Доклад БПЛА. Воробьев М. Ба22-20. Основные типы конструкций бортовых систем и оборудования полезной нагрузки по дисциплине "Электронные системы функциональной полезной нагрузки беспилотного воздушного судна и систем крепления внешних грузов"
 Скачать 490.61 Kb. Скачать 490.61 Kb.
|

|
ДЕПАРТАМЕНТ ОБРАЗОВАНИЯ И НАУКИ ГОРОДА МОСКВЫ Государственное бюджетное профессиональное образовательное учреждение города Москвы «МОСКОВСКИЙ КОЛЛЕДЖ БИЗНЕС-ТЕХНОЛОГИЙ» (ГБПОУ КБТ) ПРОЕКТ на тему: «Основные типы конструкций бортовых систем и оборудования полезной нагрузки» по дисциплине: “Электронные системы функциональной полезной нагрузки беспилотного воздушного судна и систем крепления внешних грузов” СПЕЦИАЛЬНОСТЬ: 25.02.08 “Эксплуатация беспилотных авиационных систем” ГРУППА: БА22-20 Исполнитель: Воробьев М.Е. Руководитель: Казаков Н.И. Москва 2022 Список сокращений БПЛА - беспилотный летательный аппарат ЛА - летательный аппарат БВС - беспилотное воздушное судно ГНСС - глобальная навигационная спутниковая система МЭМС - микроэлектромеханические системы КПД - коэффициент полезного действия ДВС - двигатель внутреннего сгорания Содержание Введение 4 Основная часть 5 ГСП «РАКУРС-НАДИР2» 6 ГСП «РАКУРС-ВН2» 7 ГСП «РАКУРС-ВН3» 8 БОРТОВОЕ РАДИОЭЛЕКТРОННОЕ ОБОРУДОВАНИЕ 9 Заключение 14 Введение Беспилотные летательные аппараты уже используются во многих сферах нашей жизни, и для расширения их возможностей используют разнообразное бортовое оборудование, иначе полезную нагрузку. Полезной нагрузкой могут быть: • Мультиспектральные камеры • Тепловизорами • Инфракрасные камеры • Аппаратура лазерной подсветки цели • Аппаратура для видео и фотосъемки • Навигационная аппаратура и т.д. Благодаря использованию бортового оборудования мы можем использовать дроны для тушения лесных пожаров, в военное сфере, геодезии и множестве других областях промышленности и науки. Полезная нагрузка для БПЛА совершенствуется и развивается вместе с ними, давая нам перспективы для внедрения дронов во все новые и новые сферы нашей жизни. Таким образом, мы видим важность изучения данной темы, что и является целью данного проекта. Для достижения поставленной цели мы соберем информацию из различных источников, исследуем ее и на основании полученных знаний сможем узнать о бортовом оборудовании дронов немного больше. Основная часть Полезная нагрузка для БПЛА Беспилотники самолетного, вертолётного