Курсовая по Теории автоматического управления. Курсовая. Пояснительная записка к курсовой работе по дисциплине Основы теории автоматического управления
 Скачать 0.89 Mb. Скачать 0.89 Mb.
|

|
Оценка работы: ________________ А1222 06 393512 000 000 ПЗ Разработка и моделирование систем автоматического управления Пояснительная записка к курсовой работе по дисциплине «Основы теории автоматического управления»
ЗаданиеПостроить модель объекта управления двумя способами: многоконтурную систему подчинённого регулирования. Система должна быть разработана в двух вариантах: непрерывном и дискретном. Для разработки многоконтурной системы объект должен быть представлен в виде схемы из звеньев с известными передаточными функциями. Все звенья модели должны быть реальными. В явном виде на схеме должны присутствовать переменные u, x, y, z. К системам предъявляются следующие требования: Время переходного процесса tпп = 0.2+0.25*N = 0.2+0.25*6= 1.7 с; Погрешность времени переходного процесса во всех случаях не должна превышать 2%; Системы должны иметь первый порядок астатизма; В управляющей части многоконтурного управления использовать только звенья типа пропорциональный усилитель, интегратор и реальный дифференциатор; Вид переходного процесса должен соответствовать распределению полюсов по Баттерворту. Выполнение заданных требований должно быть подтверждено моделированием в MATLAB-Simulink. ОглавлениеЗадание 2 Исходные данные 4 1.Подготовка моделей объекта управления 5 1.1 Модель ОУ для многоконтурной САР 5 2.Разработка и моделирование непрерывной многоконтурной САР 6 2.1 Разработка непрерывной многоконтурной САР 6 2.2 Моделирование непрерывной многоконтурной САР 10 3.