херня. мпс3. Основные виды микропроцессорных систем (мпс) и их особенности
 Скачать 382.8 Kb. Скачать 382.8 Kb.
|

|
Основные виды микропроцессорных систем (МПС) и их особенности. Микроконтроллеры (МК) предназначены для сбора информации, контроля и управления производственными и другими объектами. Разработаны с ориентацией на конкретную область применения в качестве встраиваемых приборов. Это определило их аппаратную реализацию, отличающуюся функциональной завершенностью, малыми габаритами и энергопотреблением, значительным числом портов для подключения внешних устройств, а также наличием специальных устройств — контроллеров обмена данными, генераторов и таймеров, аналого-цифровых преобразователей (АЦП), блоков автономного электропитания. Микроконтроллеры имеют архитектурные отличительные признаки: упрощенный сравнительно небольшой набор команд, незначительную емкость ОЗУ. МикроЭВМ (микрокомпьютер) представляет собой конструктивно завершенную микропроцессорную систему, оснащенную устройствами связи с внешней аппаратурой, панелью управления, собственным источником электропитания и комплектом программного обеспечения, которая предназначена для широкого класса задач обработки массивов данных. Компьютеры и самые распространенные из них — персональные компьютеры — это самые универсальные из микропроцессорных систем. Они обязательно предусматривают возможность модернизации, а также широкие возможности подключения новых устройств. Их системная шина доступна пользователю. Кроме того, внешние устройства могут подключаться к компьютеру через несколько встроенных портов связи (число портов доходит иногда до 10). Компьютер имеет сильно развитые средства связи с пользователем, средства длительного хранения информации большого объема, средства связи с другими компьютерами по информационным сетям. Области применения компьютеров могут быть самыми разными: математические расчеты, обслуживание доступа к базам данных, управление работой сложных электронных систем, подготовка документов, компьютерные игры и т.д. Обобщенная структура МПС. Основные характеристики и параметры МПС.  Краткая характеристика возможностей МПС. Применение МПС. Микропроцессорные системы предназначены для автоматизации обработки информации и управления различными процессами. применения МПС: системы управления; контрольно-измерительная аппаратура; техника связи; бытовая и торговая аппаратура; транспорт; военная техника; вычислительные машины, системы, комплексы и сети. Параметры цифровых устройств. Особенности применения цифровых устройств серии ТТЛ в МПС Основными параметрами логических элементов и цифровых устройств являются функциональные, статические, динамические. \Функциональные параметры определяют логические возможности узла или устройства. \К статическим параметрам относят входные и выходные токи и напряжения \К динамическим параметрам относятся: t01 -время перехода из состояния логического 0 в состояние логической 1; t10 — время перехода из состояния логической 1 в состояние логического 0; Параметры цифровых устройств. Особенности применения цифровых устройств серии КМОП в МПС. Первой и основной особенностью КМОП микросхем является большое входное сопротивление этих микросхем. В результате на вход этой цифровой микросхемы может наводиться любое паразитное напряжение, в том числе и равное половине напряжения питания, и храниться на нем достаточно долго. Второй особенностью КМОП микросхем является то, что они могут работать при отключенном питании (если подавать на входы этих микросхем логические сигналы). Однако работают они в таком режиме чаще всего неправильно. Эта особенность связана с конструкцией входного каскада КМОП микросхем. К  омбинационные цифровые устройства МПС. Дешифратор. Шифраторы. омбинационные цифровые устройства МПС. Дешифратор. Шифраторы.