организация ВД вариант 4. Основные задачи самолетовождения и факторы, определяющие необходимость автоматизации данного процесса
 Скачать 129.7 Kb. Скачать 129.7 Kb.
|

|
Основные задачи самолетовождения и факторы, определяющие необходимость автоматизации данного процесса Самолетовождение — это наука о точном, надежном и безопасном вождении воздушных судов из одной точки земной поверхности в другую. Под самолетовождением понимается также комплекс действий экипажа самолета и работников службы движения, направленных на обеспечение безопасности, наибольшей точности выполнения полетов по установленным трассам (маршрутам) и прибытия в пункт назначения в заданное время. Основными задачами экипажа самолета гражданской авиации при осуществлении самолетовождения являются: Точное выполнение полета по установленной трассе (маршруту). Определение навигационных элементов, необходимых для выполнения полета по установленному маршруту или поставленной специальной задачи (фотографирование, сбрасывание груза и др.). Обеспечение прибытия самолета к пункту назначения и выполнение посадки на аэродроме в заданное время. Обеспечение безопасности полета. Для решения указанных задач экипаж использует современные технические средства самолетовождения, которые подразделяются по месту расположения, по характеру использования и по принципу действия. По месту расположения технические средства делятся на самолетные (бортовые) и наземные, а по характеру использования — на автономные и неавтономные. Автономными называются такие средства, применение которых не требует специального наземного оборудования. Неавтономными называются средства, которые выдают информацию на основе их взаимодействия с наземными устройствами. По принципу действия технические средства самолетовождения делятся на четыре группы: Геотехнические средства самолетовождения, основанные на измерении различных параметров естественных (геофизических) полей Земли. К этой группе относятся магнитные компасы, барометрические высотомеры, указатели воздушной скорости, термометры наружного воздуха, часы, гирополукомпасы, дистанционные гиромагнитные и гироиндукционные компасы, курсовые системы, авиагоризонты, указатели поворота, оптические визиры, навигационные индикаторы, инерциальные системы и др. Большинство из этих средств устанавливается на всех самолетах и используется в любом полете, они применяются также при пользовании другими техническими средствами самолетовождения. Радиотехнические средства самолетовождения, основанные на измерении параметров электромагнитных полей, излучаемых специальными устройствами, находящимися на борту самолета или на земле. К ним относятся: самолетные радиокомпасы и связные радиостанции, радиовысотомеры, самолетные радиолокационные станции, доплеровские измерители угла сноса и путевой скорости, наземные радиопеленгаторы, приводные и радиовещательные станции, радиомаяки, радиомаркеры и наземные радиолокаторы. Самолетное радионавигационное оборудование и наземные радиотехнические устройства образуют системы самолетовождения. По дальности действия последние делятся на системы дальней навигации (свыше 1000 км), ближней навигации до 1000 и системы посадки самолетов. Радиотехнические средства широко применяются при выполнении полетов на больших высотах, над морем, безориентирной местностью, в сложных метеорологических условиях и ночью, а также при заходе на посадку. Астрономические средства самолетовождения, основанные на использовании небесных светил. К этой группе средств относятся астрономические компасы, авиационные секстанты и астрономические ориентаторы. Преимуществом астрономических средств является их автономность, помехозащищенность и независимость точности их работы ни от дальности, ни от продолжительности полета. Они могут применяться в любое время суток и в любом месте Земного шара для выдерживания направления полета и определения местонахождения самолета. Светотехнические средства самолетовождения, основанные на использовании бортовых или наземных источников света. К этой группе средств относятся светомаяки, прожекторы, огни посадочных систем, пиротехнические (дымовые шашки, пирофакелы и др.), ориентирные бомбы и знаки. Они облегчают