Разработка и моделирование дискретной многоконтурной САР 13 3.1. Разработка дискретной многоконтурной САР 13 3.2 Моделирование дискретной многоконтурной САР 16 Исходные данныеВарианту № 6 соответствует следующая система уравнений, описывающих объект управления (ОУ):  , где , гдеx, y, v – внутренние переменные ОУ, u – задающее воздействие, z – главная регулируемая величина. Переменные x, y, z, а также их производные доступны для прямого измерения, а переменная v не доступна для измерения, при этом v = Nu, где N – номер варианта. Тогда v = 6u. Все переменные являются функциями времени. Подготовка моделей объекта управления1.1 Модель ОУ для многоконтурной САРСогласно заданию, ОУ описывается следующими уравнениями:  Преобразование Лапласа:  Выразим переменные:  По данным уравнения составим модель объекта управления:  Рисунок 1. Исходная модель объекта управления Разработка и моделирование непрерывной многоконтурной САР2.1 Разработка непрерывной многоконтурной САРВ общем виде система должна принять следующий вид (рис. 5):  Рисунок 2. Общий вид многоконтурной системы автоматического регулирования    Так как в системе объекта управления присутствует обратная связь, то, согласно рисунок 2, ее необходимо компенсировать. Она примет следующий вид (рисунок 3):  Рисунок 3. Модель объекта управления с компенсацией обратной связи Исходя из заданных свойств системы, необходимо принять желаемую передаточную функцию системы. В нашем случае это будет апериодическое звено первого порядка. Для него желаемая передаточная функция примет следующий вид:  Для обеспечения выполнения требования по порядку астатизма K = 1. Передаточная функция такой системы в разомкнутом виде будет следующая:  Путем перехода от желаемой функции замкнутой системы к желаемой функции разомкнутой получим