Под комбинационным цифровым устройством (КЦУ) понимается цифровое устройство, обеспечивающее преобразование совокупности N входных цифровых сигналов в M выходных, при этом состояние выходных сигналов в данный момент времени определяется состоянием входных сигналов в этот же момент времени. Иными словами, КЦУ «не помнит» предыстории поступления сигналов на его входы. Правила функционирования КЦУ определяются реализуемыми ими функциями алгебры логики. Дешифратор – это комбинационный узел, преобразующий двоично-позиционный код в код 1 из N. Код 1 из N содержит одну и только одну 1, остальные комбинации запрещенные. Шифраторы (кодеры) – устройства, предназначенные для преобразования алфавитно-цифровой информации, поданной унитарным n-разрядным кодом в эквивалентный двоичный m-разрядный код. Особенностью унитарного кода является активное состояние только одной переменной Xi входного набора {Xn-1…X1 X0}, порядковый номер i которой подлежит кодированию.  К 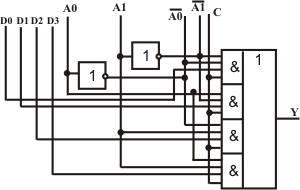 омбинационные цифровые устройства МПС. Мультиплексоры. Демультиплексоры. омбинационные цифровые устройства МПС. Мультиплексоры. Демультиплексоры.Мультиплексор - это устройство, которое осуществляет выборку одного из нескольких входов и подключает его к своему единственному выходу, в зависимости от состояния двоичного кода. Другими словами, мультиплексор - переключатель сигналов, управляемый двоичным кодом и имеющий несколько входов и один выход. К выходу подключается тот вход, чей номер соответствует управляющему двоичному коду. мультиплексор - это устройство, преобразующее параллельный код в последовательный. Д  емультиплексор - устройство, обратное мультиплексору. Т. е., у демультиплексора один вход и много выходов. Двоичный код определяет, какой выход будет подключен ко входу. емультиплексор - устройство, обратное мультиплексору. Т. е., у демультиплексора один вход и много выходов. Двоичный код определяет, какой выход будет подключен ко входу.Другими словами, демультиплексор - это устройство, которое осуществляет выборку одного из нескольких своих выходов и подключает его к своему входу или, ещё, это переключатель сигналов, управляемый двоичным кодом и имеющий один вход и несколько выходов. Цифровые устройства МПС последовательностного типа. RS-триггеры. D-триггеры. В Простой RS-триггер использует особый принцип работы, основанный на получении входных сигналов, которые в зависимости от поставленной задачи изменяют состояние выходов устройства. При входе сигнала на основной блок, на выходах происходит скачкообразное изменение напряжения, вследствие чего осуществляется управление поставленной задачей. Интегральным D-триггером называется триггер с одним сигнальным и одним тактовым входом. Т  акие тригг1еры носят другое название - триггер задержки. акие тригг1еры носят другое название - триггер задержки.D-триггеры предназначены для выполнения следующих основных операций: запоминание информации; задержка логических сигналов; счет поступающих импульсов. D-триггеры являются синхронными триггерами и классифицируются по количеству тактов работы о 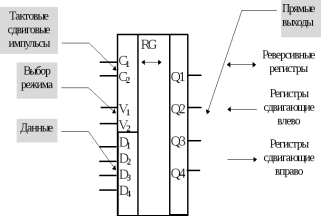 днотактный днотактныйдвухтактный (2х ступенчатый). Цифровые устройства МПС последовательностного типа. Регистры. Счетчики. Регистр – цифровой автомат, предназначенный для приема, запоминания и выполнения определённых операций. Назначение регистров. Основным назначением регистров является: временное хранение двоичного числа; сдвиг числа (как в микрокалькуляторе); выполнение логических операций (сложение, умножение, преобразование кода); С  четчиком называют устройство, сигналы, на выходе которого в определенном коде четчиком называют устройство, сигналы, на выходе которого в определенном кодеотображают число импульсов, поступивших на его вход. Примером простейшего счетчика, cчитающего до 2 является Т - триггер. Счетчик, образованный из Т - триггеров сможет подсчитать в двоичном коде Цифровые устройства МПС. Триггеры. Т-триггер. JK-триггер. ТриггерыИнтегральные триггеры обычно реализуются на логических элементах И-НЕ, ИЛИ-НЕ. Триггер предназначен для хранения значения одной логической переменной (или значения одноразрядного двоичного числа; при хранении многоразрядных двоичных чисел для запоминания значения каждого разряда числа используются отдельный триггер). В соответствии с этим, триггер имеет два состояния: одно из них обозначается как состояние 0, другое – как состояние 1. Воздействуя на входы триггера, его устанавливают в нужное состояние. Т  риггер имеет два выхода: прямой Q и инверсный риггер имеет два выхода: прямой Q и инверсный T-триггер — это счетный триггер. У данного триггера имеется только один вход. Принцип работы T-триггера заключается в следующем. После поступления на вход T импульса, состояние триггера меняется на прямо противоположное. Счётным он называется потому, что T триггер как бы подсчитывает количество импульсов, поступивших на его вход. Жаль только, что считать этот триггер умеет только до одного. При поступлении второго импульса T-триггер снова сбрасывается в исходное состояние. JK-триггер — это универсальный триггер, на базе которого можно реализовать любой из рассмотренных ранее триггеров.  