ведение ориентировки и посадку самолетов в сложных метеорологических условиях и ночью. Кроме рассмотренных технических средств, для самолетовождения экипаж использует полетные и бортовые карты, штурманские счетно-измерительные инструменты, различные графики и таблицы. Современные самолеты оснащены такими техническими средствами самолетовождения, которые обеспечивают выполнение полетов в различное время суток, над любой местностью и в любых метеорологических условиях. Принципы решения задачи автоматизации самолетовождения. Возросшие скорости полетов ВС гражданской авиации и обилие аэронавигационной информации привели к дефициту времени, которым располагает экипаж для оценки быстро меняющейся в полете аэронавигационной обстановки, принятия решения и его выполнения. Дефицит времени приводит к вынужденной поспешности решения ряда задач, связанных с пилотированием и навигацией. При этом возрастает вероятность промахов в работе с аппаратурой и ошибок в расчетах, цена которых очень высока, так как оказывает влияние на безопасность полетов. Кардинального решения этой проблемы можно достичь только за счет автоматизации процесса вождения ВС по заданному маршруту и совершенствования подготовки экипажа к полету. Все современные магистральные самолеты и часть вертолетов оборудованы автоматизированными навигационными системами (АНС). Применение АНС в полете освобождает экипаж от выполнения рутинных операций, связанных с расчетами, графической работой на полетной карте и обслуживанием датчиков навигационной информации. Анализ процесса вождения ВС по маршруту показал, что необходимо и достаточно иметь на борту непрерывную информацию об уклонениях ВС от заданной траектории полета и их производных. При этом число учитываемых производных зависит от совершенства навигационного оборудования. Программирование заданного маршрута. Центральная задача ВН в полете – точное выдерживание ВС линии заданного пути, поэтому в основе автоматизированного самолетовождения лежит непрерывное соблюдение условия, при котором управляющие сигналы, вырабатываемые АНС на каждом участке маршрута, стремятся к нулю. Для обеспечения этого условия пространственно-временная программа полета должна содержать данные, по которым можно зафиксировать линию заданного пути относительно модели земной поверхности. В зависимости от степени совершенства АНС применяются разные способы программирования ЛЗП. Наиболее совершенные АНС в качестве информационной системы координат используют геодезическую (географическую) систему. Для этого в запоминающее устройство АНС вводятся широты и долготы всех ППМ и радиомаяков, если в полете предусмотрено их применение. Дальнейшее преобразование координат позволяет произвести расчет на сфере и получить S и начальный истинный путевой угол  каждого участка маршрута каждого участка маршрута , , Где  – сферические координаты начального ППМ; – сферические координаты начального ППМ;  – сферические координаты конечного ППМ участка. – сферические координаты конечного ППМ участка.На каждом участке маршрута для удобства счисления вводится самостоятельная система координат, в которой ось OS совмещается с ЛЗП, а ось OZ перпендикулярна ей. Начало координат чаще совмещается с начальным ППМ, иногда с конечным. В последнем случае на индикаторах в полете отсчитывается оставшееся до конечного ППМ расстояние. Подобная система координат носит название частной ортодромической. В некоторых случаях используется главная ортодромическая система координат, отличающаяся от частной тем, что распространяется на весь или часть маршрута. Ось OS у нее совмещается с ИПМ и КПМ, где из-за частых разворотов применение частноортодромической системы координат нецелесообразно. Основной недостаток применения главной ортодромической системы координат заключается в невозможности выполнять автоматизированное вождение ВС, так как нельзя добиться Z = 0. Менее совершенные АНС (без электронной памяти) не имеют системы программирования всего маршрута. Поэтому рассчитанные или измеренные на карте путевые углы и расстояния вводятся в АНС на каждом этапе маршрута. Непрерывность автоматизированного самолетовождения достигается одновременным счислением пути по двум частным ортодромиям с отображением на двух индикаторах при переходе с одного участка на другой. Вследствие того, что частноортодромическая система координат практически не отличается от прямоугольной, задача счисления пути решается на плоскости, т.