и систематизация теоретических знаний по изучаемой дисциплине; - формирование и совершенствование практических навыков учебно-исследовательской деятельности; - формирование навыков ведения самостоятельных теоретических и практических исследований; - приобретение опыта обработки, анализа и систематизации результатов практических (экспериментальных) исследований по дисциплине; Основными задачами выполнения реферата являются: - формирование навыков работы с научной литературой, со справочниками и другими информационными источниками, в том числе электронными ресурсами; - формирование навыков правильного оформления учебно-исследовательской работы. - формирование навыков научно оформлять и излагать свои мысли, выводы и результаты исследования. Актуальность темы исследования заключается в том, что понятие и режим РВ (систем реального времени) находится в тесной взаимосвязи с такими категориями как вычислительная система и ОС. Режимом РВ и системы реального (настоящего) времени можно называть такой режим функционирования вычислительной системы, правильность работы в котором определяется не только логической корректностью вычислений, но и временем, требующимся для получения результата вычислений. Объект исследования данной работы являются: СРВ (система реального (настоящего) времени) – именуется как аппаратно-программный комплекс, реагирующий в прогнозируемые времена на непредсказуемый поток наружных событий (информации, потока информации). Предмет исследования данной работы является: основные понятия систем реального времени. 1 Системы реального времени, характеристики и их механизмы Различают СРВ двух типов – жесткая СРВ и мягкая СРВ. Жесткая СРВ не допускают никаких задержек реакции системы ни при каких, условиях, так как: - результаты могут оказаться, бесполезны в случае опоздания, - может произойти катастрофа в случае задержки реакции, - стоимость опоздания может оказаться бесконечно велика. Из примеров жесткой СРВ можно назвать: бортовые системы управления, системы регистраторы аварийных событий, аварийной защиты. Мягкие СРВ отличаются тем, что задержка реакции не критична, хотя и может привести к увеличению стоимости результатов и снижению производительности системы в целом. Основное отличие между жесткими и мягкими системами РВ можно охарактеризовать так: жесткая СРВ никогда не опоздает с реакцией на событие, мягкая СРВ - не должна опаздывать с реакцией на событие [5]. Большое количество ПО ориентировано на «мягкое» РВ, а задача СРВ – обеспечить уровень безопасного функционирования системы, даже если управляющая программа никогда не закончит своей работы. ОС общего назначения, ориентированы на оптимальное распределение ресурсов компьютера между пользователями и задачами. В ОС РВ основной задачей это успеть среагировать на события, происходящие на объекте. Одно из коренных внешних отличий это четкое разграничение систем разработки и систем исполнения. Система исполнения в ОС РВ это, так сказать, набор инструментов (исполняемые модули, ядро, драйверы), обеспечивающих функционирование приложения РВ [5]. Система исполнения в ОС РВ и компьютер, на котором она выполняется, называется "целевой" системой. Система разработки - набор средств, обеспечивающих создание и отладку приложения РВ (отладчики, компиляторы, и т.