ЛР4 (САУД)) (испр1). Петербургский государственный университет путей сообщения Императора Александра I
 Скачать 0.9 Mb. Скачать 0.9 Mb.
|

|
Федеральное агентство железнодорожного транспорта Федеральное государственное бюджетное образовательное учреждение высшего образования «Петербургский государственный университет путей сообщения Императора Александра I» (ФГБОУ ВО ПГУПС) Кафедра «Электрическая тяга» Отчёт По лабораторной работе №4 по дисциплине «Системы автоматизированного управления движением высокоскоростного транспорта» «Исследование алгоритмов управления электропоездом с двумя подключениями тяги при отклонении от графика движения» Выполнили студенты: Суворов Н.С. Курс 4 Максимцев Д.Г. Группа ПС-605 Принял: Якушев А.Я. Санкт-Петербург 2020 Цель работы - Исследование алгоритмов управления электропоездом с двумя подключениями тяги при отклонении от графика движения Схема компьютерной модели изображена на рисунке 1 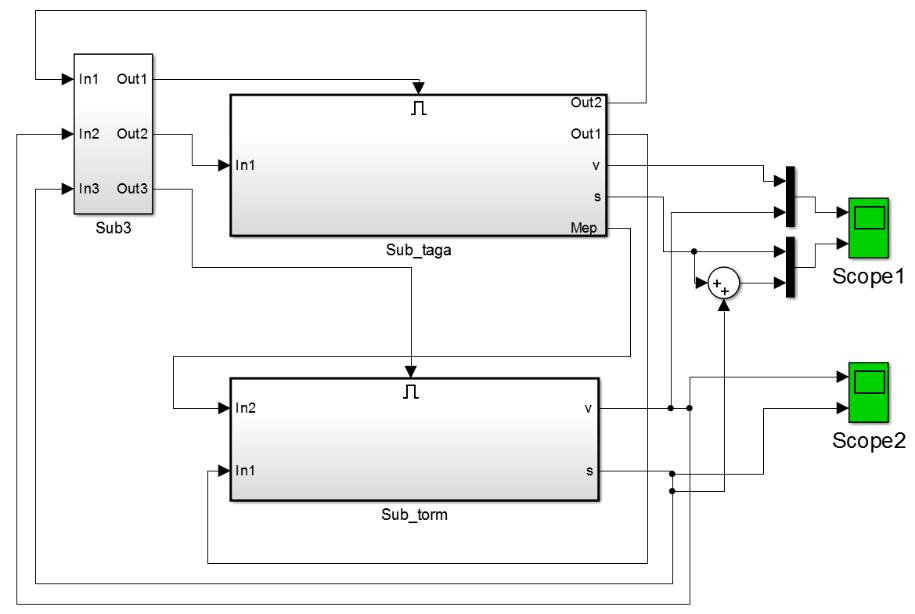 Рисунок 1 – Схема компьютерной модели Рисунок блока «Sub_torm» изображена на рисунке 2 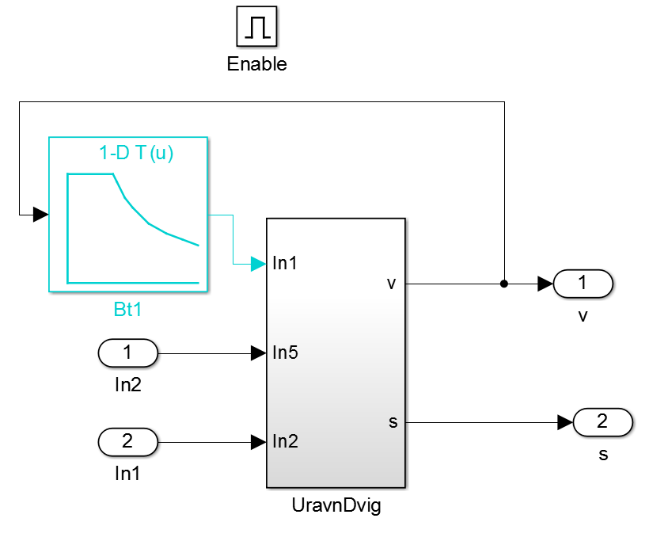 Рисунок 2 - Блок «Sub_torm» Рисунок блока «Sub_taga» изображена на рисунке 3 