е. без учета сферичности Земли. Для этого в алгоритме вычислительного устройства применяются формулы не сферической, а прямолинейной тригонометрии. Допустимость решения задачи на плоскости определяется требованиями, предъявляемыми к точности воздушной навигации и характеристиками навигационных средств. Задачи автоматизации самолетовождения. Непрерывное получение позиционной информации в виде текущих координат ВС от внешних источников, например, радио или спутниковых систем навигации позволяет осуществить автоматизированное вождение ВС по заданным маршрутам без привлечения дополнительной информации. Для выработки управляющего сигнала производится преобразование географических координат МС, полученных от внешнего источника в частноортодромические Z и S   Характер выработки управляющего сигнала в результате счисления пути ВС зависит от состава исходных данных. В соответствии с этим в навигации находят применение курсодоплеровское, курсоводушное, инерциальное счисление пути. Все они отличаются алгоритмами, объединяющими исходные и измеренные данные, необходимые для расчета составляющих скорости движения ВС вдоль продольной  и боковой и боковой  осей координат, связанных с моделью земной поверхности в АНС. осей координат, связанных с моделью земной поверхности в АНС.Требования безопасности самолетовождения. Обеспечение безопасности полета является одной из главных задач самолетовождения. Она решается как экипажем, так и службой движения, которые обязаны добиваться безопасности полета каждого самолета даже в тех случаях, когда принятые для этого меры повлекут за собой нарушение регулярности или снижение экономических показателей полета. Безопасность самолетовождения означает предотвращение случаев: столкновений самолетов с наземными препятствиями и с другими самолетами в полете; потери ориентировки; попаданий самолетов в зоны с особым режимом полета; попаданий самолетов в районы с опасными для полетов метеоявлениями. Безопасная высота полета и ее расчет Одним из важнейших требований безопасности самолетовождения является предотвращение столкновений самолетов с земной поверхностью или препятствиями. Основным способом решения этой задачи в настоящее время является расчет, и выдерживание в полете безопасной высоты по барометрическому высотомеру. Безопасной высотой называется минимально допустимая истинная высота полета, гарантирующая самолет от столкновений с земной (водной) поверхностью или препятствиями. Минимально допустимые истинные безопасные высоты установлены НПП ГА для полетов в зоне взлета и посадки, по воздушным трассам и маршрутам вне трасс, а также в районе подхода. Минимальные безопасные высоты определены как для визуальных полетов, так и для полетов по приборам в зависимости от рельефа местности, скорости полета, допустимых отклонений в пилотировании, а также возможных вертикальных отклонений от заданной высоты полета в турбулентной атмосфере. Для полетов по приборам и для визуальных полетов установлены определенные правила расчета и выдерживания безопасных высот полета. Расчет безопасной высоты полета по давлению 760 мм. рт. ст. Безопасная высота по давлению 760 мм рт. ст. рассчитывается при полете на эшелоне, когда шкалы давлений барометрических высотомеров установлены на отсчет, равный 760 мм рт. ст. Такой расчет производится по минимальной истинной безопасной высоте, абсолютной высоте наивысшей точки рельефа с учетом искусственных препятствий на данном участке трассы, минимальному атмосферному давлению и температуре воздуха (рис.1). При расчете безопасной высоты учитываются как постоянные элементы, так и переменные (атмосферное давление и температура воздуха). Поэтому он должен выполняться перед каждым полетом и обеспечивать пролет самолета на установленной минимальной истинной безопасной высоте относительно самого высокого препятствия- на данном участке трассы над точкой с минимальным давлением. Безопасная барометрическая высота по давлению 760 мм рт. ст. рассчитывается по формуле Н760 без = Н без.