д.). Характеристики ОС РВ. Механизмы реального времени В связи со специфичностью поставленных и решаемых задач, ОС РВ должна иметь конкретные свойства. Ориентировочное время реакции, которая зависит от области применения ОС РВ, может быть следующее: - математическое моделирование - несколько микросекунд - радиолокация - несколько миллисекунд - складской учет - несколько секунд - управление производством - несколько минут С чего видно, что времена достаточно разнятся и дают разные требования на вычислительную установку, в которой работает ОС РВ. Интервал времени - от события на объекте и до выполнения первой операции в програмной обработке данного события есть, и определяется временем реакции системы на события. Интервал времени имеет место - от возникновения запроса на прерывание и до выполнения первой инструкции обработчика определяется целиком свойствами ОС и архитектурой компьютера. В ОС РВ заложен параллелизм, возможность одновременной обработки большого количества событий, исходя из этого, все ОС РВ многозадачные. Для этого, чтобы уметь оценивать накладные расходы системы при обработке параллельных событий, необходимо знать время, которое необходимо системе на передачу управления от процесса к процессу, так называемое, время переключения контекста [8]. Время перезагрузки системы. Данный параметр является важным для систем, от которых требуется непрерывная работа. В таких случаях важным есть такая особенность системы как ее живучесть при незапланированных перезагрузках. Множество ОС РВ достаточно устойчивы к перезагрузкам и могут быть перезагружены и прерваны в любой момент времени. Вычислительные установки, на которых установлены ОС РВ, можно условно поделить на основные группы: - «Обычные» компьютеры. - Промышленные компьютеры. Встраиваемые системы. Инсталлируются вовнутрь оборудования, коим они управляют. Для большого оборудования имеют все шансы по выполнению совпадать с промышленными компьютерами. Для оборудования гораздо меньше имеют все шансы представлять собой микропроцессор с сопутствующими составляющими, размещенными на одной плате с иными электронными составляющими оборудования. Для маленьких систем микропроцессор с сопутствующими составляющими быть может частью одной из интегральных схем оборудования. По вопросу отличительных черт оборудования ОС РВ обязаны владеть следующими качествами: Размеры ядра и обслуживающих модулей системы обязаны быть не слишком велики. Вероятность выполнения системы из ПЗУ (ROM). Система обязана иметь возможность производить загрузку из ПЗУ. Для экономии места в ПЗУ часть системы имеет возможность сберегаться в сжатом виде и загружаться в ОЗУ при необходимости. Нередко система разрешает выполнять код, как в ПЗУ, но и в ОЗУ. При наличии независимого места в ОЗУ система сможет копировать себя из медленного ПЗУ в наиболее быстрое ОЗУ. К вспомогательным свойствам ОС РВ можно отнести последующие [8]: Наличие необходимых драйверов устройств. Если система имеет обьемную периферию, то наличие уже готовых драйверов может иметь значительное влияние на выбор ОС. Поддержка процессоров различной архитектуры. Учитывая то, что в промышленных компьютерах, серверах, встраиваемых системах широко используются процессоры разных архитектур с разной системой команд, ОС РВ должна поддерживать как можно более обширный ряд процессоров. Механизмы РВ. Которые в свою очередь делают СРВ предсказуемой: а) Система приоритетов и алгоритмы диспетчеризации: В многозадачных ОС общего предназначения употребляются, различные модификации метода круговой диспетчеризации, которые базируются на понятии постоянного кванта времени, предоставляемого процессу для работы. Планировщик по прошествии любого кванта времени просматривает очередь интенсивных процессов и воспринимает решение, кому и как скоро