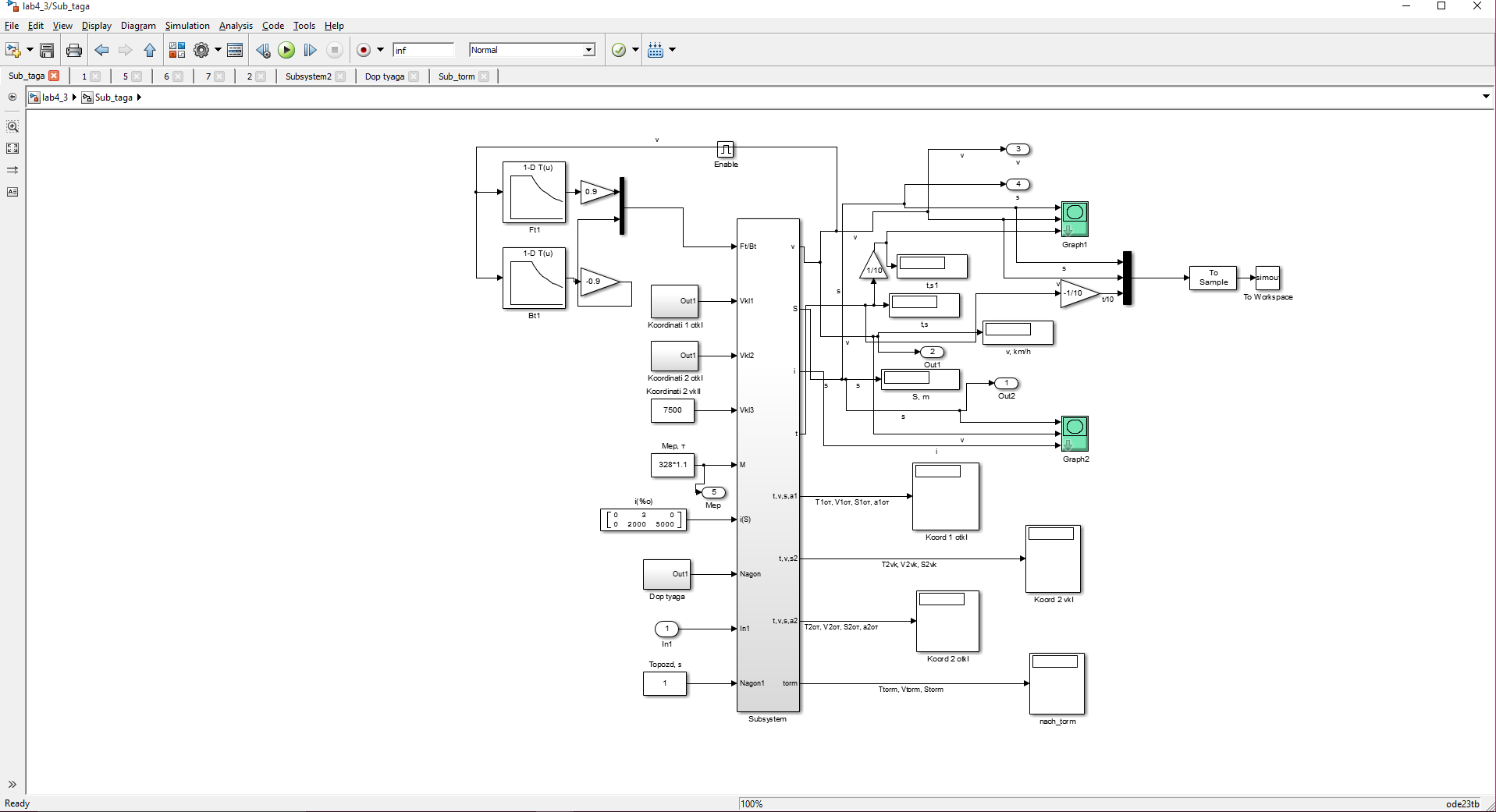 Рисунок 3 - Блок «Sub_taga» Расчёт массы электропоезда Mэп=nгв ⋅Мгв +nмв ⋅Ммв + nпв ⋅Мпв + Nваг ⋅Мпс = 2 ⋅38 +2 ⋅48 + 2 ⋅36 + 6 ⋅8 =292 (т) Тяговая характеристика   Тормозная характеристика   В таблице 1 представлена тяговая характеристика Таблица 1- Тяговая характеристика
В таблице 2 представлена тормозная характеристика Таблица 2- Тормозная характеристика
В таблице 3 представлены номинальные параметры Таблица 3 – Номинальные данные
 Время дополнительного движения по времени  Величина корректировки по пути  Величина корректировки по скорости  В таблице 4 представлены