Пояснительная записка к курсовому проекту по дисциплине Системы управления электроприводов автоматизированный электропривод
 Скачать 0.6 Mb. Скачать 0.6 Mb.
|

|
Федеральное Агентство по образованию РФ Санкт-Петербургский государственный электротехнический университет «ЛЭТИ» Кафедра РАПС Пояснительная записка к курсовому проекту по дисциплине «Системы управления электроприводов» АВТОМАТИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД ПРОМЫШЛЕННОГО МЕХАНИЗМА 23 вариант Выполнил студент гр. 5403: Вася Пупкин Проверил: Соколовский Гэ. Гэ. Санкт-Петербург 2009г Содержание 1. Исходные данные ……………………………………..……………………………………………………………………..3 2. Расчет усилий и моментов ……………………………………………….………………………………………………4 3. Нагрузочные и скоростные диаграммы………………………….……………………………………………….6 4. Выбор мотор-редуктора…………………………………………………..………………………………………………7 5. Проверка двигателя на нагрев…………………………………………………………………………………….…..8 6. Выбор преобразователя и схема его подключения…………………………………………………….....9 7. Структурная схема системы управления, выбор структуры и расчет параметров регуляторов………………………………………………………………………………………………………………………...11 8. Расчетная схема системы управления привода в среде MATLAB Simulink…………………..14 9. Результаты моделирования динамических процессов при малых входных воздействиях и в заданных рабочих режимах……………………………………………………………….…16 10. Выводы по результатам проектирования…………………………………………………………………...19 Список литературы………………………………………………………………………………………………………….….19 Исходные данные Электропривод суппорта токарного станка
На рис. 1 приведено схематическое изображение токарного станка. Обрабатываемая деталь левым концом закреплена в патроне (или на планшайбе) передней бабки. Правый конец удерживается на задней бабке так, что деталь имеет возможность вращаться. Вращение детали осуществляется главным приводом, расположенным в передней бабке. На суппорте крепится режущий инструмент (резец), которым обрабатывается деталь. Привод