передать управление, базируясь на ценностях процессов. Ценности имеют все шансы быть зафиксированными либо изменяться со временем – данное во многом находится в зависимости от алгоритмов планирования в этой ОС, хотя в какой-то момент процессорное время получат все процессы в системе [7]. Методы радиальной диспетчеризации неприменимы в чистом облике в ОС РВ. Главный их недостаток - постоянный квант времени, на протяжении которого микропроцессором владеет исключительно один процесс. Планировщики ОС РВ имеют вероятность поменять процесс до истечения кванта времени, если в этом есть потребность. Один из вероятных алгоритмов планирования при всем этом "приоритетный с вытеснением". Мир ОС РВ выделяется большим числом разных алгоритмов планирования: динамические, монотонные, приоритетные, адаптивные и пр., задача ведь практически постоянно одна - дать инструмент, который разрешает в подходящий момент времени выполнять тот самый процесс, который нужен. Механизмы межзадачного взаимодействия. Иной набор механизмов РВ относится к средствам синхронизации процессов и передачи данных между ними, к таким механизмам можно отнести: семафоры, сигналы, мьютексы, события, каналы данных (pipes), средства для работы с разделяемой памятью, очереди событий и сообщений. Средства для работы с таймерами. Инструменты, такие как средства работы с таймерами, нужны для систем с строгим временным распорядком, потому развитость средств работы с таймерами - нужный атрибут ОС РВ. Данные средства, обычно, позволяют[6]: - определять и задавать разные промежутки времени (от 1 мкс и повыше), - генерировать прерывания по прошествии временных промежутков, - делать разовые и циклические будильники. 2 Архитектура ОС РВ. Классы ОС РВ По внутренней архитектуре ОС РВ делятся на монолитные ОС, ОС на основе микроядра и объектно-ориентированные ОС. 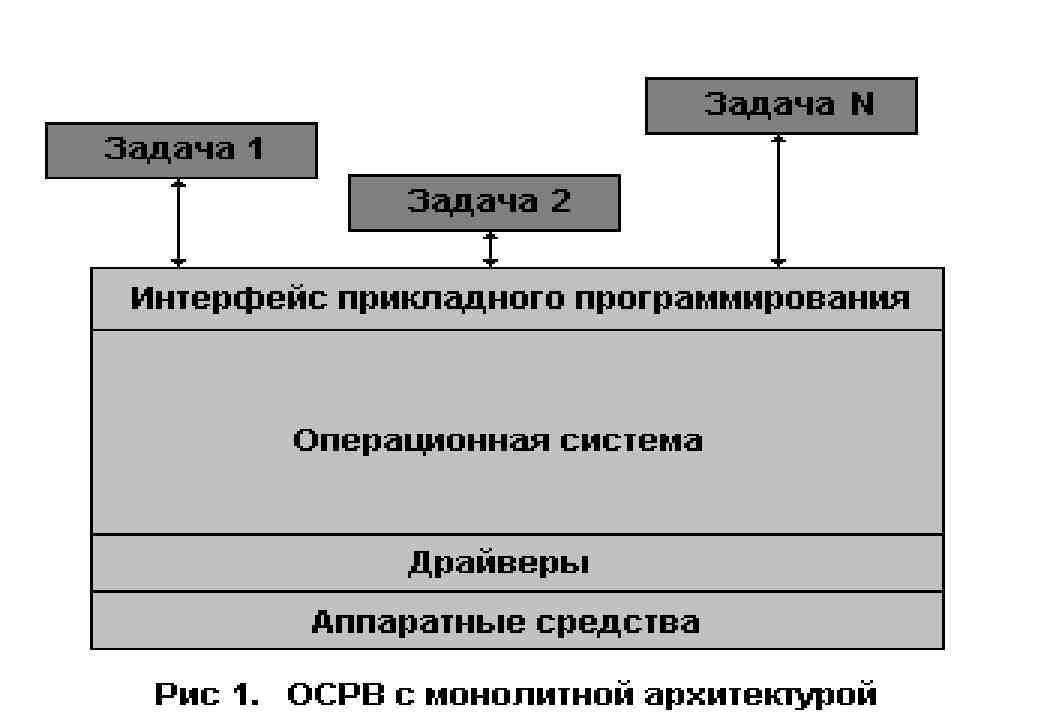 ОС РВ с монолитной архитектурой представляется в виде: Прикладного значения: состоит из работающих прикладных действий; Системного значения: состоит из цельного ядра ОС, в каком возможно выделить эти доли, так: - интерфейс между приложениями и ядром (API) о фактически ядро системы; - интерфейс между ядром и оборудованием (драйверы устройств). API в этих системах имеет раздвоенную роль: - управление взаимодействием прикладных действий и систем; - обеспечивание непрерывности исполнения кода системы. Основным превосходством монолитной архитектуры есть условная скорость работы, сравнивая с другими архитектурами. Недочеты монолитной архитектуры: Системные вызовы, требующие переключения значений преимуществ обязаны реализовывать API как прерывания либо ловушки. Данное существенно наращивает время их работы [10]. Ядро не имеет возможности быть прервано пользовательской задачей. Такое может привести к тому, что высокоприоритетная задача имеет возможность не обрести управление в связи работы низкоприоритетной. Сложность перенесения на новейший архитектуры микропроцессора в следствии значимых ассемблерных вставок. Негибкость и сложность становления: изменение доли ядра системы просит его абсолютной перекомпиляции. Модульная архитектура (на базе микроядра) возникла, как попытка убрать узкое место - API и упростить модернизацию системы и перенесение ее на новейшие микропроцессоры. API гарантирует взаимосвязь прикладных действий и особого модуля - менеджера процессов. Хотя микроядро имеет раздвоенную роль: - управление взаимодействием долей системы; - обеспечивание непрерывности исполнения кода системы. Недостатки у модульной архитектуры в основном такие же, что и у монолитной. Трудности можно решить, перейдя с значения API на уровень микроядра. Системный интерфейс все точно также не дозволяет переключения задач в период работы микроядра, лишь сократилось время присутствия в этом состоянии. API имеет возможность быть реализованной лишь на ассемблере, трудности с переносимостью микроядра стали меньше (в связи с уменьшением его объема), хотя все-таки сохранились [9].  