расчётные значения при отклонении в тяге, по пути, и скорости Таблица 4 - Расчётные значения при отклонении в тяге, по пути, и скорости
Графики траекторий режимов движения при номинальных параметрах электропоезда и измененных характеристик изображены на рисунке 4 и 5. 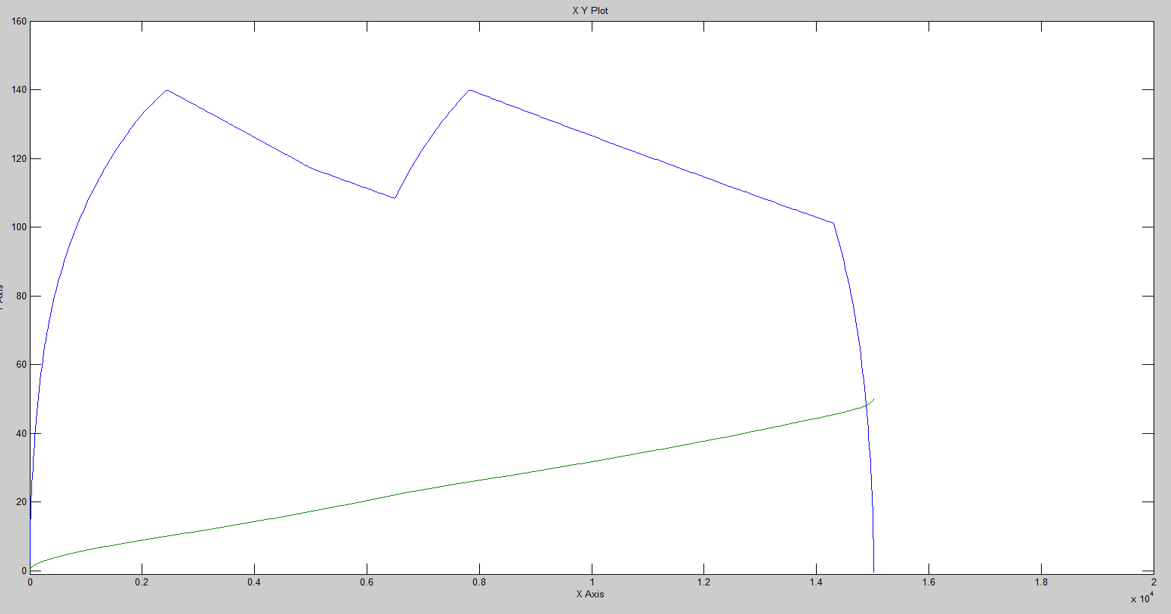 Рисунок 4 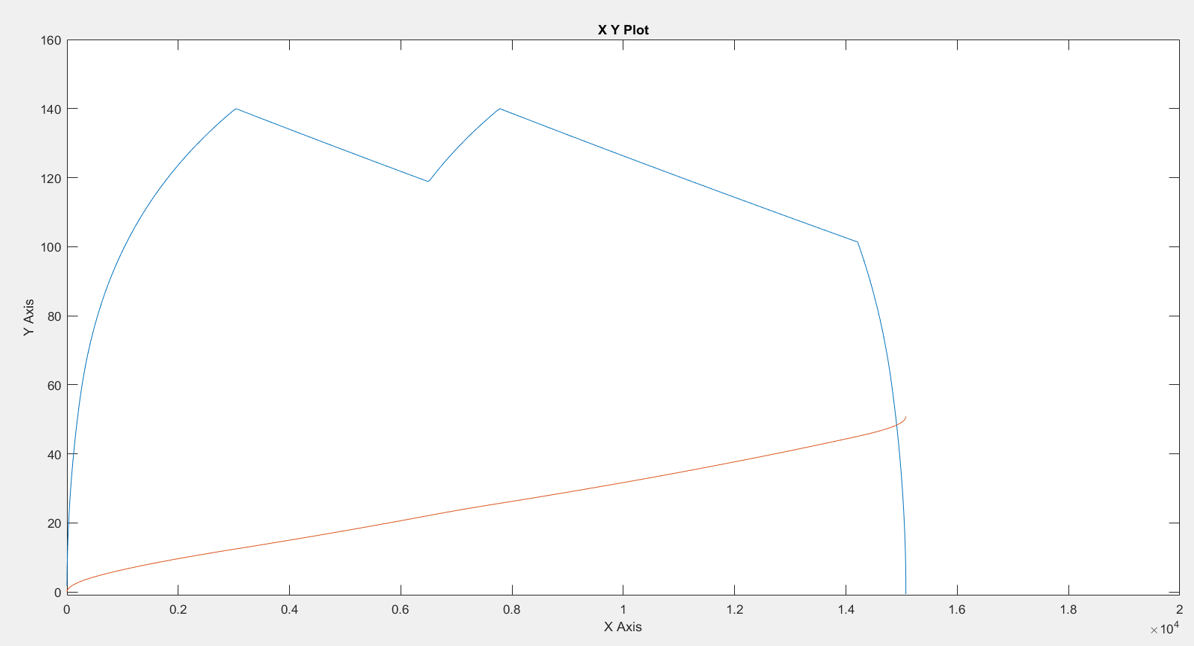 Рисунок 5 Графики траекторий v(S) и t(S) программ нагона отклонения времени от графика движения при корректировке по времени дополнительного движения в тяге, по координате пути тягового режима и координате скорости отключения тяги изображены на рисунках 6-20. Графики траекторий при корректировке по времени на рисунках 6-10. 