суппорта включает в себя двигатель подачи (мотор-редуктор), вращающий ходовой винт шарико-винтовой передачи, Связь ходового винта с суппортом осуществляется через гайку, жестко связанную с суппортом. При рабочем ходе суппорт перемещается в продольном направлении (на рисунке слева направо) и происходит обработка детали резцом. При обратном ходе суппорт возвращается в исходное состояние. При обратном ходе процесс резания отсутствует. Привод суппорта запускается до начала обработки детали. После выхода на рабочую скорость резец подводится к детали и начинается процесс резания. 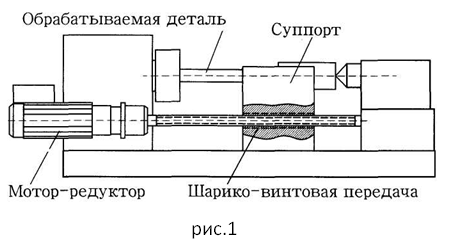 Расчет усилий и моментов Усилие для преодоления трения скольжения при движении суппорта по направляющим:   Максимальное усилие на суппорте при установившемся движении в процессе резания:   7445.5 Н 7445.5 НМаксимальная угловая скорость ходового винта в процессе резания:  Максимальная угловая скорость ходового винта при обратном ходе суппорта:  