Цифровые устройства МПС. Характеристики АЦП и ЦАП. Особенности аналогоцифрового и цифроаналогового преобразования. Аналого-цифровые преобразователи (АЦП) являются устройствами, которые принимают входные аналоговые сигналы и генерируют соответствующие им цифровые сигналы, пригодные для обработки микропроцессорами и другими цифровыми устройствами.  Цифро-аналоговый преобразователь (ЦАП) предназначен для преобразования числа, определенного, как правило, в виде двоичного кода, в напряжение или ток, пропорциональные значению цифрового кода. Цифро-аналоговый преобразователь (ЦАП) предназначен для преобразования числа, определенного, как правило, в виде двоичного кода, в напряжение или ток, пропорциональные значению цифрового кода.Цифровые устройства МПС. Генераторы. Мультивибраторы. Особенности кварцевой стабилизации частоты генераторов. Мультивибраторы применяются для генерирования прямоугольных импульсов в тех случаях, когда нет жестких требований ких длительности и частоте повторения. Кварцевый резонатор применяется в гетеродинах радиоприемников в качестве частотозадающего колебательного резонансного LC контура. Благодаря малым потерям энергии в данном резонаторе удается достигнуть добротности порядка нескольких тысяч. Классификация устройств памяти. Постоянные запоминающие устройства (ПЗУ). Статические оперативные запоминающие устройства (ОЗУ). Flash- и EEPROM-память ПЗУ (flash)— это энергонезависимая память, в которой хранятся программы для микроконтроллеров и DSP. ПЗУ используются вместо винчестеров в смартфонах и бытовой технике. Записанная информация в нем сохраняется даже при выключении питания. Предназначены для запоминания постоянной информации (ПЗУ). ОЗУ (RAM — random access memory — память с произвольным доступом), т.к. и  нформация в нем сохраняется все время, пока к микросхеме ОЗУ подключено питание. В нформация в нем сохраняется все время, пока к микросхеме ОЗУ подключено питание. Вотличие от статической ОЗУ в микросхемах динамического ОЗУ постоянно требуется регенерировать их содержимое, иначе информация будет испорчена. EEPROM — это энергонезавимая память с электрическим стиранием информации. Количество циклов записи-стирания в этих микросхемах достигает 1000000 раз. Заминающие ячейки в них, также как и в постоянных запоминающих устройствах с электрическим стиранием EPROM, реализуются на основе транзисторов с плавающим затвором. FLASH - ПЗУ отличаются от ЭСППЗУ тем, что стирание производится не каждой ячейки отдельно, а всей микросхемы в целом или блока запоминающей матрицы этой микросхемы, как это делалось в РПЗУ. Обобщенная структурная схема МПС. Алгоритм работы. Классификация и характеристики микропроцессоров. Микропроцессор (МП) - это программно-управляемое электронное цифровое устройство, предназначенное для обработки цифровой информации и управления процессом этой обработки, выполненное на одной или нескольких интегральных схемах с высокой степенью интеграции электронных элементов. Классификация микропроцессоров 1. По числу БИС: - Однокристальные. Весь микропроцессор размещен на одном кристалле в одной микросхеме (chip). - Многокристальные (multi-chip). В этом случае различные блоки МП размещены на разных кристаллах. Тем самым можно повысить выход годных изделий, повышается тестируемость и ремонтопригодность МП. 2. По назначению: - Универсальные микропроцессоры могут быть применены для решения широкого круга разнообразных задач. При этом их эффективная производительность слабо зависит от проблемной специфики решаемых задач. Специализация МП, т.е. его проблемная ориентация на ускоренное выполнение определенных функций позволяет резко увеличить эффективную производительность при решении только определенных задач. - специализированные микропроцессоры 3. По виду обрабатываемых сигналов: - Цифровые – т.