переходную функцию регулятора:  Найдем регуляторы первого, второго и третьего контура исходя из полученной функции:    Где   Данные звенья получились идеальными, поэтому необходимо привести их к реальным:     Рисунок 4. Регулятор третьего контура Звено 10.5857 регулятора R3(p) – является пропорциональным звеном.  Рисунок 5. Регулятор второго контура Звено  регулятора R2(p) – является интегрирующим звеном. регулятора R2(p) – является интегрирующим звеном. Рисунок 6. Регуляторы первого контура Так как звено R2(p) было нереализуемым, было принято решение ввести переменную Tдp, при этом значение Tд должно быть в пределах 0.002…0.1. По результатам построений было принято решение взять 0.002. Звено  регулятора R3(p) – является интегральным звеном. регулятора R3(p) – является интегральным звеном.В конечном виде схему можно представить следующим образом (рисунок 7):  Рисунок 7. Многоконтурная система автоматического регулирования 2.2 Моделирование непрерывной многоконтурной САРСобранная модель представлена на рис. 8.  Рисунок 8. Система многоконтурного управления в matlab График выходной величины z при единичном ступенчатом сигнале в качестве задания показан на рис. 9. При дальнейшем изучении процесса видно, что требования соблюдены: порядок астатизма равен единицы (установившаяся ошибка равна нулю, рис. 10), распределение полюсов соответствует Баттерворту (перерегулирование не больше 8%, рис. 11), погрешность времени переходного процесса не превышает 2% (при tпп = 1.7 сдопустимый диапазон составит 1.666...1.734 с,рис. 12).  