Пассивный момент нагрузки на ходовом винте в процессе резания с учетом коэффициента запаса Kзап=1.3:  Пассивный момент нагрузки на ходовом винте без процесса резания при прямом ходе с учетом коэффициента запаса Kзап=1.3:  Пассивный момент нагрузки на ходовом винте при обратном ходе суппорта с учетом Kзап  Мощность на ходовом винте, необходимая для движения суппорта с максимальной скоростью в процессе резания:  Время разгона и равное ему время торможения  (без процесса резания): (без процесса резания): Максимальное угловое ускорение ходового винта:  Время работы привода на установившейся скорости в процессе резания:  Время работы привода на установившейся скорости при обратном ходе:  Момент инерции суппорта, приведенный к ходовому винту (выходному валу редуктора):  Движущий момент на ходовом винте, в зависимости от режима:   Нагрузочные и скоростные диаграммы  = =  = =  = =  = =  = =  = =  T1= 1.6 с T2= не учитывается, в связи с очень малым значением T3= 250 с T4= 1.6 с Т5= 3.2 с Т6= 125 с T7=3.2 c Tцикла= 394.2 с Н 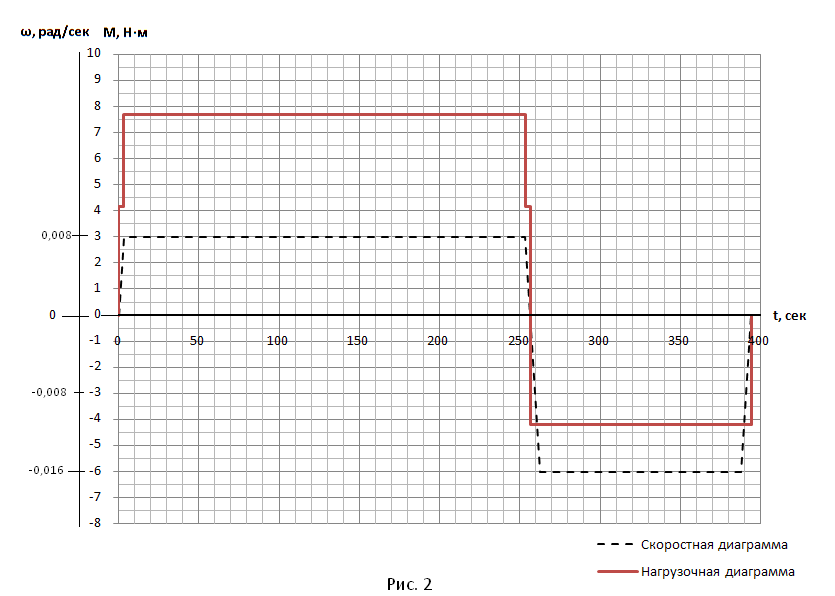 а рис 2. Представлены нагрузочные и скоростные диаграммы: а рис 2. Представлены нагрузочные и скоростные диаграммы:Выбор мотор-редуктора    Исходя из этих, данный был выбран двигатель фирмы SEW DR 63M4.  Передаточное число:   -проверка по максимальному моменту -проверка по максимальному моменту  К двигателю был выбран редуктор R 07.  Момент инерции редуктора в расчётах будет не учитываться, т.к. он составляет менее 5% от момента инерции двигателя. Далее для расчёта в среде Matlab Simulink параметры двигателя будут выбраны в соответствии с двигателем DR 63M4. Проверка двигателя на нагрев    Выбор преобразователя и схема его подключения По рассчитанным данным подходит преобразователь фирмы SEW MOVIDRIVE MDX60 0005-5A3-4-0. 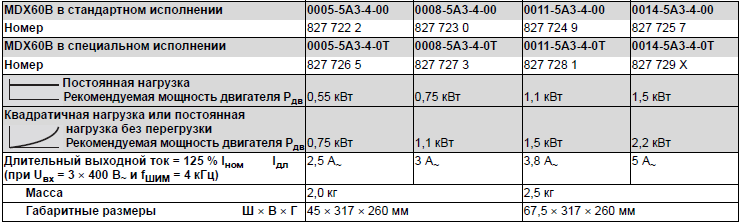 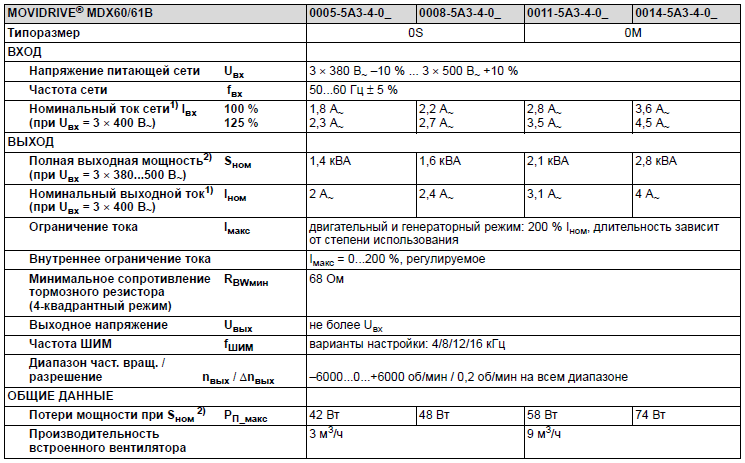 Мощность преобразователя 0.55 кВт. Схема подключения силовой части