е. работающие с числовыми данными. - Аналоговые – предназначены для обработки аналоговых сигналов и имеющие в качестве входных и выходных данных аналоговые сигналы. 4. По количеству выполняемых программ: - Однопрограммные (однозадачные) – предназначены для выполнения только одной задачи. Таковыми являются все микроконтроллеры и часть специализированных МП. Их можно разделить еще на две группы: - Не загружаемые МП, единственная программа которых записана в постоянном запоминающем устройстве (ПЗУ) МП. Так делается, например в микроконтроллерах. - Загружаемые МП, у которых основная программа может загружаться из внешних устройств через интерфейсы . Таким внешним устройством может быть и дисковод, и другой МП , и специальное ПЗУ . - Много- или мультипрограммные микропроцессоры одновременно выполняют несколько (обычно несколько десятков) программ. Организация мультипрограммной работы микропроцессорных управляющих систем позволяет осуществить контроль за состоянием и управлением большим числом источников или приемников информации. Важнейшими характеристиками микропроцессора являются: 1) тактовая частота. Характеризует быстродействие компьютера. Режим работы процессора задается микросхемой, называемой генератором тактовых импульсов. На выполнение процессором каждой операции отводится определенное количество тактов. Тактовая частота указывает, сколько элементарных операций выполняет микропроцессор за одну секунду. Тактовая частота измеряется в МГц; 2) разрядность процессора — это максимальное количество разрядов двоичного числа, над которым одновременно может выполняться машинная операция. Чем больше разрядность процессора, тем больше информации он может обрабатывать в единицу времени и тем больше, при прочих равных условиях, производительность компьютера; 3) адресное пространство. Каждый конкретный процессор может работать не более чем с определенным количеством оперативной памяти. Максимальное количество памяти, которое процессор может обслужить, называется адресным пространством процессора. Определяется адресное пространство разрядностью адресной шины. 16. Принцип работы микропроцессора. Системная шина. Адресное пространство. Назначение микропроцессора заключается в считывании каждой команды из памяти, ее декодировании и выполнении. ЦПУ обрабатывает данные согласно инструкциям программы в форме логических и арифметических операций. Информация извлекается из памяти или поступает из устройства ввода, и результат обработки сохраняется в памяти или доставляется на соответствующее устройство вывода так, как это указано в командах. Вот что такое микропроцессоры. Для выполнения всех указанных функций у них имеются различные функциональные блоки. Такая внутренняя или организационная структура ЦПУ, определяющая его работу, называется его архитектурой. Системная шина-это единая компьютерная шина, соединяющая основные компоненты компьютерной системы, сочетающая в себе функции шины данных для передачи информации, адресной шины для определения того, куда она должна быть отправлена или считана, и шины управления для определения ее работы. Адресное пространство — это просто диапазон адресов, обозначающих определенное место в памяти. Адресные пространства разделают на три разновидности: физическое адресное пространство линейное адресное пространство логическое адресное пространство Подключение внешних устройств к микропроцессору. Применение последовательных портов в МПС. Внешними устройствами называются любые устройства, которыми управляет или которым передает информацию микропроцессор или устройства от которых он получает информацию. В качестве внешних устройств может выступать принтер или дисплей клавиатура или модем, но для устройств связи в качестве внешних устройств чаще выступают микросхемы приемников, передатчиков (в том числе построенные на базе сигнальных процессоров), синтезаторов частоты или электрически стираемые постоянные запоминающие устройства. В  качестве простейшего индикатора рассмотрим светодиодный индикатор. Транзистор служит для увеличения тока параллельного порта, при помощи которого микропроцессор зажигает и гасит светодиодный индикатор. Кроме того, транзистор позволяет согласовать уровни напряжения, необходимые для работы цифровых микросхем, к которым относятся и микропроцессорные устройства и уровни напряжения, необходимые для работы светодиодного индикатора. Гальванической развязки транзисторный ключ не обеспечивает. Простой светодиодный индикатор позволяет отображать двоичную информацию, такую как включено или выключено устройство, есть или нет сигнала и т.