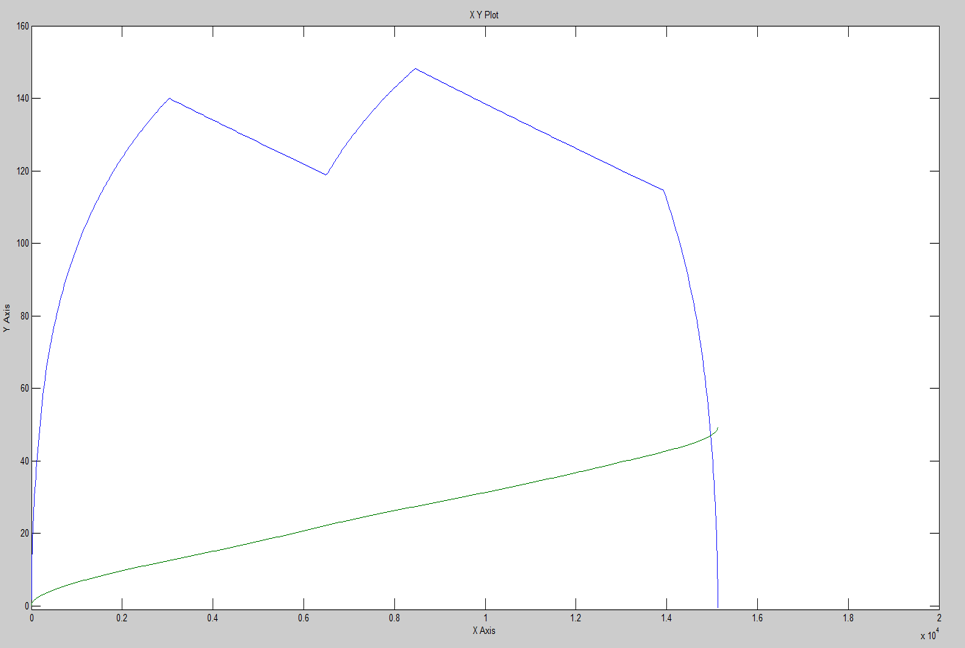 Рисунок 6 – опоздание 20 с. 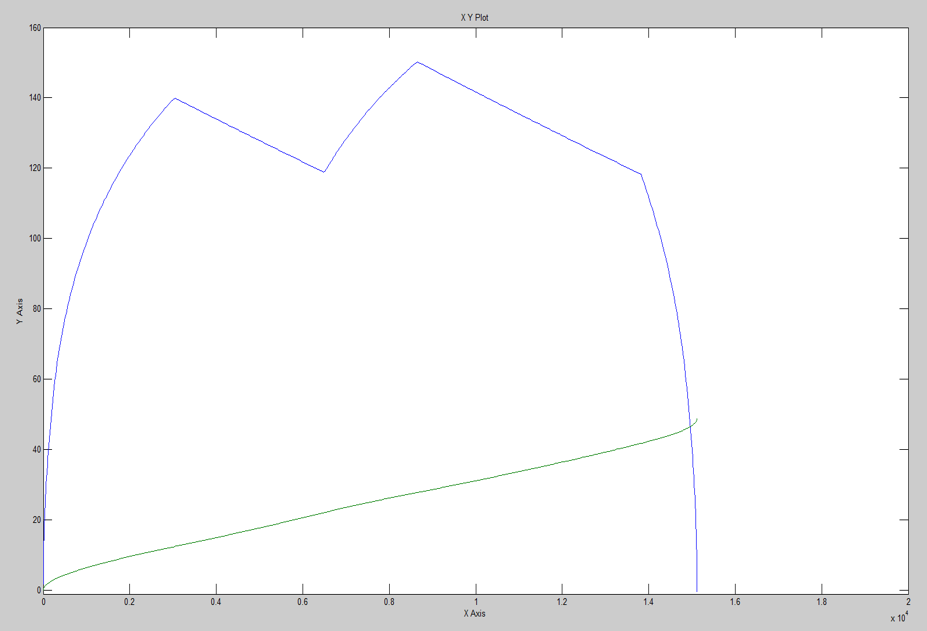 Рисунок 7 – опоздание 40 с. 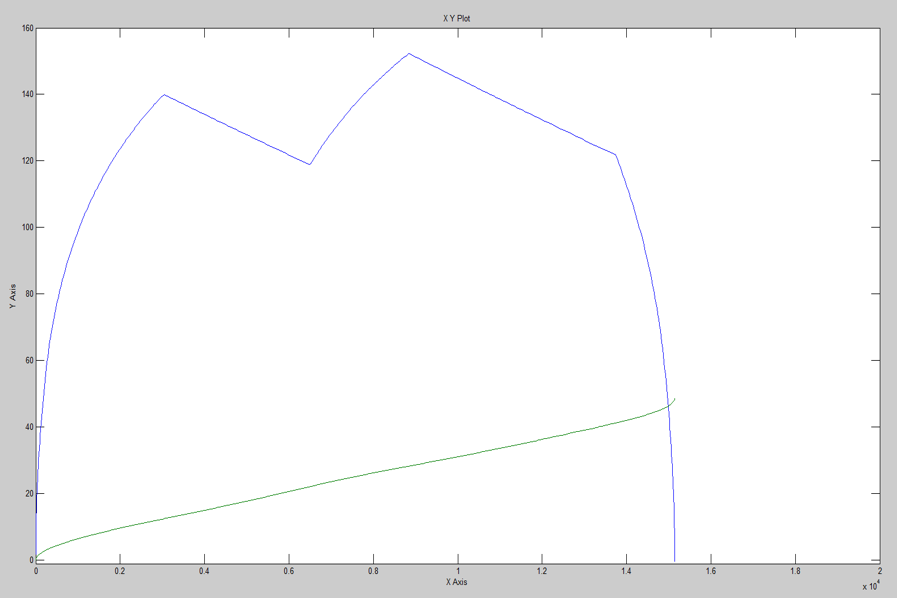 Рисунок 8 – опоздание 60 с. 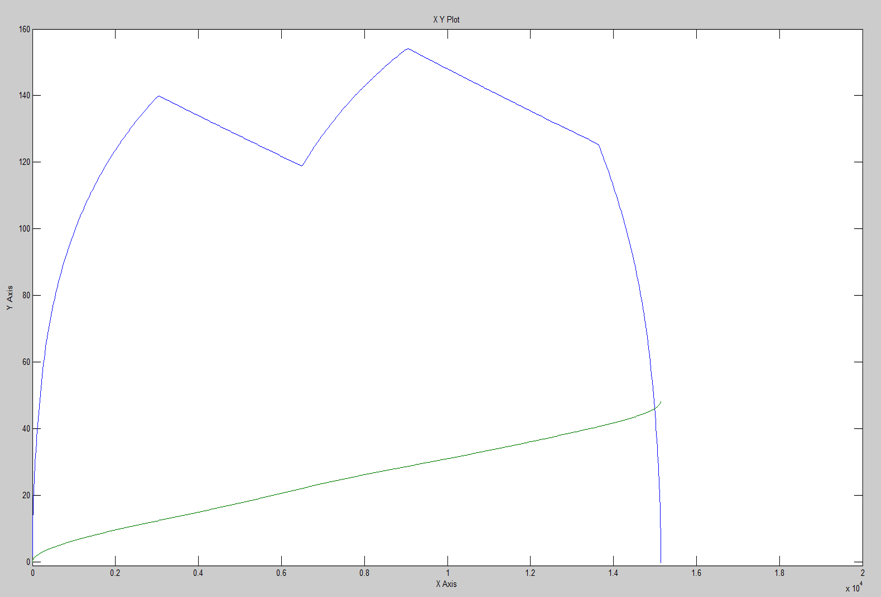 Рисунок 9 – опоздание 80 с. 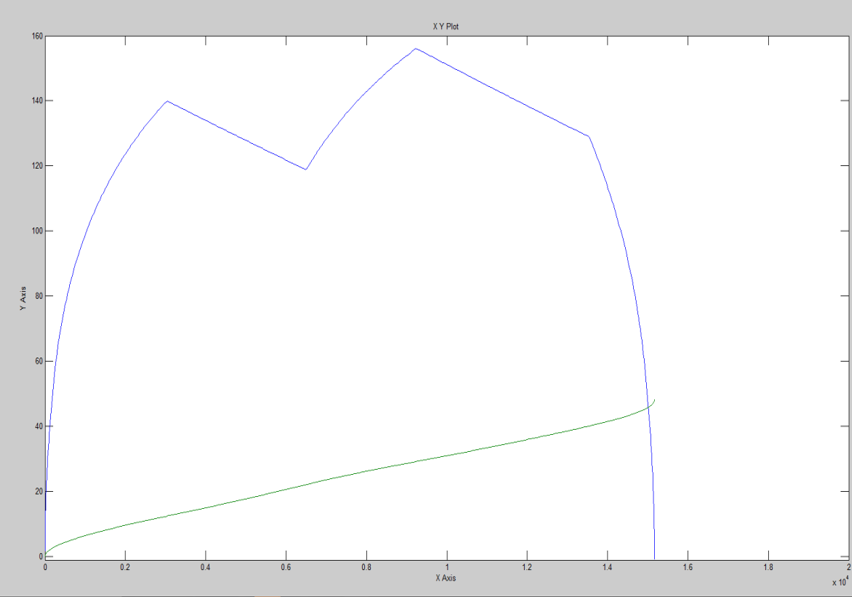 Рисунок 10 – опоздание 100 с. Графики траекторий при корректировке по пути на рисунка 11-15. 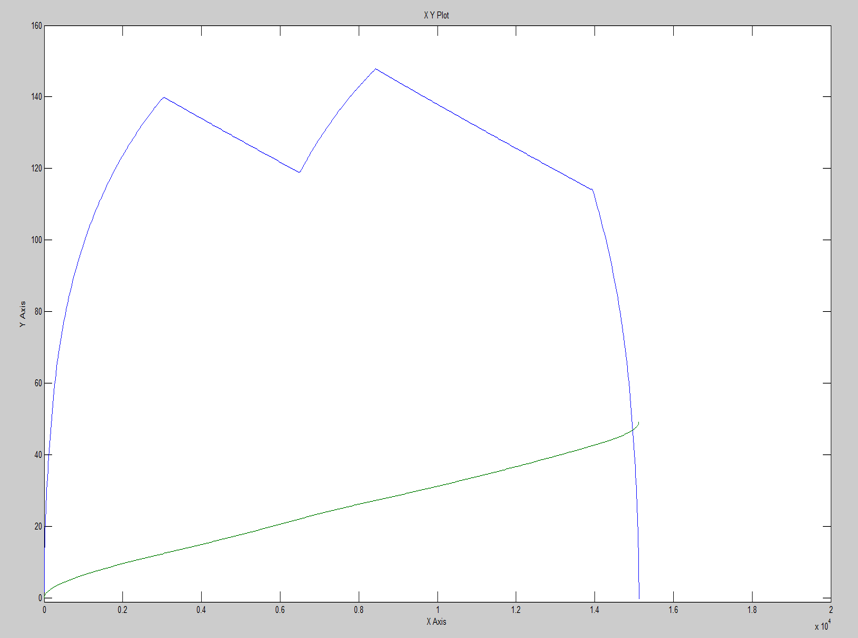 Рисунок 11 – опоздание 20 с. 