и мультироторного типа в общем случае являются универсальной платформой, не привязаной к определённым задачам. Полезная или целевая нагрузка для БПЛА определяется поставленными задачами. Для задач геодезии и картографии используется калибровочнная цифровая фотокамера с центральным затвором и мультисистемным или мультичастотным ГНСС приёмником. Для задач сельского хозяйства используются мультиспектральные и гиперспектральные камеры. Для задач мониторинга нефте и газопроводов используются камеры с многократным зумом, тепловизорами и газоанализаторами. Для получения высокоточных трехмерных моделей и точного рельефа используются лидары и лазерные сканеры. Для геологоразведки используются подвесные магнитометры.  Рис 1. ГСП «РАКУРС-НАДИР2»НазначениеПредназначена для трехосевой стабилизации оптической оси фотокамеры при выполнении аэрофотосъемочных работ. Решаемые задачи.Компенсация изменений крена и тангажа, а также угла сноса Аэрофотосъемка Высокоточная привязка центров фотографирования Основные потребительские свойстваЛинейка устанавливаемых фотокамер Возможность установки ГНСС приёмника геодезического класса Ключевые особенностиКомпенсация эволюций БПЛА производится также и по углу сноса Возможность применения полноформатной цифровой камеры с центральным затвором  Рис 2. ГСП «РАКУРС-ВН2»НазначениеПредназначена для стабилизации заданных углов ориентации при осуществлении визуального наблюдения в реальном времени. Решаемые задачи.Визуальное наблюдение Видеосъемка Тепловизионная съемка Основные потребительские свойстваКомбинирование видеоканала и тепловизора с одновременной и переключаемой трансляцией каналов Наличие одной программной и двух аппаратных осей стабилизации для улучшения восприятия видеоматериалов Ключевые особенностиСовмещение видеокамеры и тепловизора в одной полезной нагрузке Использование камеры с увеличением до 20х  Рис 2. ГСП «РАКУРС-ВН3»НазначениеПредназначена для стабилизации заданных углов ориентации при осуществлении визуального наблюдения в реальном времени. Решаемые задачи.