д. Для отображения цифровой информации используются семисегментные индикаторы.. Практически так же выглядят схемы индикаторов на газоразрядных лампах и лампах накаливания (для лампы накаливания не нужен токоограничивающий резистор). качестве простейшего индикатора рассмотрим светодиодный индикатор. Транзистор служит для увеличения тока параллельного порта, при помощи которого микропроцессор зажигает и гасит светодиодный индикатор. Кроме того, транзистор позволяет согласовать уровни напряжения, необходимые для работы цифровых микросхем, к которым относятся и микропроцессорные устройства и уровни напряжения, необходимые для работы светодиодного индикатора. Гальванической развязки транзисторный ключ не обеспечивает. Простой светодиодный индикатор позволяет отображать двоичную информацию, такую как включено или выключено устройство, есть или нет сигнала и т.д. Для отображения цифровой информации используются семисегментные индикаторы.. Практически так же выглядят схемы индикаторов на газоразрядных лампах и лампах накаливания (для лампы накаливания не нужен токоограничивающий резистор).При синхронном методе передатчик генерирует две последовательности – информационную и синхроимпульсы, которые передаются на приемник по разным линиям. Синхроимпульсы обеспечивают синхронизацию передаваемых бит, а начало передачи отмечается по-разному. При организации внешней синхронизации сигнал начала передачи генерируется передатчиком и передается на приемник по специальной линии. Асинхронный способ обеспечивает передачу информации по единственной линии. Для надежной синхронизации обмена в асинхронном режиме Подключение внешних устройств к микропроцессору. Применение параллельных портов в МПС Параллельный порт предназначен для обмена информацией с внешними устройствами, когда информация поступает в/из МПС в виде сигналов уровня 0 или 1 одновременно по восьми проводам (1 байт информации). К параллельному порту чаще всего подключают печатающие устройства (принтеры). Подключение внешних устройств к микропроцессору. Суммирующие и вычитающие таймеры. Реверсивные таймеры. Таймеры предназначены для формирования временных интервалов, позволяя микропроцессорной системе (компьютеру или микроконтроллеру) работать в режиме реального времени. Если в таймере, задающем системное время микропроцессора, используется суммирующий счётчик, то таймер называется суммирующим. Если в схеме таймера используется вычитающий счётчик, то таймер называется вычитающим. Классификация микроконтроллеров. Архитектура микроконтроллеров. Классификация МКо разрядности шины данных ЦПУ: .4-битные .8-битные .16-битные .32-битные В общем случае понятие архитектуры МК отражает следующие наиболее важные компоненты: систему команд и форматы их представления; организацию памяти и структуру адресного пространства; способы представления данных; структуру МК как совокупность модулей и связей между ними; способы обращения ко всем элементам структуры (адресация к регистрам, ячейкам постоянной и оперативной памяти, функциональным модулям и внешним устройствам); систему обработки прерываний. 21. Обобщенная структурная схема микроконтроллера. Назначение. Характеристика. 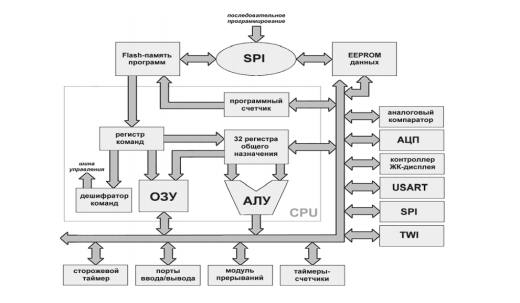 Основное назначение МК – контролировать все процессы, которые происходят на его платформе. От включения или выключения света по хлопку до поднятия штор при изменении освещенности на улице. По сути, МК осуществляет контроль за состоянием неких переменных и изменение системы в динамических условиях. Микроконтроллер (МК) характеризуется: 1) тактовой частотой, определяющей максимальное время выполнения переключения элементов в ЭВМ; 2) разрядностью, т.