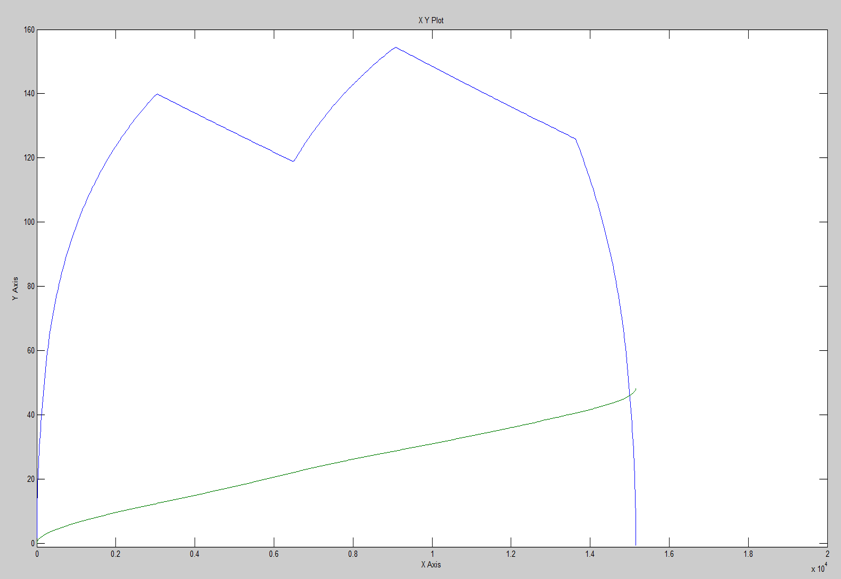 Рисунок 12 – опоздание 40 с. 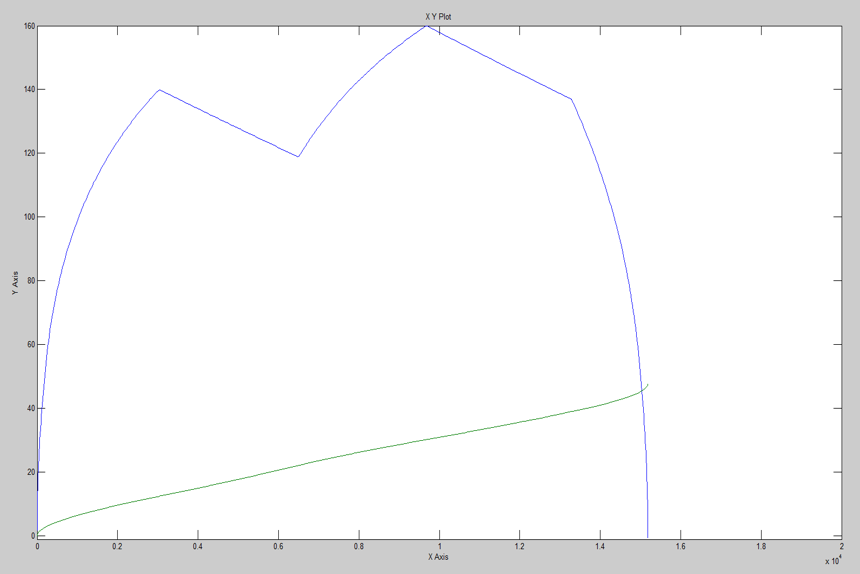 Рисунок 13 – опоздание 60 с. 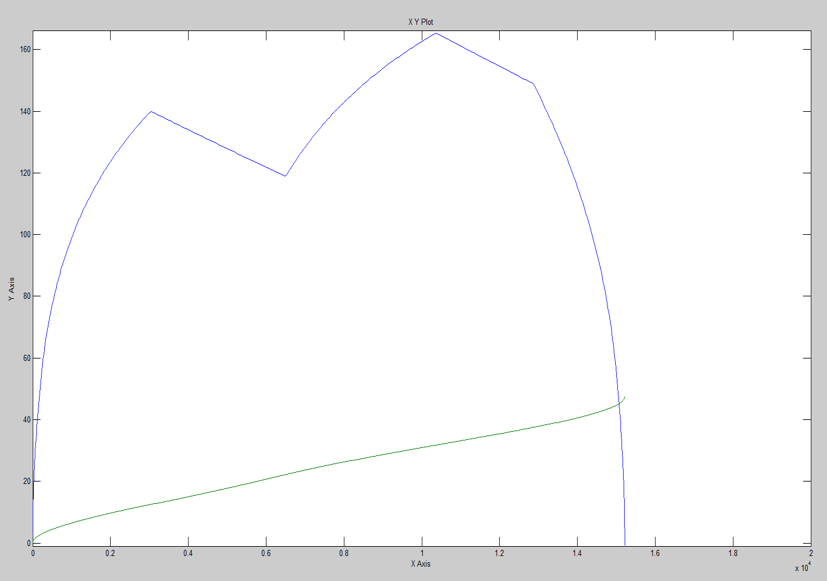 Рисунок 14 – опоздание 80 с. 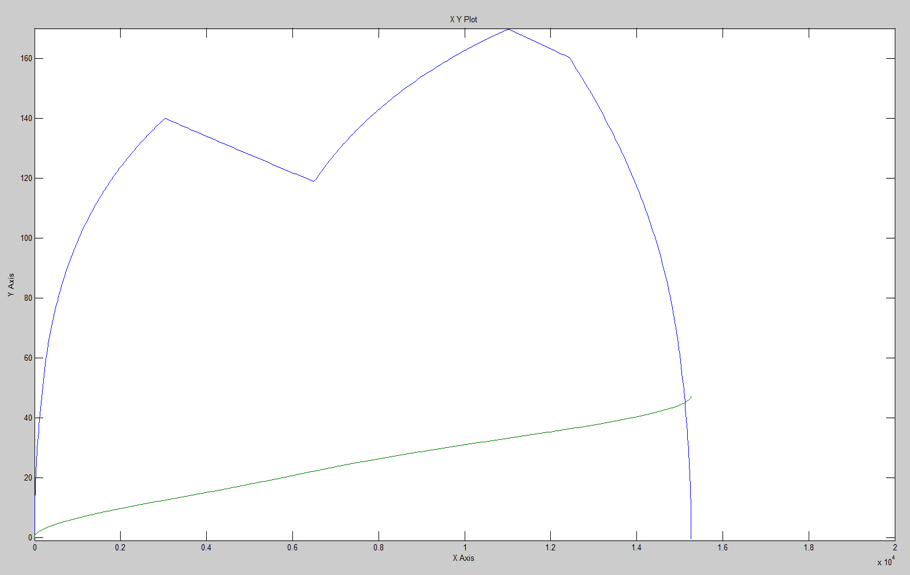 Рисунок 15 – опоздание 100 с. Графики траекторий при корректировке по скорости на рисунках 16-20. 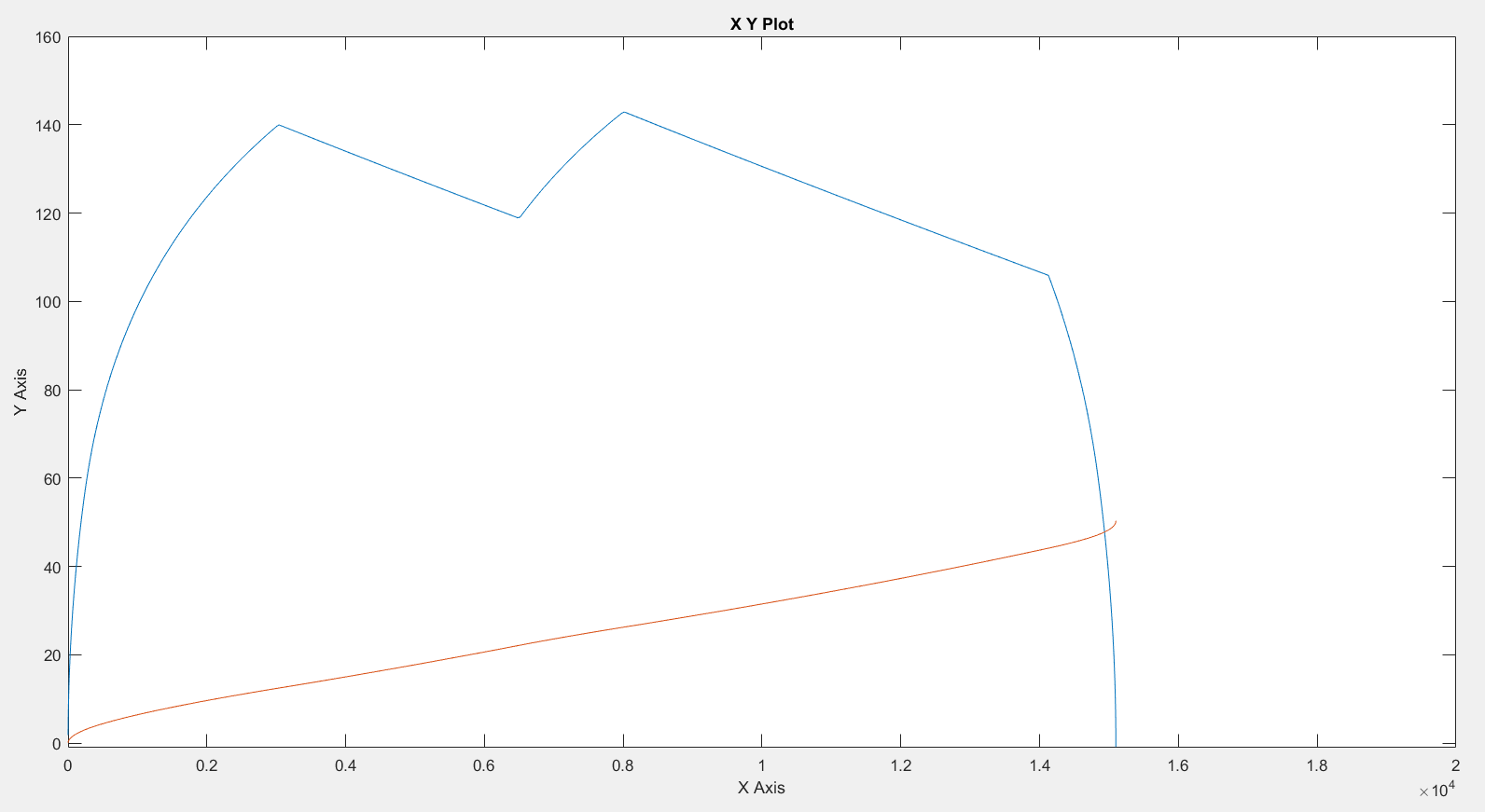 Рисунок 16 – опоздание 20 с. 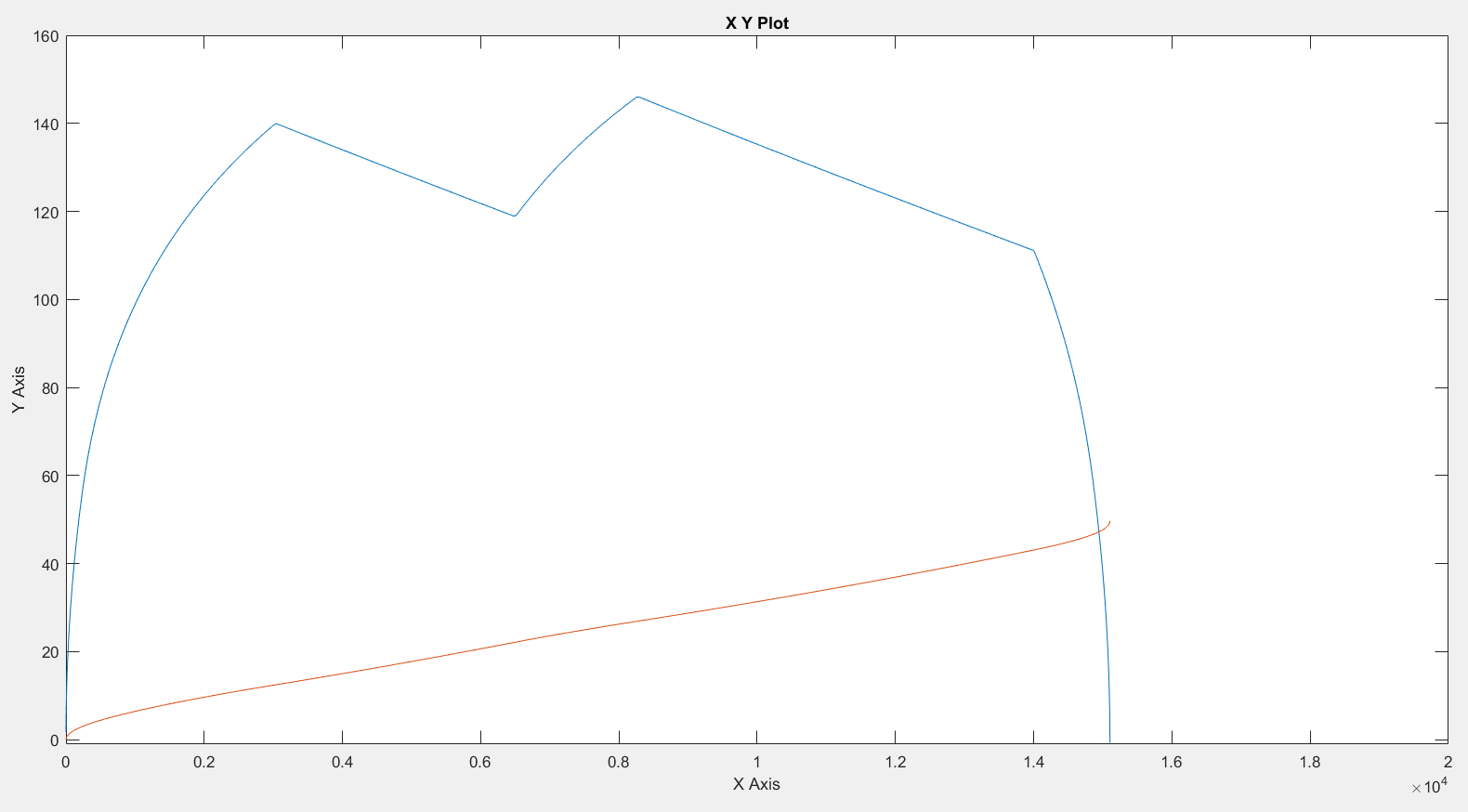 Рисунок 17 – опоздание 40 с. 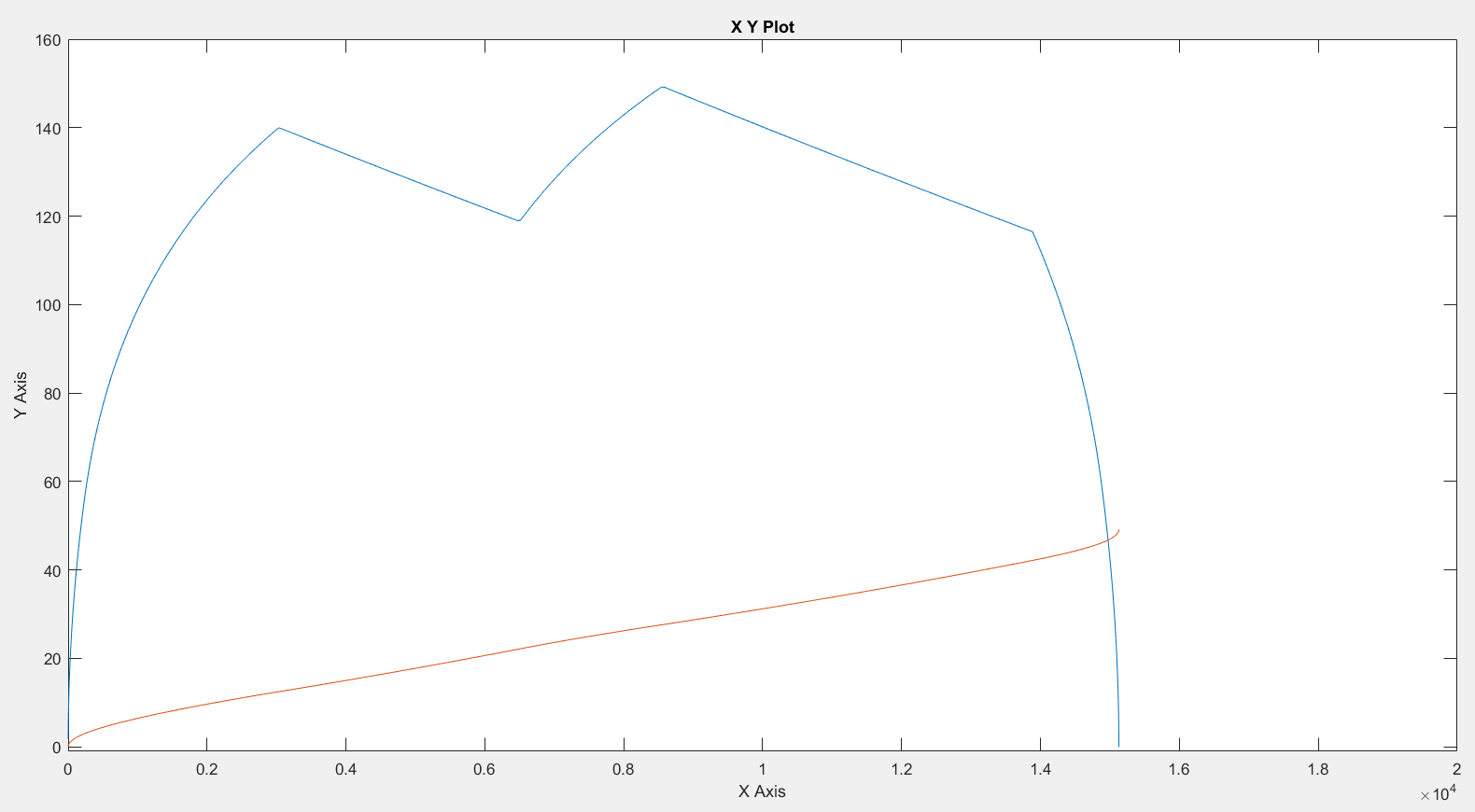 Рисунок 18 – опоздание 60 с. 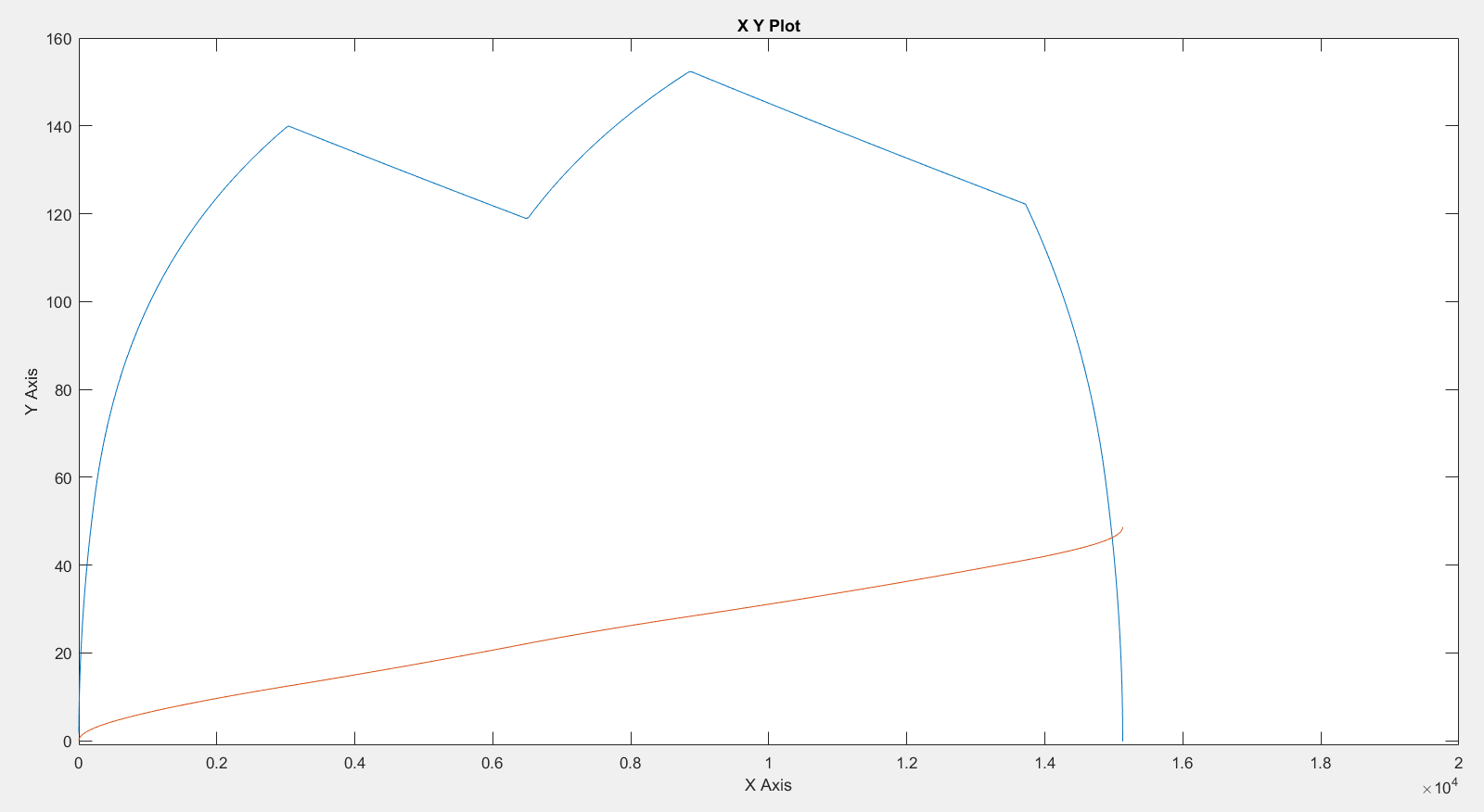 Рисунок 19 – опоздание 80 с. 