Лаба 2. Отчет по практической работе 2 Анализ работы метода преследования цели в условиях изменения скорости и угла упреждения
 Скачать 291.67 Kb. Скачать 291.67 Kb.
|

|
Федеральное государственное автономное Образовательное учреждение Высшего образования СИБИРСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ Институт космических и информационных технологий Кафедра систем искусственного интеллекта ОТЧЕТ ПО ПРАКТИЧЕСКОЙ РАБОТЕ №2 «Анализ работы метода преследования цели в условиях изменения скорости и угла упреждения» Преподаватель ________ Перфильев Д.А. Студент КИ20-11Б ________ Питерский Д. В. Студент КИ20-11Б ________ Шуткин С. С. Студент КИ20-11Б ________ Брагин И. А Студент КИ20-11Б ________ Ряжкин В. Р. Красноярск 2022 Вопросы 1 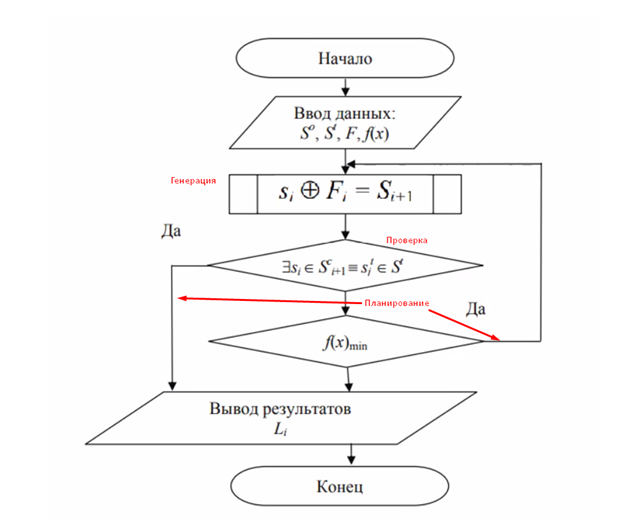 мы пытаемся найти путь до цели, те красавицы и чудовища мы пытаемся найти путь до цели, те красавицы и чудовищаЦель работы: провести анализ работы метода преследования цели в условиях изменения скорости и угла упреждения Задача работы: выполнить эксперимент «Преследования цели» классическим методом с изменяемой скоростью и углом упреждения, ограничивая количество испытаний, и провести анализ успешных попыток преследования, выделить оптимальное соотношение скорости и угла упреждения. Ход работы: 1) Поиск цели. Принцесса идет до своей цели. Чудовище идет до принцессы. Поиск выполняется. 2) Выявление оптимального пути. Функция определяет оптимальное состояние в раскрытом фронте. Мы пытаемся вести и принцессу и чудовище по оптимальному пути 3) Преследование цели Методы реализуются в следующих условиях: 1) Задано одно начальное и целевое состояние 2) Оценочная функция f(x) определена для всех состояний пространства поиска 3) Относительно оценочной функции пространство поиска должно быть монотонно(это основное условие) 4) Состояния в пространстве поиска связаные Вопросы 2 1 Какая из задач (или задачи) поиска, решается во второй практической работе? №1) решаются первая задача и третья. Первая это поиск состояния а третья это выделение оптимального пути как цепочки Li до заданного состояния нескольких заданных секций состояний с таргет илиграфия из одного или нескольких с object 2 Какая часть оценочной функции алгоритма А* является монотонной? №2) (G(x)) относительно оценочной функции пространства поиска должна быть монотонной. 3 К каким последствием может привести потеря монотонности оценочных функций составляющих алгоритма А*? №3) (F(x)) теряет свою монотонность и алгоритм А^* перестает быть оптимальным увеличивается фронт увеличивается сектор обзора 4 Какой способ управления генерацией применяется или не применяется в данной практической работе? №4) 1)по направлению генерации оценочная функция 2) по кол-ву итерации (граничной глубине). Границу мы не чертим. 