е. максимальным числом одновременно обрабатываемых двоичных разрядов. Разрядностъ МК обозначается m/n/k/ и включает: m -разрядность внутренних регистров, определяет принадлежность к тому или иному классу процессоров; n - разрядность шины данных, определяет скорость передачи информации; к - разрядность шины адреса, определяет размер адресного пространства. Например, МП i8088 характеризуется значениями m/n/k=16/8/20; 3) архитектурой. Понятие архитектуры МК включает в себя систему команд и способы адресации, возможность совмещения выполнения команд во времени, наличие дополнительных устройств в составе микропроцессора, принципы и режимы его работы. 22. Микроконтроллеры серии AVR. Состав серии AVR. Особенности серии AVR.  Семейство AVRвключает в себя микроконтроллеры самой разной конфигурации, с разным объемом памяти и разным количеством встроенных портов ввода-вывода и других дополнительных устройств. Семейство AVRвключает в себя микроконтроллеры самой разной конфигурации, с разным объемом памяти и разным количеством встроенных портов ввода-вывода и других дополнительных устройств.Конструктивное исполнение микроконтроллеров также очень разнообразно. Применяется несколько типов корпусов (см. рис. 3.1). Это традиционные корпуса типа PDIP с количеством ножек от 8 до 40. Корпуса типа SOIC с количеством выводов от 8 до 20. А вот большинство микроконтроллеров семейства Mega AVR выполнятся либо в сорокавыводных PDIP-корпусах, либо в современных многовыводных корпусах типа TQFP или MLF (до 64 выводов). Микроконтроллеры серии AVR относятся к классу восьмиразрядных микроконтроллеров.Это значит, что подавляющее большинство операций процессоры производят с восьмиразрядными двоичными числами. По этой причине встроенная шина данных у этих контроллеров тоже восьмиразрядная. Все ячейки памяти и большинство регистров микроконтроллера также восьмиразрядные. Для обработки шестнадцатиразрядных чисел некоторые внутренние регистры могут объединяться попарно. Каждая такая пара может работать как один шестнадцатиразрядный регистр. Исключение составляет память программ. Она целиком состоит из шестнадцатиразрядных ячеек. Микроконтроллеры AVR изготавливаются по КМОП-технологии, благодаря которой они имеют достаточно высокое быстродействие и низкий ток потребления. Большинство команд микроконтроллера выполняется за один такт. Поэтому быстродействие контроллеров может достигать 1 миллиона операций в секунду при тактовой частоте 1 МГц. 23. Микроконтроллеры серии AVR. Внутренняя память. Способы программирования Flash- и EEPROM-памяти. Внутренняя память Микроконтроллеры AVR имеют в своем составе три вида памяти. Во-первых,это ОЗУ (оперативная память для данных). В документации фирмы Atmel эта память называется SRAM.Объем ОЗУ для разных контроллеров варьируется от полного ее отсутствия (в микросхеме AT90S1200) до 2 Кбайт. Подробнее смотрите графу «SRAM» в табл. 3.1. Второй вид памяти— это память программ. Она выполнена по Flash-технологии и предназначена для хранения управляющей программы. В фирменной документации она так и называется — Flash-память. Объем программной памяти в разных микросхемах этой серии составляет от 1 до 64 Кбайт. Подробнее смотрите графу «Flash». Программная память допускает стирание записанной туда информации и повторную запись. Однако количество циклов записи/стирания ограничено. Программная память микроконтроллеров AVR допускает до 1000 циклов записи/стирания. Запись информации в память программ производится при помощи специальных устройств (программаторов). Последние модели микроконтроллеров AVR имеют режим автоперезаписи памяти программ. То есть управляющая программа самого микроконтроллера способна сама себя переписывать. Третий вид памяти— это энергонезависимая память для данных.Она также выполнена по Flash-технологии, но в технической документации она называется EEPROM. Основное назначение этого вида памяти — долговременное хранение данных. Данные, записанные в эту память, не теряются даже при выключенном источнике питания. Микроконтроллеры ATmega603/103 оснащены внутрисистемно программируемой Flash памятью, емкостью 64/128 Кбайт, и 2/4 Кбайтами EEPROM памяти данных. При поставке микроконтроллеров и встроенная Flash память программ и EEPROM память данных находятся в очищеном состоянии (т.