визуальное наблюдение; видеосъемка. Основные потребительские свойстваНаличие трех аппаратных осей стабилизации для улучшения восприятия видеоматериалов Выходной сигнал в форматах: аналоговый, RTP h264 через UDP, Ethernet Ключевые особенностиКамера с разрешением FULL HD (1920х1080) и с зумом до 20х Относительная точность стабилизации по всем осям не более 1-2° Алгоритмы стабилизации: демпфирование, стабилизация оптической оси по угловой скорости и удержание заданного угла в земных координатах БОРТОВОЕ РАДИОЭЛЕКТРОННОЕ ОБОРУДОВАНИЕ Существует множество разных БПЛА, но в каждом из них обязательно есть: Автопилот Датчики Система навигации Канал связи Источник энергии Двигательная установка Далее мы будем рассматривать устройство возвращаемых легких БПЛА малого радиуса действия (до 50 кг, до 70 км). Определим функции, которые выполняет каждый компонент. АВТОПИЛОТ Автопилот является программно-аппаратным комплексом и выполняет несколько функций: Оценка положения и параметров движения БПЛА в пространстве Управление исполнительными механизмами и двигательной установкой Информационный обмен с пунктом управления НАБОР ДАТЧИКОВ Набор инерциальных датчиков и спутниковая навигационная система передают данные для оценки положения в пространстве. Инерциальные датчики измеряют угловые скорости аппарата и линейные ускорения, навигационная система определяет координаты БПЛА. Для малых БПЛА в качестве инерциальных датчиков часто используют МЭМС с тремя датчиками угловых скоростей и тремя акселерометрами, чувствительные оси которых расположены ортогонально. Стандартная навигационная система — приемник Глобальной навигационной спутниковой системы (ГНСС) GPS и Глонасс. Данные обрабатываются определенным алгоритмом и получаются углы установки БПЛА — крен, тангаж, угол рыскания, широта, долгота, высота, курс. Если БПЛА самолетного типа, то ему также необходим датчик воздушной скорости для оценки скорости аппарата относительно воздушной массы. А для квадрокоптера и вертолета нужен магнитометр для определения угла рыскания. Дополнительных датчиков, которые могут обслуживать полет БПЛА, довольно много — барометрический высотомер, лазерный и ультразвуковой дальномер, лазерный сканер, малогабаритная РЛС, стереокамеры, системы оптического потока и прочее — все находят применения для адаптации БПЛА к более сложным условиям полета. Бывает необходимо огибать непредвиденные препятствия по ходу маршрута, приземлиться с точностью до нескольких сантиметров, следовать на строго определенной высоте над подстилающей поверхностью. Сигналы с датчиков обрабатывается в соответствии с определенными алгоритмами для того, чтобы быть пригодными для работы автопилота. Эти алгоритмы в виде программного