t, c z 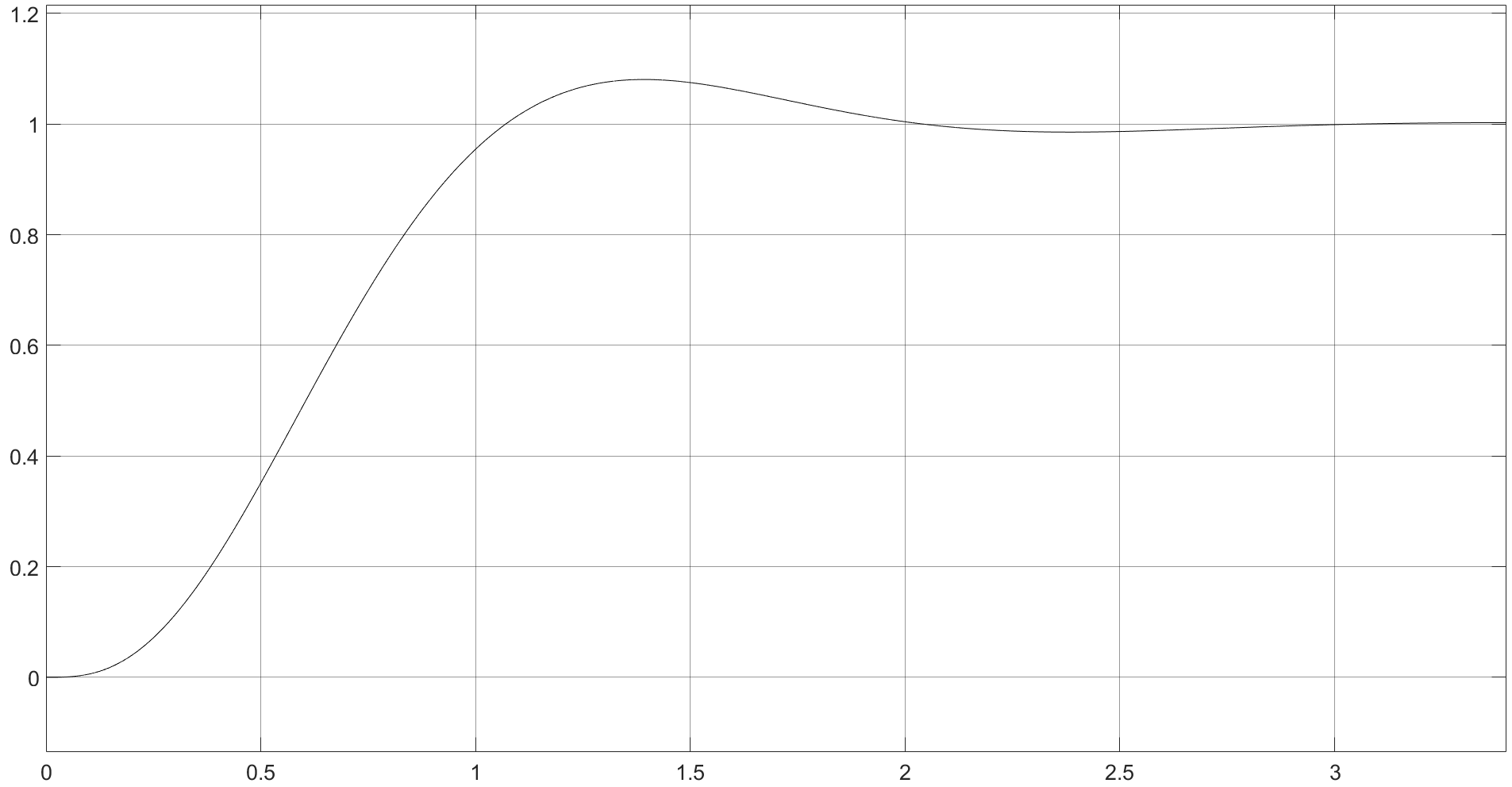 Рисунок 9. Реакция многоконтурной системы управления на единичный сигнал управления t, c z  Рисунок 10. Статическая ошибка многоконтурной системы управления t, c z  Рисунок 11. Перерегулирование многоконтурной системы управления z t, c  Рисунок 12. Время переходного процесса многоконтурной системы управления Разработка и моделирование дискретной многоконтурной САР3.1. Разработка дискретной многоконтурной САРПо правилу трапеций принимаем  , где Т – период дискретности , где Т – период дискретностиДля звена R3.1:     Для звена R2.1:      Для звена R1.1:     Для звена R1.2:      Алгоритм работы представлен на рис.13.  Рисунок 13. Алгоритм работы контроллера дискретной многоконтурной системы автоматического регулирования 3.2 Моделирование дискретной многоконтурной САРСозданная модель рис. 14:  Рисунок 14. Система дискретной многоконтурной системы автоматического управления в matlab Модуль подсистемы рис. 15: 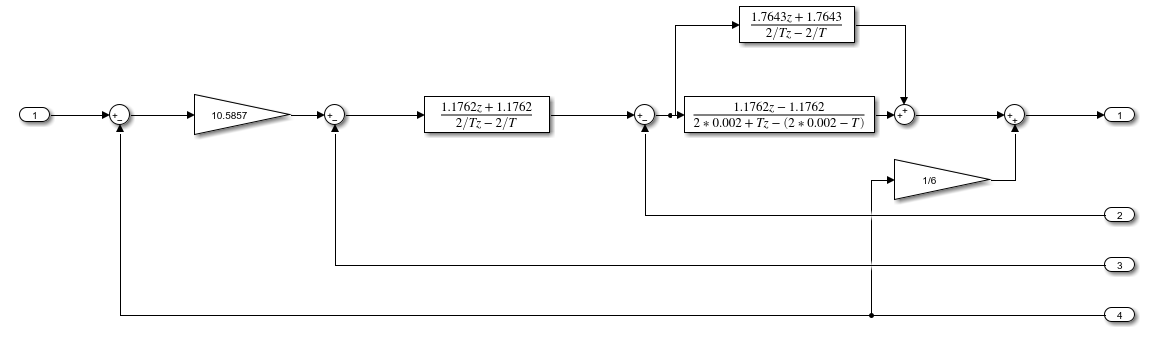 Рисунок 15. Подсистема дискретной многоконтурной системы автоматического управления в matlab График выходной величины z при единичном ступенчатом сигнале показан на рис. 16. Как можно видеть на нем отличия дискретной САР от непрерывной мало при малом периоде дискретности Т. z – непрерывная система z* - дискретная система t, c z z*  Рисунок 16. Сравнение реакций непрерывной и дискретной систем много контурного управления При изучении графика видно, что все требования соблюдены: порядок астатизма равен единицы (установившаяся ошибка равна нулю, рис. 17), распределение полюсов соответствует Баттерворту (перерегулирование не больше 8%, рис. 18), погрешность времени переходного процесса не превышает 2% (при tпп = 1.7 сдопустимый диапазон составит 1.666...1.734 с,рис. 19). t, c z = z* z z* Рисунок 17. Статическая ошибка дискретной многоконтурной системы автоматического управления z – непрерывная система t, c z* - дискретная