е. содержимое в состоянии $FF) и они готовы к программированию. Приборы поддерживают режим высоковольтного (12 В) параллельного программирования и режим низковольного последовательного программирования. Напряжение программирования 12 В используется только если программирование разрешено, в ином случае ток по этому выводу не потребляется. Режим последовательного программирования является обычным способом загрузки программ и данных в микроконтроллеры, находящиеся непосредственно в системе пользователя. Матрица памяти программ микроконтроллеров ATmega603/103 организована из 256/512 страниц по 256 байт каждая. При программировании Flash памяти данные программы фиксируются в буфере страницы, что позволяет программировать сразу целую страницу данных программы в любом из режимов программирования. Матрица EEPROM памяти данных микроконтроллеров программируется по-байтово (байт - за - байтом) во всех режимах программирования. В последовательном режиме программирования встроенная функция самотактирования EEPROM выполняет автоматическую предварительную очистку каждого программируемого байта. 24. Микроконтроллеры серии AVR. Порты ввода-вывода. Периферийные устройства. ATMega8 Pxn – имя ножки порта микроконтроллера, где x буква порта (A, B, C или D), n номер разряда порта (7… 0). Cpin — паразитная емкость порта. VCC — напряжение питания. Rpu — отключаемый нагрузочный верхний резистор (pull-up). PORTxn — бит n регистра PORTx. PINxn — бит n регистра PINx. DDRxn — бит n регистра DDRx. Периферия микроконтроллеров AVR включает: порты (от 3 до 48 линий ввода и вывода), поддержку внешних прерываний, таймеры-счетчики, сторожевой таймер, аналоговые компараторы, 10-разрядный 8-канальный АЦП, интерфейсы UART, JTAG и SPI, устройство сброса по понижению питания, широтно-импульсные модуляторы. 2  5. Микроконтроллеры серии AVR. Регистры общего назначения (РОН). Регистры ввода-вывода. 5. Микроконтроллеры серии AVR. Регистры общего назначения (РОН). Регистры ввода-вывода.В микроконтроллерах серии AVR всего 32 регистра общего назначения. Для использования РОН в программе, каждый такой регистр имеет собственное уникальное имя: от R0 до R31. 26. Микроконтроллеры серии AVR. Память программ. Оперативная память микроконтроллеров AVR. Область памяти, совмещенная с набором регистров общего назначения (РОН). Область памяти, совмещенная с регистрами ввода-вывода (РВВ). Память программ- В мк используется три основных вида памяти. Память программ представляет собой постоянную память (ПЗУ), предназначенную для хранения программного кода (команд) и констант. Ее содержимое в ходе выполнения программы не изменяется. Память данных предназначена для хранения переменных в процессе выполнения программы и представляет собой ОЗУ. Оперативная память микроконтроллеров AVR - 2 вида памяти: Память программ: FLASH; Память данных: оперативная память (ОЗУ) SRAM (Static RAM) и энергонезависимая память данных EEPROM. Оперативная память микроконтроллеров AVR делится на три области. $0000 –$001F – область памяти, совмещенная с регистрами общего назначения (РОН). $0020 –$005F – область памяти, совмещенная с регистрами ввода- вывода (РВВ). $0060 –$FFFF – не совмещенная ни с чем область памяти. 27. Микроконтроллеры серии AVR. Область внутреннего ОЗУ. Область внешнего ОЗУ. Внутренним прерыванием называется прерывание, вызванное одним из встроенных периферийных устройств самого микроконтроллера. Например прерывание по таймеру, аналоговому компаратору, АЦП и т. д. Внешнее прерывание — это прерывание по сигналу, поступающему от внешнего источника на специальный вход микроконтроллера. 28. Микроконтроллеры серии AVR. Энергонезависимая память данных (EEPROM). Счетчик команд и стековая память. EEPROM — это специальная внутренняя память, выполненная по Flash-технологии и предназначенная для долговременного хранения данных. Для долговременного хранения различной информации, которая может изменяться в процессе функционирования микроконтроллерной системы, используется EEPROM-память. Все AVR имеют блок энергонезависимой электрически перезаписываемой памяти данных EEPROM от 64 Байт до 4 КБайт. Микроконтроллер ATmega8515 имеет объем EEPROM 512 байт. Этот тип памяти, доступный программе микроконтроллера непосредственно в ходе ее выполнения, удобен для хранения промежуточных данных, различных констант, коэффициентов, серийных номеров, ключей и т.