3) Изменение способа генерации. Везде один 5 В каком алгоритме преследования курс Чудовища совпадает с линией визирования? №5) алгоритм классической погони считается наиболее ранней разработки и на сегодня наиболее распространенной в силу очевидной простоты реализации для реализации классического алгоритма должны быть выполнены условия: 1) скорость цели - const 2) вид движения цели - прямолинейный 3)скорость поисковой системы - const 4)отношения скоростей - Vs^t Vs^s 5)курсовой угол ПС = 0 т.е курс ПС совпадает по направлению с линией визирования поэтому в данном алгоритме преследования угол визирования = курс ПС ПС = поисковая система. Вопросы 3 Опишите особенность классических алгоритмов преследования. (перечислить указав особенность работы). Классический алгоритм погони – приближается и догоняет цель сзади; Погоня с упреждением, позволяет достичь цели быстрее, приближаясь к ней с боку; Алгоритм параллельного сближения, - имеет преимущество, когда цель маневрирует; Алгоритм пропорционального сближения. Достаточно контролировать изменение угловой скорости. Укажите на схеме «погони»: линию визирования, угол визирования курсовой вектор и угол Принцессы и Чудовища. 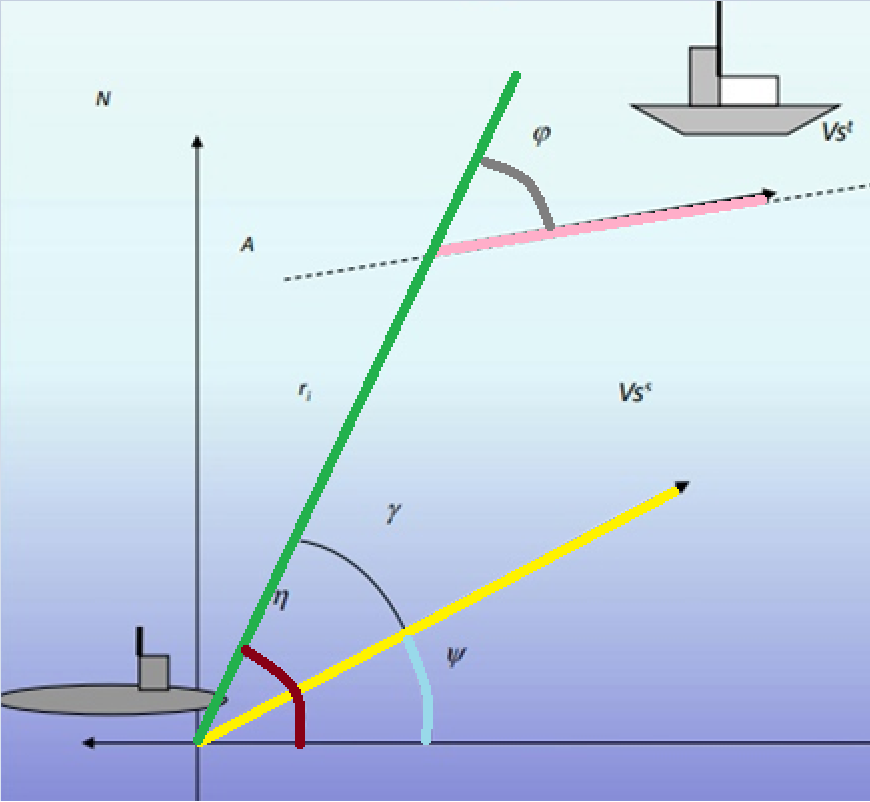 Зеленый – линия визирования, коричневый – угол визирования, голубой – угол чудовища, серый – угол принцессы, розовый – вектор принцессы, желтый – вектор чудовища. Определите оптимальное соотношение скорости и угла упреждения, используя данные практических испытаний, проведенных в работе. Самое оптимальное соотношение скорости и угла упреждения является скорость и угол равные двум. Покажите, как рассчитывается угол упреждения в алгоритме параллельного сближения. 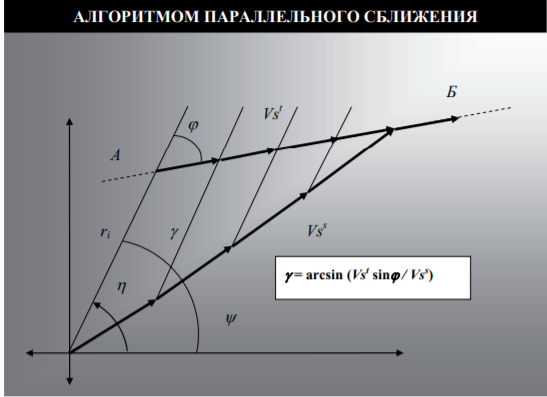 Вопросы 4 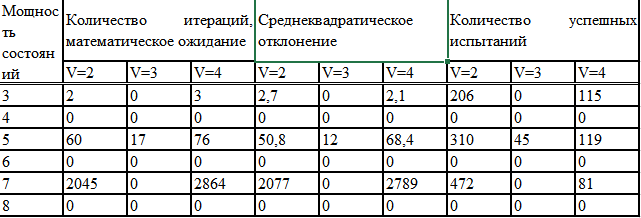 Рисунок 1 – Таблица 1000 итераций, угол 1 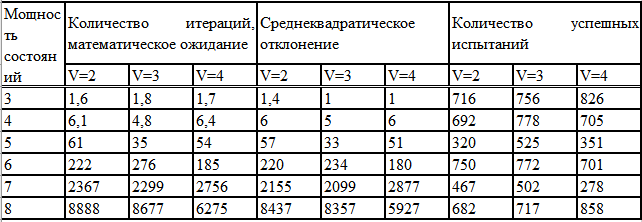 Рисунок 2 – Таблица 1000 итераций, угол 2 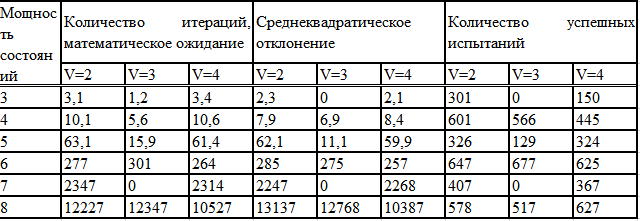 Рисунок 3 – Таблица 1000 итераций, угол 3  – формула математического ожидания – формула математического ожидания – Сумма всех итераций для успешных испытаний, – Сумма всех итераций для успешных испытаний,N – Количество успешных испытаний (поисковая система догоняет цель), Пример для мощности состояния 8, угол 3, скорость 4  Вопросы 5 Соотношение угла упреждения и скорости оптимально тогда, когда среднеквадратичное отклонение минимально. Например, для соотношения угла 2 и скорости 4 соответствует значение среднеквадратичного отклонения – 5927. Оно же является минимальным из всех, значит это соотношение оптимально. |