система z z*  Рисунок 18. Сравнение перерегулирования непрерывной и дискретной многоконтурной системы автоматического управления z – непрерывная система z* - дискретная система t, c z z*  Рисунок 19. Сравнение времени переходного процесса непрерывной и дискретной системы автоматического управления Для подбора максимального периода дискретности, при котором САР удовлетворяет требованию  , был проведен ряд опытов, результаты которых представлены в табл. 1. Период дискретности подбирался с точностью в 0,001 с. В результате было выбрано значение T = 0,01 с. , был проведен ряд опытов, результаты которых представлены в табл. 1. Период дискретности подбирался с точностью в 0,001 с. В результате было выбрано значение T = 0,01 с.Таблица 1. Подбор периода дискретности T
Модель дискретной системы с реализацией управляющей части во временной области представлена на рисунках 20, 21, 22. 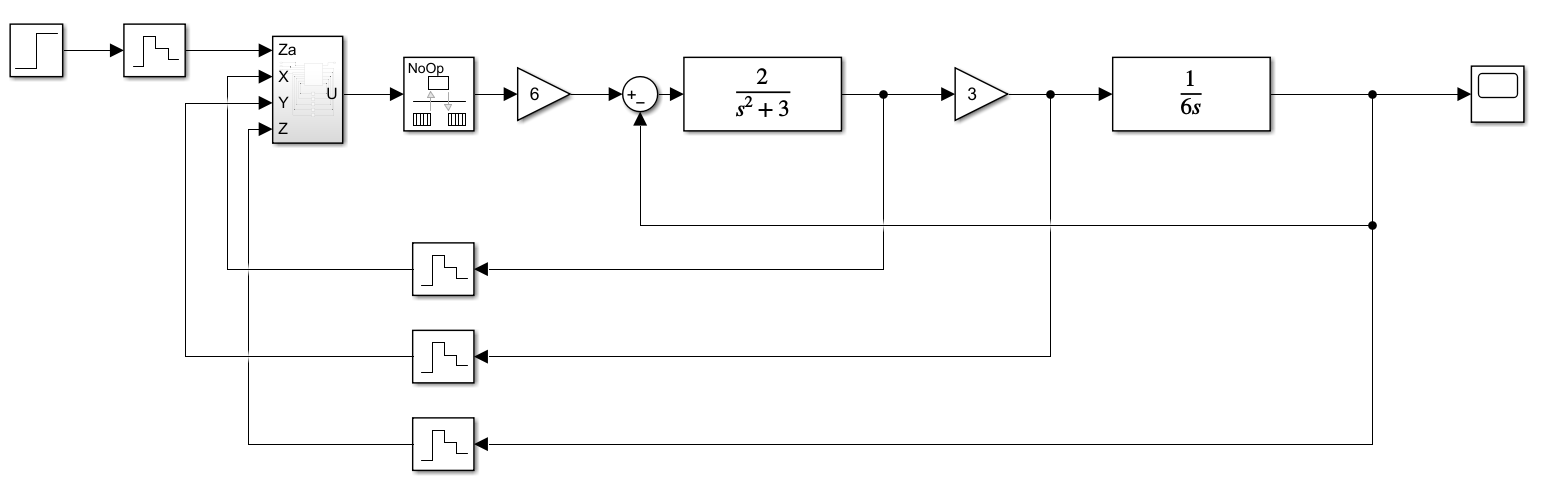 Рисунок 20. Модель дискретной системы с реализацией управляющей части во временной области Модуль подсистемы рис. 21 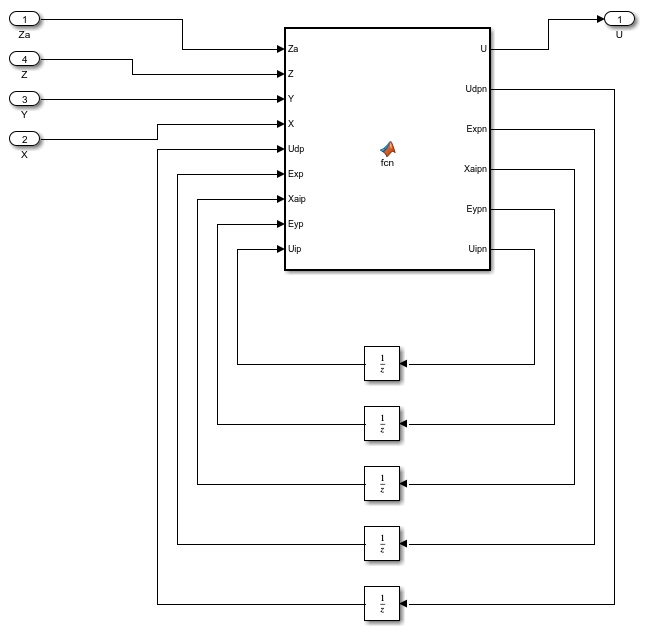 Рисунок 21. Модуль подсистемы модели дискретной системы с реализацией управляющей части во временной области Формулы, заложенные в функцию рис. 22  Рисунок 22. Формулы, заложенные в подсистему модели дискретной системы Результат моделирования системы и сравнение графиков рис. 23 t, c z = z* z z*  Рисунок 23. Сравнение реакций систем дискретных систем управления Результат работы двух систем представлен на рисунке 24 (z – непрерывная многоконтурная САР, z* - дискретная многоконтурная САР)   z* z Рисунок 24. Результат реакций непрерывной и дискретной много контурной системы управления z* z t, c 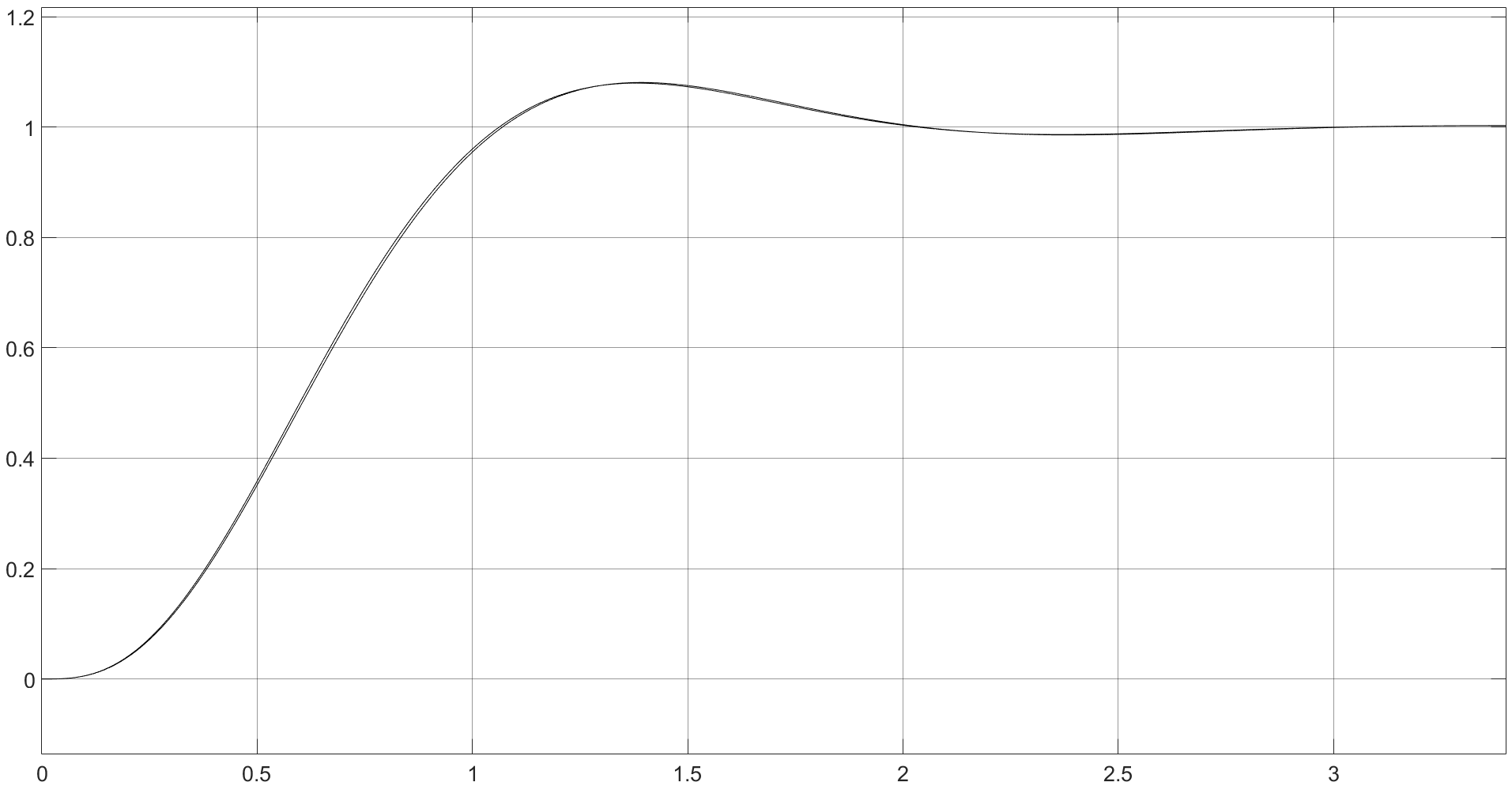 |