п. EEPROM может быть загружена извне как через SPI интерфейс, так и с помощью обычного программатора. Доступ к EEPROM осуществляется с помощью определенных регистров спецфункций. Счетчик команд – это специализированный внутренний регистр микроконтроллера, в котором хранится адрес текущей выполняемой команды. Указатель стека – это специальный регистр, который предназначен для организации так называемой стековой памяти. Стековая память широко применяется в вычислительной технике. Вообще, стек – это некий буфер, состоящий из нескольких ячеек памяти, имеющий один вход, который одновременно является и выходом. 29. Микроконтроллеры серии AVR. Подсистема ввода-вывода. Система прерываний. Подсистема ввода-вывода - обмен данными между пользователями, приложениями и периферийными устройствами компьютера выполняет специальная подсистема ОС – подсистема ввода-вывода. Собственно, для выполнения этой задачи и были разработаны первые системные программы, послужившие прототипами операционных систем. Основными компонентами подсистемы ввода-вывода являются драйверы, управляющие внешними устройствами, и файловая система. Внешние устройства, выполняющие операции ввода-вывода, можно разделить на три группы: устройства, работающие с пользователем. Используются для связи пользователя с компьютером. Сюда относятся принтеры, дисплеи, клавиатура, манипуляторы (мышь, трекбол, джойстики) и т.п.; устройства, работающие с компьютером. Используются для связи с электронным оборудованием. К ним можно отнести дисковые устройства и устройства с магнитными лентами, датчики, контроллеры, преобразователи; коммуникации. Используются для связи с удаленными устройствами. К ним относятся модемы и адаптеры цифровых линий. Система прерываний - это совокупность программных и аппаратных средств, которые при наличии запросов обеспечивают прекращение выполнения текущей программы, работу по вызванной программе и возврат к прерванной. Система прерываний предназначена для обеспечения эффективной мультипрограммной работы и организации взаимодействия в многопроцессорных вычислительных системах. 30. Микроконтроллеры серии AVR. Режимы работы таймеров. Встроенные периферийные устройства. Режимы работы таймеров Таймеры микроконтроллеров семейства AVR могут работать в нескольких режимах. Режим Normal Это самый простой режим. В этом режиме таймер производит подсчет приходящих на его вход импульсов (от тактового генератора или внешнего устройства) и вызывает прерывание по переполнению. Этот режим является единственным режимом работы для восьмиразрядных таймеров большинства микроконтроллеров семейства «Tiny» и для части микроконтроллеров семейства «Mega». Для всех остальных восьмиразрядных и всех шестнадцатиразрядных таймеров это всего лишь один из возможных режимов. Режим «Захват» (Capture) Суть этого режима заключается в сохранении содержимого счетного регистра таймера в определенный момент времени. Запоминание происходит либо по сигналу, поступающему через специальный вход микроконтроллера, либо от сигнала с выхода встроенного компаратора. Этот режим удобен в том случае, когда нужно измерить длительность какого-либо внешнего процесса. Режим «Сброс при совпадении» (СТС) Для работы в режиме СТС используется специальный регистр —регистрсовпадения. Если микроконтроллер содержит несколько таймеров, то для каждого из них существует свой отдельный регистр совпадения. Причем для восьмиразрядных таймеров регистр совпадения — это один восьмиразрядный регистр. Для шестнадцатиразрядных таймеров регистр совпадения — это два восьмиразрядных регистра. Встроенные периферийные устройства. В составе МК, кроме центрального процессора, выполняющего основные алгоритмы обработки данных, присутствуют так называемые периферийные устройства, также выполняющие функции обработки данных, но только по специализированным алгоритмам, освобождая основной процессор от многочисленных вспомогательных процедур. К ним можно отнести следующие устройства: модуль скоростного ввода/ вывода данных (встроенный процессор событий); встроенные многоканальные ШИМ-генераторы; встроенный аналого-цифровой преобразователь; последовательные порты обмена данными; встроенный контроллер прерываний; сервер периферийных транзакций. |