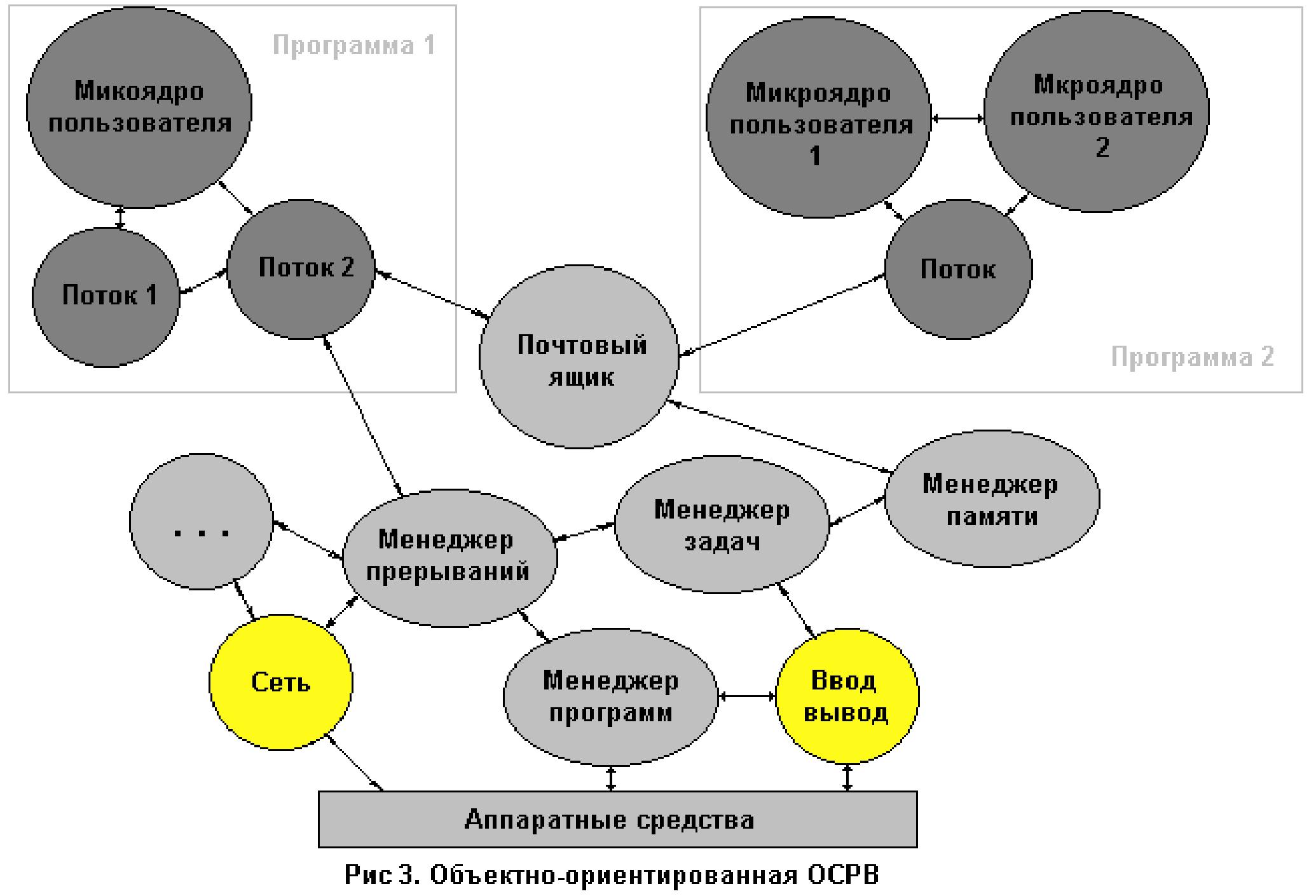 Сочетание объектно-ориентированных приложений и процедурных ОС имеет ряд недостатков: В общем работающем комплексе (приложение ОС РВ) различные составляющие употребляют разные подходы к исследованию ПО. Не употребляются все способности объектно-ориентированного подхода. Появляются маленькие утраты производительности из-за различного типа интерфейсов в ОС РВ и приложении. При всем этом появляется идея строить саму ОС РВ, используя объектно-ориентированный подход. Объектная архитектура на базе объектов-микроядер. В этой архитектуре API отсутствует вообще. Взаимодействие меж составляющими системы (микроядрами) и пользовательскими действиями исполняется посредством обычного вызова функций, так как и система, и приложения прописаны на одном языке (Для ОСРВ SoftKernel это C). Что даст наивысшую скорость системных вызовов [4]. 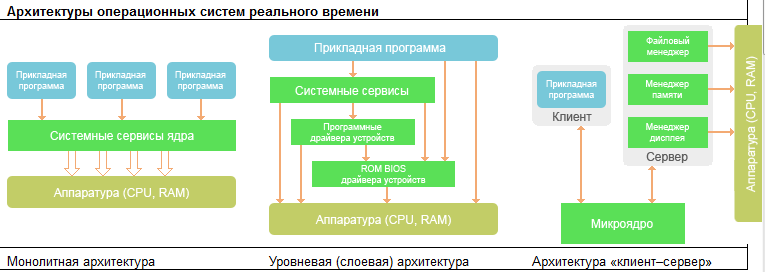 Рисунок 4 – Архитектура операционных систем реального времени Фактическое равноправие всех компонентов системы дает возможность переключения задач в любой интервал времени. Объектно-ориентированный подход обеспечивает модульность, безопасность, легкость модернизации и повторного использования кода. Микроядра по собственным чертам напоминают структуры, применяемые в иных ОС. Но есть и собственные отличия. Микроядра и модули. Почти все ОС поддерживают динамическую загрузку составляющих системы, именуемых модулями. Но модули не поддерживают объектно-ориентрованный расклад. Дальше, размен информацией с модулями случается средством системных вызовов, что довольно недешево [6]. Микроядра и драйверы. Почти все ОС поддерживают вероятность собственного расширения средством драйверов. Но, драйверы нередко обязаны быть статически соединены с ядром и обязаны действовать в привилегированном режиме. Дальше, как модули они не поддерживают объектно-ориентированный расклад и доступны приложению только посредством системных вызовов. Системы реального времени условно можно разделить на четыре группы (класса) [6]. 1-й класс: - исполнительные системы реального времени. Это программы для программируемых процессоров, встраиваемых в разные приспособления, слишком маленькие и традиционно прописаны на языке малого уровня на подобии ассемблера либо PLM. Внутрисхемные эмуляторы применимы для отладки, хотя высокоуровневые средства исследования и отладки программ не применимы. Операционная среда традиционно недосягаема. Показатели систем данного типа - разные платформы для систем исследования и выполнения. Приложение РВ разрабатывается на host- PC, потом компонуется с ядром и загружается в целевую систему для выполнения. В главном, приложение РВ - это одна задача и параллелизм тут достигается при помощи нитей (threads). Системы данного вида имеют ряд превосходств, среди которых главные - скорость и реактивность системы. Основная первопричина высочайшей реактивности систем данного вида - присутствие исключительно нитей и (потоков) и, как следует, маленькое время переключения контекста между ими (в отличие от процессов). С этим главным превосходством связан и ряд недочетов: зависание всей системы при зависании нити, трудности с динамической подгрузкой новейших приложений. 