ист + Нp — Δ Нt+ (760 — Н прив.мин ) · 11, где Н без. ист — установленное значение минимальной истинной безопасной высоты для полетов по правилам полетов по приборам (по ППП); Н р — абсолютная высота наивысшей точки рельефа местности с учетом высоты искусственных препятствий на данном участке трассы в пределах установленной ширины полосы. При полетах по воздушным трассам и маршрутам вне трасс по ППП рельеф и препятствия учитываются в полосе по 25 км в обе стороны от оси трассы (маршрута); Рприв.мин—минимальное атмосферное давление по маршруту (участку) полета, приведенное к уровню моря; ΔHt— методическая температурная поправка высотомера, которая учитывается по навигационной линейке; 11 — барометрическая ступень в метрах у земли, соответствующая изменению давления на 1 мм рт. ст. 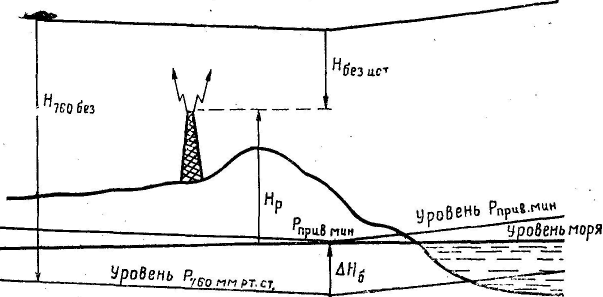 Рис.1. Расчет безопасной высоты полета по давлению 760 мм рт. ст. Для полетов по трассам и маршрутам вне трасс по правилам полетов по приборам установлены следующие минимальные истинные безопасные высоты (вне зависимости от скорости самолета): Над равниной, холмистой местностями и водными пространствами Hбез. ист = 400 м. Над горной местностью с высотой гор до 2000 м Hбез. ист = 600 м. Над горной местностью с высотой гор более 2000 м Hбез. ист =1000 м Характер местности принято определять по относительному превышению рельефа, которое представляет собой разность между наибольшей и наименьшей высотами рельефа, расположенными в радиусе 25 км. Равнинной называется местность с относительными превышениями рельефа не более 100 м, холмистой — не более 500 м и горной — более 500 м. К горной относится также местность с различными относительными превышениями рельефа, расположенная на высотах 2000 м над уровнем моря и более. Определение высоты нижнего безопасного эшелона. Для предотвращения столкновений самолетов в воздухе введено эшелонирование полетов по высоте. Высоты эшелонов установлены в зависимости от направления полета. Для воздушных трасс РФ принята полукруговая система вертикального эшелонирования полетов. Для направления полета с ИПУ в пределах от 0 до 179° включительно применяются следующие эшелоны полетов: 900, 1500, 2100, 2700, 3300, 3900,4500, 5100, 5700, 6600, 7800, 9000, 11 000 м, а для направления полета с ИПУ в пределах от 180 до 359° включительно — 600, 1200, 1800, 2400, 3000, 3600, 4200, 4800, 5400, 6000, 7200, 8400, 10000, 12 000 м. Высоты (эшелоны) полета при радиообмене передаются в абсолютных величинах. Попутные эшелоны на высотах от 600 до 6000 м установлены через 600 м, а встречные — через 300 м, от 6000 до 9000 м соответственно через 1200 и 600 м, а на высотах выше 9000 м попутные эшелоны установлены через 2000 м, а встречные через 1000 м. На отдельных участках воздушных трасс, направление которых выходит за пределы полукруга, эшелонирование самолетов может осуществляться с учетом общего направления данной трассы. На каждом участке трассы в зависимости от рельефа местности, атмосферного давления и температуры воздуха используются не все установленные эшелоны полета. С целью обеспечения безопасности полетов используются лишь те эшелоны, которые расположены не ниже безопасной высоты полета. Нижним безопасным эшелоном называется эшелон, равный безопасной высоте или ближайший больший эшелон, взятый для данного направления полета. Таким образом, выбору нижнего безопасного эшелона должен предшествовать расчет безопасной высоты полета. Высотой перехода называется высота, установленная в районе аэродрома, на которой и ниже которой полет воздушного судна контролируется по атмосферному давлению на аэродроме. При снижении для захода на посадку барометрические шкалы высотомеров переводятся с давления 760 мм рт. ст.