кода могут быть реализованы в отдельных электронных блоках или в самом автопилоте. Вычислив положение и параметры движения в пространстве, автопилот управляет двигательной установкой и исполнительными механизмами так, чтобы вести БПЛА по требуемой траектории. А она закладывается в память автопилота при составлении полетного задания. ИСТОЧНИКИ ЭНЕРГИИ Источник энергии необходим для работы двигательной установки. Одной из самых важных характеристик БПЛА является продолжительность полета. А она напрямую зависит от количества доступной энергии на борту и эффективности ее использования. Сейчас наиболее широко распространены два варианта: бензин и аккумуляторные батареи. Кроме того, иногда используют топливные элементы, газ, керосин, дизельное топливо. Для сравнения используем такую характеристику, как плотность энергии на единицу массы. 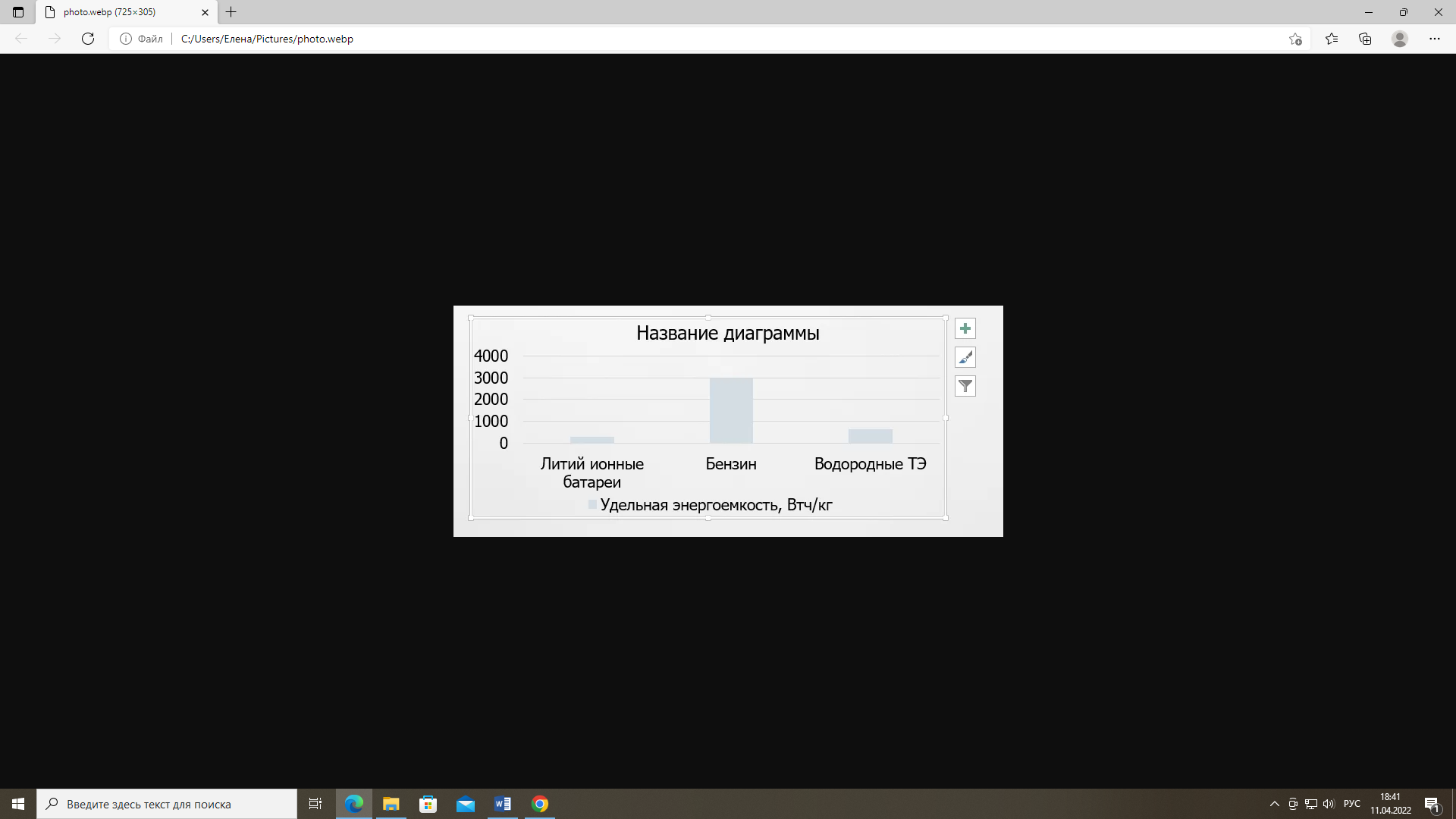 По диаграмме видно, что топливо обладает большей энергоемкостью по сравнению с аккумуляторными батареями, но итоговая эффективность использования будет определяться двигателем. ДВИГАТЕЛЬНЫЕ УСТАНОВКИ Двигательная установка преобразует энергию источника в механическую, непосредственно приводя в движение БПЛА. Двигательную установку можно разделить на непосредственно двигатель и системы, обеспечивающие его работу. В рассматриваемом классе БПЛА чаще всего используются синхронные электродвигатели с постоянными магнитами и поршневые внутреннего сгорания. Иногда используют реактивные двигатели. 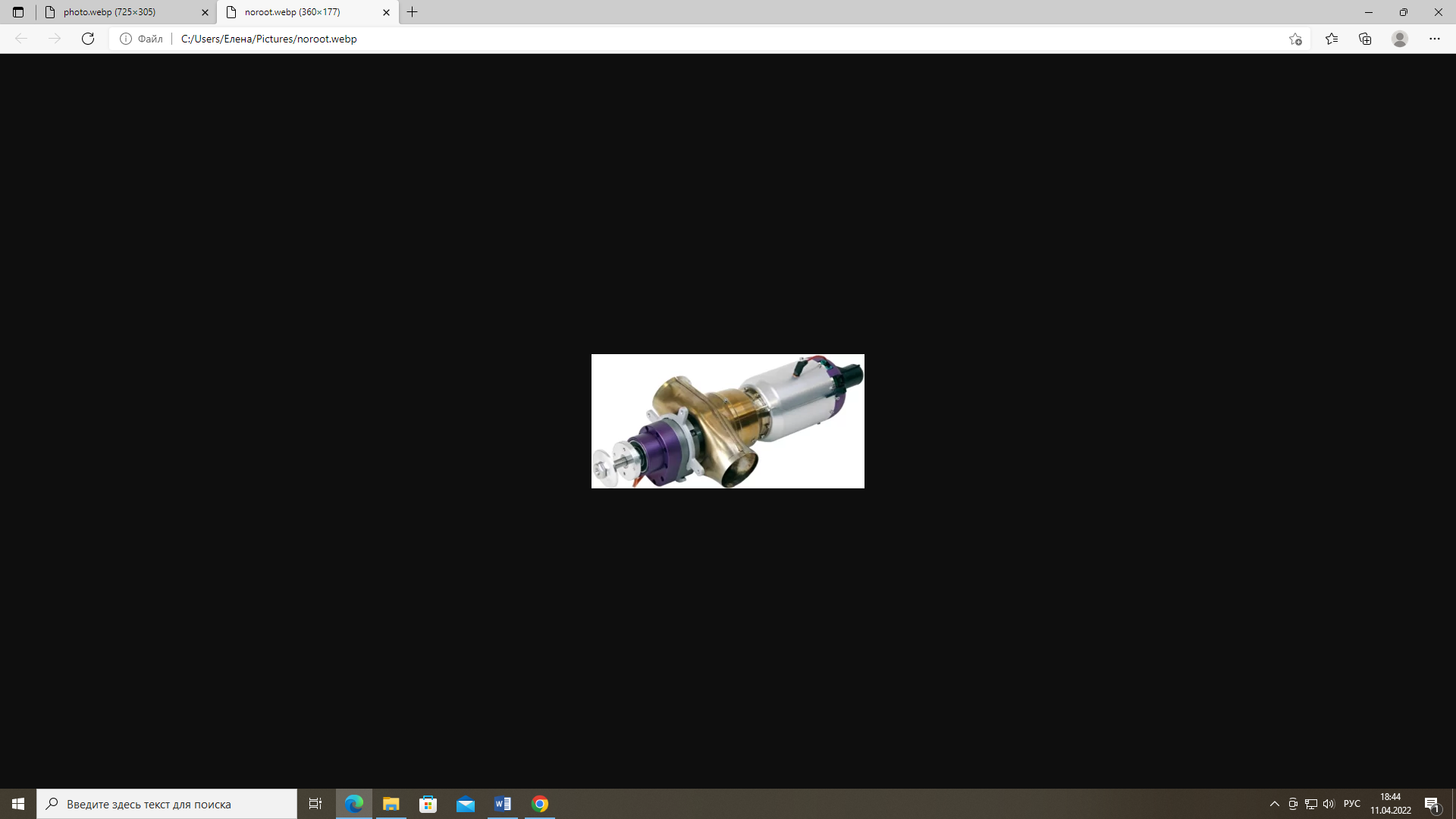 Работу бесколлекторного двигателя обеспечивает специальный электронный блок — инвертор (он же регулятор хода, он же драйвер). Для нормальной работы двигателей, работающих на жидком топливе, нужна система подачи топлива и электронный блок управления. КПД электрической установки довольно высок — более 80 %. В то же время на них возможно создавать БПЛА самых малых размеров. Системы на ДВС имеют низкий КПД и более высокую минимальную массу, но благодаря высокой энергоемкости топлива позволяют строить БПЛА с гораздо большей длительностью полета (диаграмма сравнения нескольких БПЛА одного типа по времени полета). КАНАЛ СВЯЗИ Канал связи необходим для обмена информацией с пунктом управления. Информация от БПЛА к пункту управления — параметры полета, состояние различных узлов и агрегатов, подтверждение принятой от пункта управления