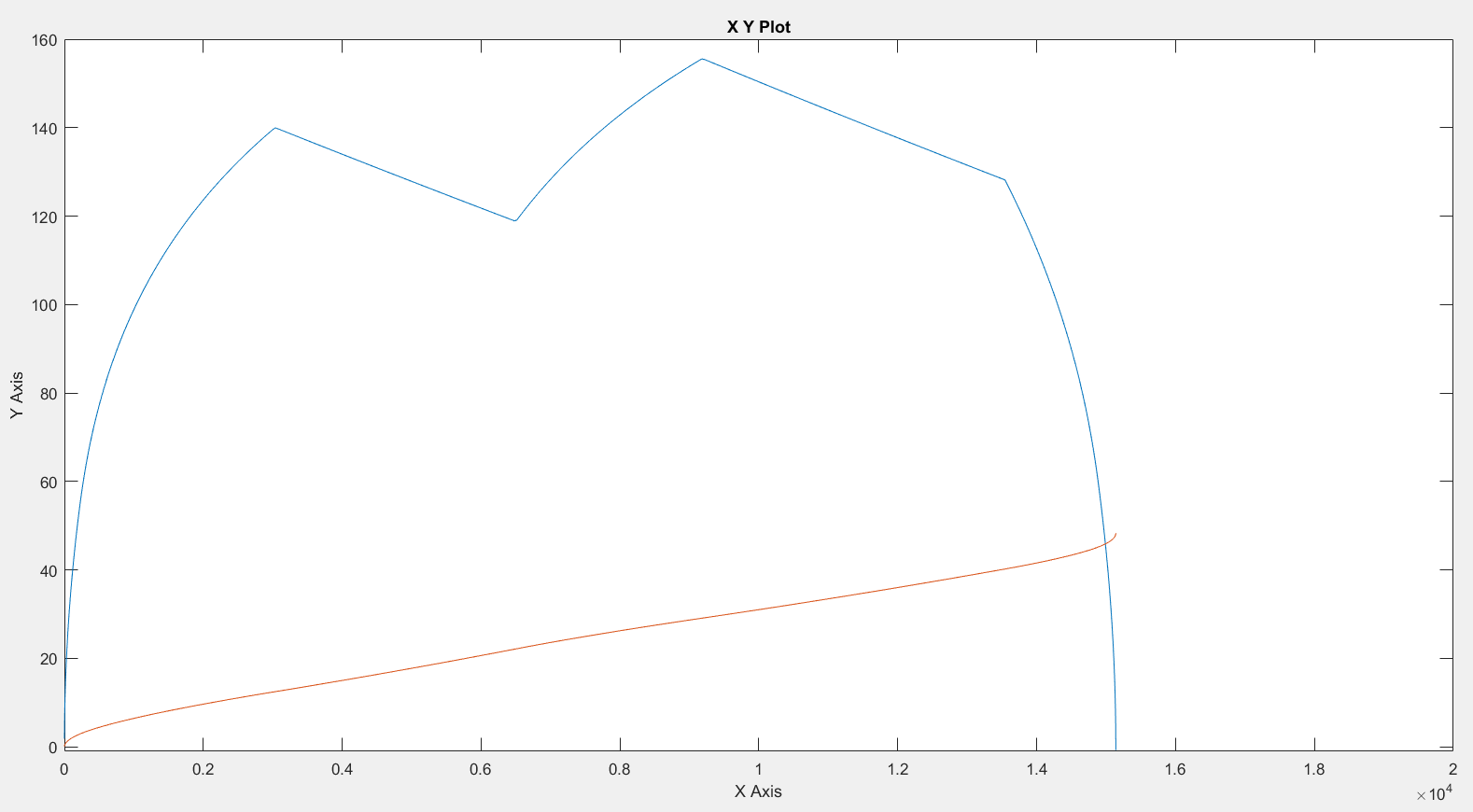 Рисунок 20 – опоздание 100 с. На рисунке 21 и 22 представлены номинальная и изменённая сила тяги   Рисунок 9 – Сила тяги (номинальная) Рисунок 10 – Сила тяги (изменённая) На рисунке 23 представлена тормозная характеристика  Рисунок 23 – Тормозная характеристика Выводы: В случае использования в качестве независимой переменной скорости расчет на каждом шаге производится в следующем порядке: Vi ti si. При приращении времени следует, что величины сопротивления движению в пути "запаздывают" на один шаг расчета вследствие того, что нам еще неизвестна координата поезда на данном шаге расчета. Это приводит к некоторой погрешности вычислений. В случае использования в качестве независимой переменной временирасчет на каждом шаге производится в следующем порядке: ti Vi si. В данном случае "запаздывают" все составляющие удельной равнодействующей силы, но нет проблем с установившимся режимом движения. При использовании в качестве независимой переменной путирасчет на каждом шаге производится в следующем порядке: si Vi ti. Наименьшую погрешность алгоритм движения по скорости, который является наилучшим. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||