на давление, соответствующее уровню ВПП, на эшелоне перехода. Эшелоном перехода называется нижний эшелон, при пересечении которого барометрические высотомеры устанавливаются на атмосферное давление уровня ВПП аэродрома посадки. Эшелон перехода на 300 ми более выше высоты перехода (высоты полета по кругу). Расчет безопасной высоты для визуального полета ниже нижнего эшелона. При визуальном полете ниже нижнего эшелона шкалы давлений барометрических высотомеров устанавливаются на минимальное атмосферное давление на данном участке маршрута, приведенное к уровню моря. Такая установка шкал давлений высотомеров осуществляется при выходе самолета из зоны взлета и посадки (из зоны круга). Обратная перестановка шкал давлений с минимального давления на давление аэродрома посадки выполняется при входе самолета в зону взлета и посадки (в зону круга). Безопасная барометрическая высота для полетов ниже нижнего эшелона рассчитывается по минимальной истинной безопасной высоте, абсолютной высоте наивысшей точки рельефа с учетом искусственных препятствий и температуры воздуха (рис.2) по формуле H прив.без = H без.ист + H р — ΔH t, где H без.ист — установленное значение минимальной безопасной истинной высоты для визуальных полетов ниже нижнего эшелона (по ПВП); H р — абсолютная высота наивысшей точки рельефа местности с учетом искусственных препятствий в пределах ширины трассы (маршрута); ΔH t — методическая температурная поправка высотомера. Правила визуальных полетов (ПВП) по маршруту и в районе аэродрома применяются для самолетов с истинной скоростью не более 550 км/ч. 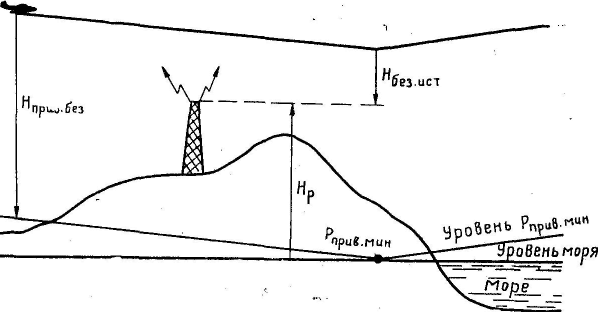 Рис.2. Расчет безопасной высоты по приведенному минимальному давлению Для визуальных полетов по маршруту ниже нижнего эшелона установлены следующие минимальные истинные безопасные высоты: Над равнинной, холмистой местностями и водными пространствами— 100 мдля скорости полета до 300 км/чи 200 мдля скорости 301—550 км/ч. Над горной местностью с высотой гор до 2000 м — 300 м. Над горной местностью с высотой пор более 2000 м— 600 м. Для визуальных полетов над горной местностью Hбез.ист берется вне зависимости от скорости полета самолета. При расчете безопасной высоты для полетов по ПВП ниже нижнего эшелона по маршруту и в районе аэродрома в равнинной и холмистой местностях высота искусственных препятствий не учитывается, если фактическая и прогнозируемая видимости (по среднему значению градации) составляют 3 кми более, а скорость полета самолета не более 300 км/ч. Командир экипажа обязан при полете в районе искусственных препятствий обходить их визуально на удалении не менее 500 м. Определение атмосферного давления, приведенного к уровню моря. Обычно минимальное атмосферное давление на участках трассы, приведенное к уровню моря, определяется по синоптической карте, на которой оно дано относительно уровня моря. Но если на аэродроме, расположенном в равнинной и холмистой местностях, нет метеостанции, то приведенное давление определяет экипаж (пилот) по барометрическому высотомеру. Для этого необходимо стрелки высотомера установить на отсчет, равный абсолютной высоте аэродрома, а затем по шкале давления отсчитать приведенное давление на уровне моря. Приведенное давление можно также рассчитать. В этом случае по высотомеру определяют давление на аэродроме, а затем рассчитывают приведенное давление по упрощенной формуле Р прив = Раэр±(Hаэр/11) где Раэр — атмосферное давление на аэродроме; Hаэр — абсолютная высота аэродрома. В формуле знак плюс соответствует положению аэродрома выше, а знак минус ниже уровня моря. Для приведения давления аэродрома к уровню моря с большей точностью пользуются следующей формулой:  где α — коэффициент объемного расширения воздуха, равный 1/273;to— температура воздуха на аэродроме. Приведение давления к уровню моря на метеостанциях осуществляется по заранее рассчитанным таблицам. Расчет безопасной высоты для района подхода. После входа самолета в район аэродрома посадки (за 5—10 мин до начала снижения) штурман обязан рассчитать рубеж начала снижения и безопасную высоту для района подхода. Безопасная высота для района подхода рассчитывается в зависимости от условий полета по давлению 760 мм рт. ст. или по приведенному минимальному давлению. Для района подхода установлены следующие минимальные истинные безопасные высоты: Для полетов по ППП — Нбез.ист=400 м. Для полетов по ПВП для самолетов со скоростями полета 300 км/ч и менее — Нбез.ист=100 м. Для полетов по ПВП для самолетов со скоростями полета от 301 до 550 км/ч—Нбез.