2-й класс: - минимальное ядро системы реального времени. На наиболее высочайшем уровне присутствуют СРВ, обеспечивающие наименьшую среду выполнения. Учтены только главные функции, а управление памятью и диспетчер нередко недоступны. Ядро представляет из- себя набор программ, выполняющих обычные, необходимые для интегрированных систем низкого уровня функции, такие, как операции с плавающей запятой и малый сервис ввода/вывода. Прикладная программа разрабатывается в инструментальной среде, а производится, обычно, на интегрированных системах. В данный класс входят системы с цельным ядром, где и находится реализация всех устройств РВ данных ОС. Системы такого класса, в главном, модульны, отлично структурированы, имеют более развитый набор специфических устройств РВ, малогабаритны и прогнозируемы. Более пользующиеся популярностью системы данного класса: OS9, QNX. Одной из отличительных черт систем этого класса - высочайшая степень масштабируемости. На базе данных ОС возможно выстроить как малогабаритные СРВ, так и огромные системы серверного класса. 3-й класс: ядро систем реального времени и инструментальная среда. Данный класс систем владеет широкими чертами ОС с полным обслуживанием. Исследование проводится в инструментальной среде, а выполнение - на целевых системах. Данный вид систем гарантирует еще более высочайший уровень сервиса для создателя прикладной программы. Сюда включены такие средства, как дистанционный символьный отладчик, протокол погрешностей и прочие средства CASE. Нередко доступно параллельное выполнение программ. 4-й класс: ОС с полным сервисом. Эти ОС имеют все шансы быть использованы в любых приложениях РВ. Разработка и исполнение прикладных программ проводятся в масштабах одной и той же системы. Область применения расширений РВ - огромные системы РВ, где потребуется визуализация, работа с базами этих, доступ в интернет и так далее [7]. Заключение Понятие режим РВ находится в тесной взаимосвязи с такими категориями как вычислительная система и ОС. Режимом РВ можно называть такой режим функционирования вычислительной системы, правильность работы в котором определяется не только логической корректностью вычислений, но и временем, требующимся для получения результата вычислений. Различают вычислительные СРВ двух типов – жесткая СРВ и мягкая СРВ. Жесткая СРВ не допускают никаких задержек реакции системы ни при каких условиях, так как: - результаты могут оказаться бесполезны в случае опоздания, - может произойти катастрофа в случае задержки реакции, - стоимость опоздания может оказаться бесконечно велика. Примерами жесткой СРВ есть системы оцифровки звука/изображения, встраиваемые контроллеры, бортовые системы управления, системы аварийной защиты, регистраторы аварийных событий. Мягкая СРВ определяется тем, что задержка реакции не критична, хотя и может привести к увеличению стоимости результатов и снижению производительности системы в целом. При этом допускается некоторый процент полученных с опозданием результатов, но обязательно ограничивается какой-либо другой параметр, например, максимально допустимая частота, минимальное время между двумя такими случаями опоздания или некоторая среднестатистическая величина, образованная от указанных. Основное отличие между системами мягкого и жесткого РВ можно назвать такие: жесткая СРВ никогда не опоздает с реакцией на событие, мягкая СРВ - не должна опаздывать с реакцией на