информации, небольшой объем данных с полезной нагрузки передается по узкополосному каналу связи. Большой объем данных от полезной нагрузки (например, фото и видео) передаются с помощью широкополосного канала. От пункта управления к БПЛА передаются команды управления БПЛА и полезной нагрузки и изменения полетного задания. Чаще радиоканал является дуплексным или полудуплексным, может быть широкополосным и узкополосным. Архитектура радиоканала может быть разнообразной — от «точка-точка» до «mesh». Для использования БПЛА в условиях города и на небольших высотах имеет смысл использовать инфраструктуру сотовой связи. Для повышения надежности радиосвязи можно использовать несколько каналов одновременно, применяя разные диапазоны и архитектуры. Перейдем к управлению движением беспилотника. Коптер может поворачиваться и наклоняться при изменении скоростей вращения винтов, у самолета для этого есть аэродинамические поверхности — элероны, рули высоты, киль. Вертолет использует автомат перекоса для крена и тангажа и хвостовой ротор для изменения угла рыскания. Заключение На сегодняшний день БПЛА для аэрофотосъемки — это в основном легкие аппараты из классов «микро» до 5 кг и «мини» до 30 кг. Результаты аэрофотосъемки с БПЛА могут применяться в разных областях, таких как рекламная съемка объектов недвижимости, различный мониторинг (экологический, сельскохозяйственный) и т.д. Выполнение аэрофотосъемки с целью профессионального картографирования предъявляет повышенные требования к выходным данным, а именно к выдерживанию геометрических параметров съемки. Небольшие БПЛА экономичны в эксплуатации и портативны, однако менее стабильны с этой точки зрения. Как следствие, блоки снимков, полученные с БПЛА, обладающие отличной детальностью, яркостью и контрастом могут иметь низкое фотограмметрическое качество с точки зрения традиционных фотограмметрических пакетов. Широкое применение беспилотников для профессиональной картографической аэрофотосъемки возможно при консолидации усилий как производителей БПЛА (в том числе производителей полноценного бортового оборудования), так и разработчиков профессионального фотограмметрического программного обеспечения. С одной стороны, должно повышаться качество съемки, с другой стороны программные пакеты должны быть доработаны в сторону снижения требований к входным данным в случае работы со снимками, полученными с БПЛА. |