ист=200 м Рельеф местности и искусственные препятствия в районе подхода учитываются в полосе по 10 км в обе стороны от оси маршрута при полетах по ППП и по 5 км при полетах по ПВП. Расчет безопасной высоты для полета по схеме захода на посадку. Безопасная высота для полета по схеме захода рассчитывается подавлению на аэродроме посадки (рис.3). Расчет производится по формуле Наэр.без = Hбез. ист + ΔHp — ΔНt, или Наэр.без = МБВ — ΔНt. МБВ — это минимальная безопасная высота полета по схеме захода на посадку. Указывается на схеме захода для полетов по ППП. МБВ = Hбез. ист + ΔHp, где ΔHp = Hр — Hаэр. На схеме захода на посадку превышения рельефа и препятствий даны относительно уровня аэродрома. Для полетов в зоне взлета и посадки установлены следующие минимальные истинные безопасные высоты: Для полетов по ППП для всех типов самолетов — Hбез. ист =300 м. Для полетов по ПВП для самолетов со скоростью полета по кругу 300 км/ч и менее — Hбез. ист = 100 м. Для полетов по ПВП для самолетов со скоростью полета по кругу более 300 км/ч — Hбез. ист =200 м. 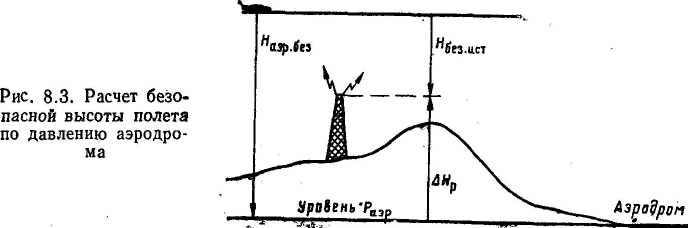 Рис.3 Расчет безопасной высоты полета по давлению аэродрома. Превышения рельефа местности и искусственных препятствий учитываются в полосе по 10 км в обе стороны от оси маршрута захода на посадку при полетах по ППП и по 5 км при полетах по ПВП. Рассчитанная безопасная высота должна соблюдаться до выхода из четвертого разворота. Предотвращение случаев потери ориентировки Для достижения безопасности самолетовождения экипаж обязан в течение всего полета сохранять ориентировку, т. е. знать местонахождение самолета. Современные средства самолетовождения обеспечивают сохранение ориентировки при полетах, как днем, так и ночью. Однако практика показывает, что еще встречаются случаи потери ориентировки. Это вызывает необходимость изучения ее причин и действий экипажа при этом. Ориентировка считается потерянной, когда экипаж не знает своего местонахождения и не может определить направление полета к пункту назначения. Ориентировка может быть потеряна полностью и временно. Ориентировка считается полностью потерянной, если экипаж по этой причине произвел вынужденную посадку вне аэродрома назначения. Ориентировка считается временно потерянной, если самолет после потери ориентировки был выведен экипажем самостоятельно или при помощи наземных навигационных средств на заданный маршрут с последующей посадкой на аэродроме назначения. При видимости земной поверхности факт потери ориентировки устанавливается невозможностью опознавания пролетаемой местности при сличении ее с картой и отсутствием ориентиров, ожидаемых по расчету времени. При полете вне видимости земной поверхности факт потери ориентировки устанавливается по невозможности даже приближенно указать направление дальнейшего полета. Каждый случай потери ориентировки тщательно расследуется, анализируется и разбирается с командным и летным составом. По результатам расследования принимаются меры к предотвращению подобных случаев в дальнейшем. Виновные в потере ориентировки по причинам халатности, недисциплинированности, нарушения правил и порядка самолетовождения привлекаются к ответственности. Предотвращение случаев попаданий самолетов в районы с опасными для полетов метеоявленияминеобходимо: перед полетом тщательно изучить метеообстановку по трассе и прилегающим к ней районам; наметить порядок обхода опасных условий погоды; наблюдать в полете за изменением погоды, особенно за развитием явлений, опасных для полетов; периодически получать по радио сведения о состоянии погоды на трассе, в пункте назначения и на запасных аэродромах; при встрече с опасными для полета метеоявлениями немедленно докладывать об этом службе движения и, если нет возможности обойти их, необходимо вывести самолет из опасного для полета района и возвратиться на аэродром вылета или произвести посадку на ближайшем запасном аэродроме; все изменения навигационного режима полета, связанные с опасными условиями погоды, подробно записывать в штурманский бортовой журнал, отмечая в нем время, курс, высоту и скорость полета. Литература: М.А. Черный, В.И. Кораблин Самолетовождение. – Москва: «Транспорт», 1973. С. 3-4, С. 96-109. Н.А. Кузьмин Воздушная навигация и аэронавигационное обеспечение полетов. – Ульяновск: УВАУ ГА, 2004. С. 86-89. |