событие. Простейшие СРВ основаны на прямом взаимодействии программ с аппаратным обеспечением, но многие задачи настолько сложны, что требуют для своей работы специальных средств управления – ОС РВ. ОС РВ - это такая система, которая может быть использована для построения систем жесткого РВ. Существуют два основных требования к ОС РВ: - система должна реагировать на события, успевая обработать их за фиксированное время или к фиксированному моменту времени. Возможность СРВ отвечать на внешние события в заданные временные рамки называется детерминизмом. - система должна обладать способностью к параллельной обработке нескольких событий. Если несколько событий наступают одновременно, система должна успеть обработать все события в соответствующих каждому событию временных рамках, независимо от количества событий, порядка их поступления и соотношения их временных рамок. Для выполнения этого требования система должна обладать естественным параллелизмом. То есть, что система должна поддерживать вытесняющую многозадачность, основанную на приоритетах, а также быть способной использовать несколько процессоров одновременно. Предметом исследования и темой данной работы было изучение основных понятий систем реального времени, и изучение механизмов работы и характеристик СРВ. В процессе выполнения работы, были решены следующие цели и задачи, которые заключались в следующем: - расширение, закрепление и систематизация теоретических знаний по изучаемой дисциплине; - формирование и совершенствование практических навыков учебно-исследовательской деятельности; - формирование навыков ведения самостоятельных теоретических и практических исследований; - приобретение опыта обработки, анализа и систематизации результатов практических (экспериментальных) исследований по дисциплине; - формирование навыков работы с научной литературой, со справочниками и другими информационными источниками, в том числе электронными ресурсами; - формирование навыков правильного оформления учебно-исследовательской работы. - формирование навыков научно оформлять и излагать свои мысли, выводы и результаты исследования. Список использованной литературы 1. K.Clohessy, "Using object-oriented programming tools to build real-time embedded systems", Real-time engineering, 2009/Fall 2. V.Encontre, "How to use modeling to implement verifiable, scalable, and efficient real-time application programs", Real-time engineering, 2010/Fall 3. W. Yuan, K. Nahrstedt. Energy-Efficient Soft Real-Time CPU Scheduling for Mobile Multimedia Systems. ACM Symposium on Operating Systems Principles (SOSP), 2011. 4. Бетелин В.Б., В.А.Галатенко "ЭСКОРТ - инструментальная среда программирования.", Юбилейный сборник трудов институтов Отделения информатики РАН. Том. II. Москва, 2013. 5. Бурдонов И.Б., А.С. Косачев, В.Н. Пономаренко: «Системы реального времени». - Москва, 2010. – 76 с. 6. Жданов А. «Операционные системы реального времени». «PC Week», №8, 2009 г. 7. Климентьев К. Е. Системы реального времени: обзорный курс лекций/ К.Е. Климентьев. - Самара: Самар. гос. аэрокосм. ун-т. Самара, 2012. – 45 с. 8. Коваленко И. Б. «Проект "Neutrino": Системы реального времени: «Открытые системы», №5, 2010 г. 9. Никольский С. А. «Особенности национальной автоматизации». «Компьютерра», №24, 2011 г. 10. Олифер В.Г., Олифер Н.А. Сетевые операционные системы: Учебник для вузов. 2-е изд.- СПБ.: Питер, 2009. – 669 с.: ил. 11. Сорокин С.В. «Системы Реального Времени» // СТА. – 2011. – No4. – С22-39. 12. Интернет ресурс: http://citforum.ru/programming |