преобразователя: 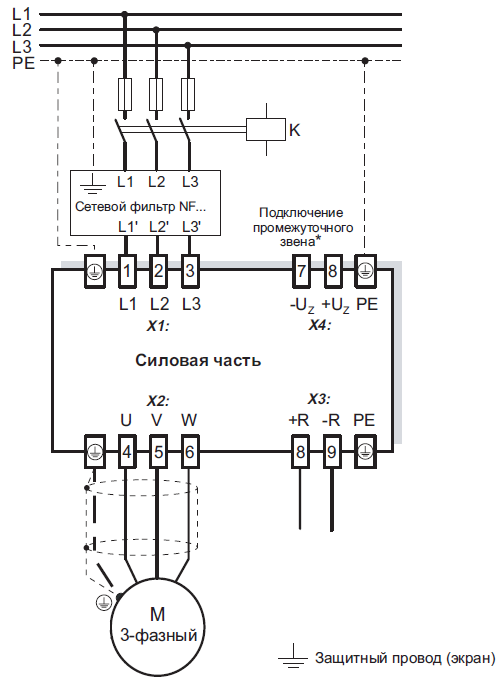 Подключение звезда. Структурная схема системы управления, выбор структуры и расчет параметров регуляторов 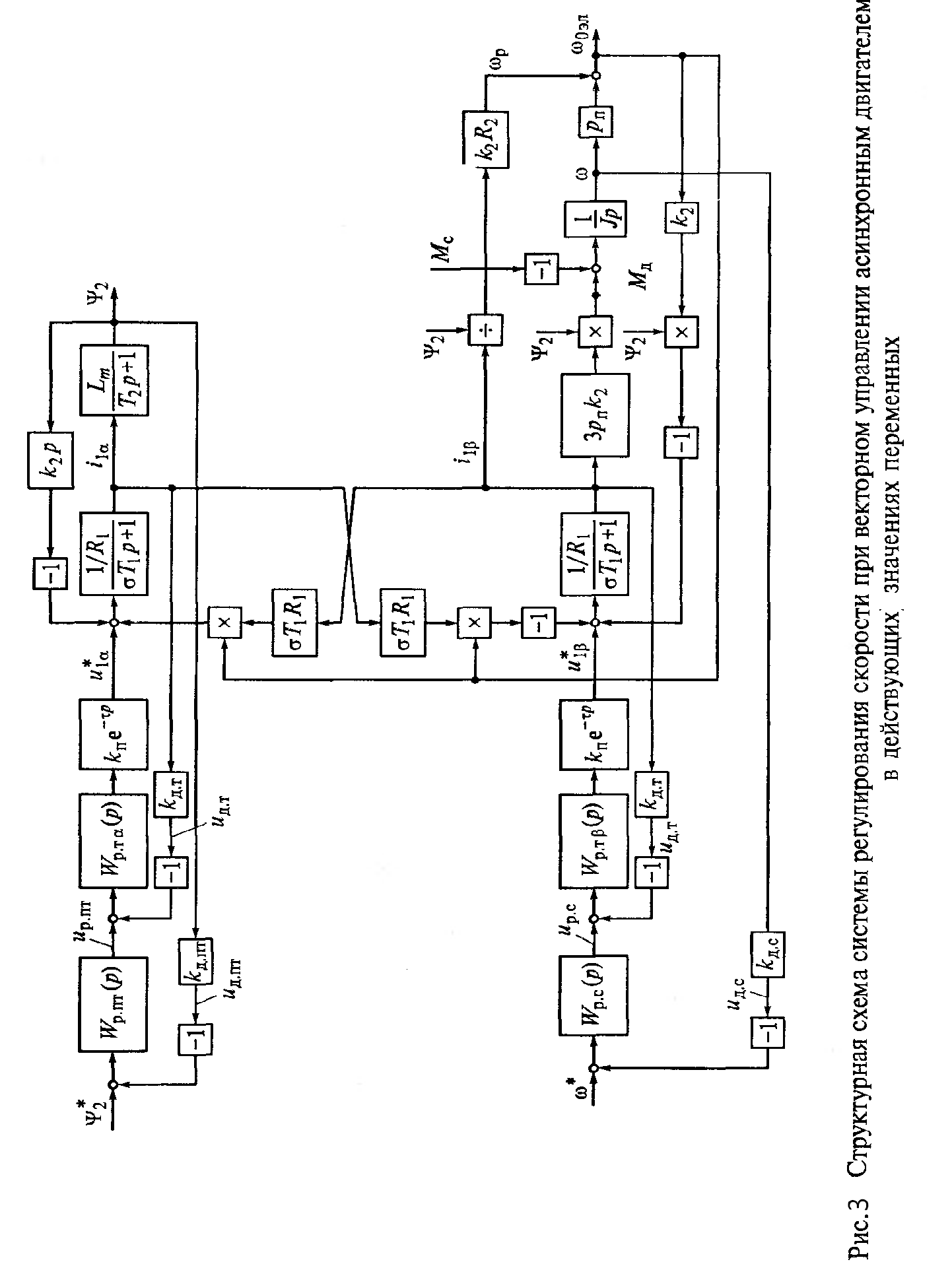 Настройка токовых контуров: Настройка контура регулирования потокосцепления ротора:      Настройка контура скорости: Расчетная схема системы управления привода в среде MATLAB Simulink Структурная схема всей системы:  Структурная схема асинхронного двигателя:  С 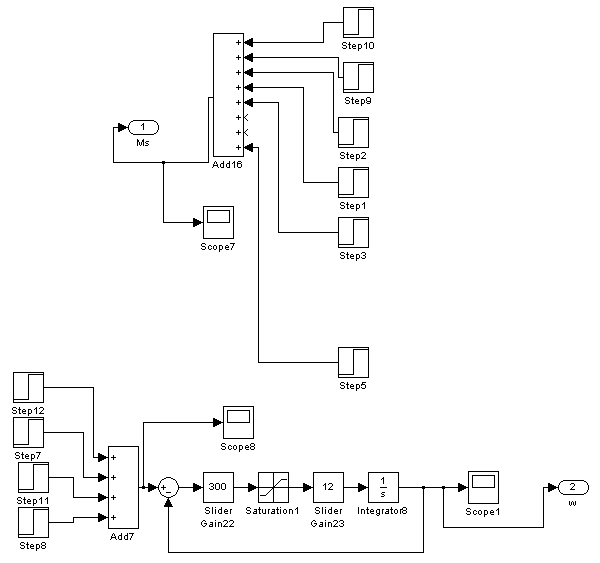 труктурная схема задатчиков скорости и момента: труктурная схема задатчиков скорости и момента:Результаты моделирования График момента сопротивления: 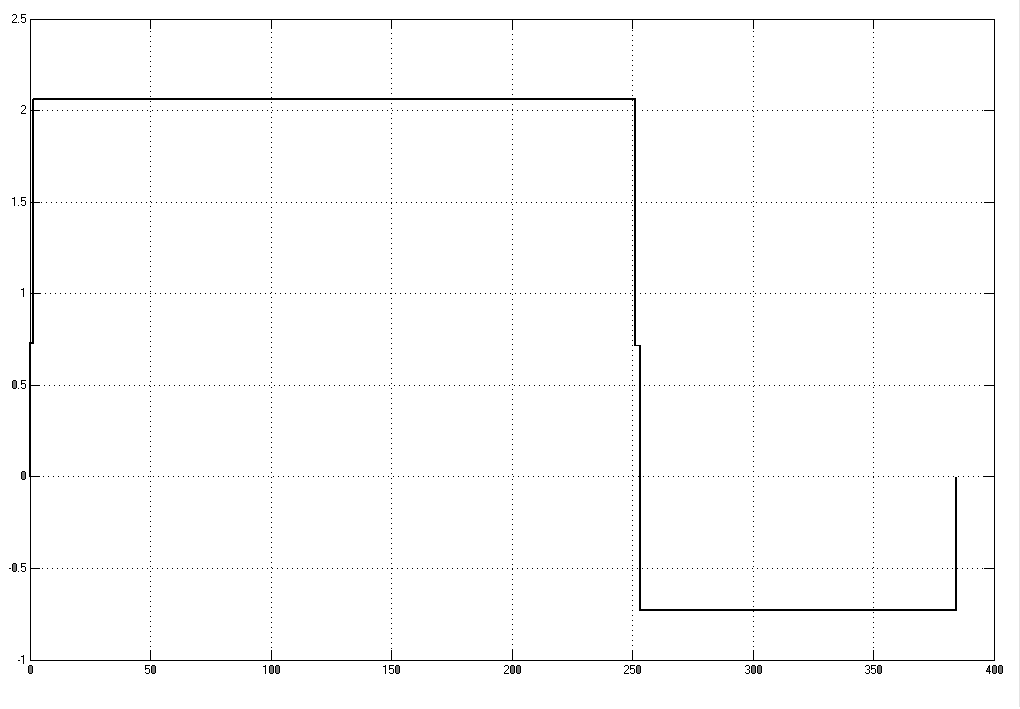 График скорости: 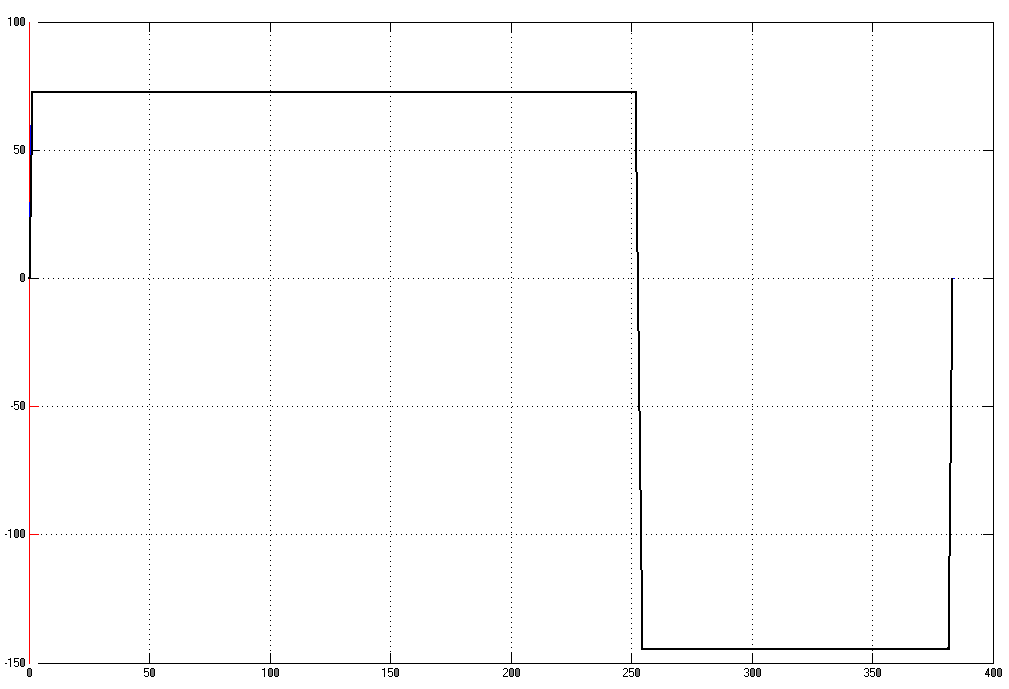 График реакции потока на малое входное воздействие: 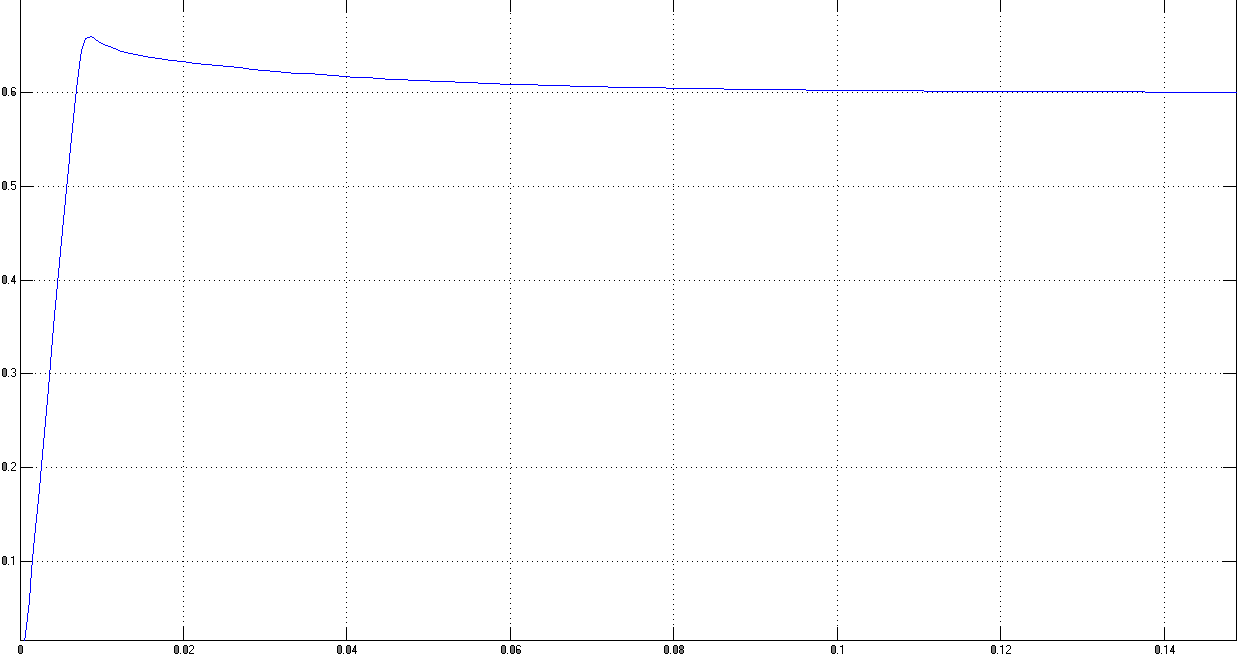 График реакции скорости на малое входное воздействие: 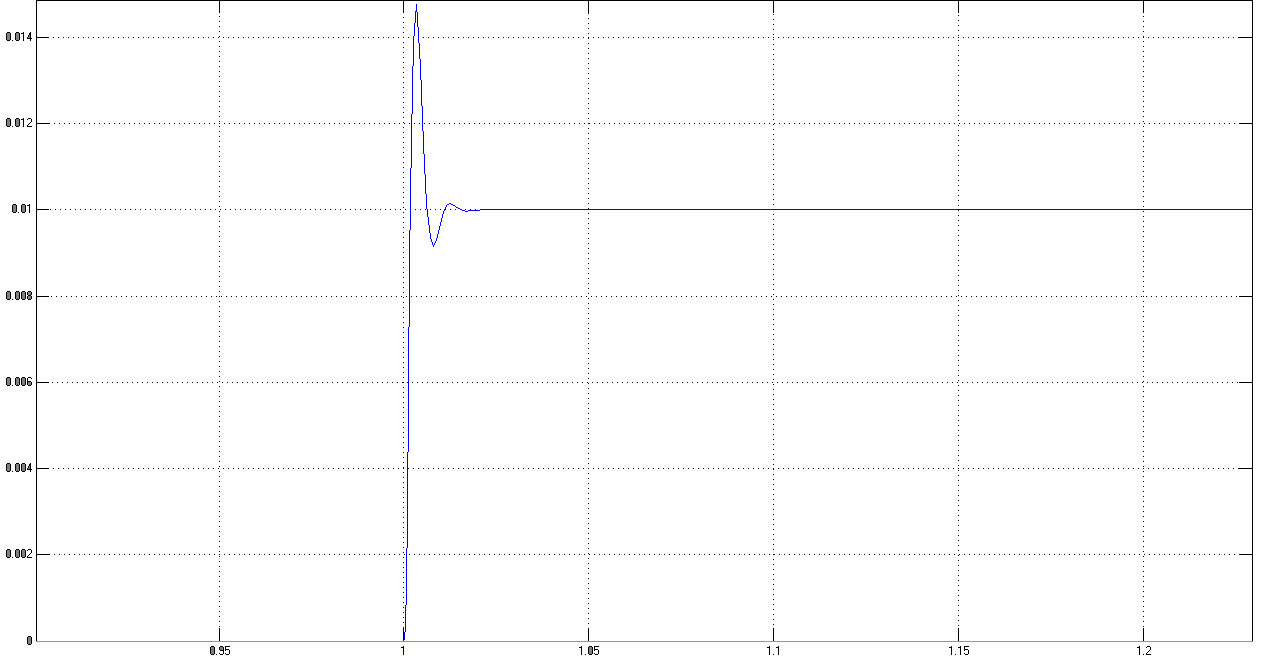 График момента двигателя: 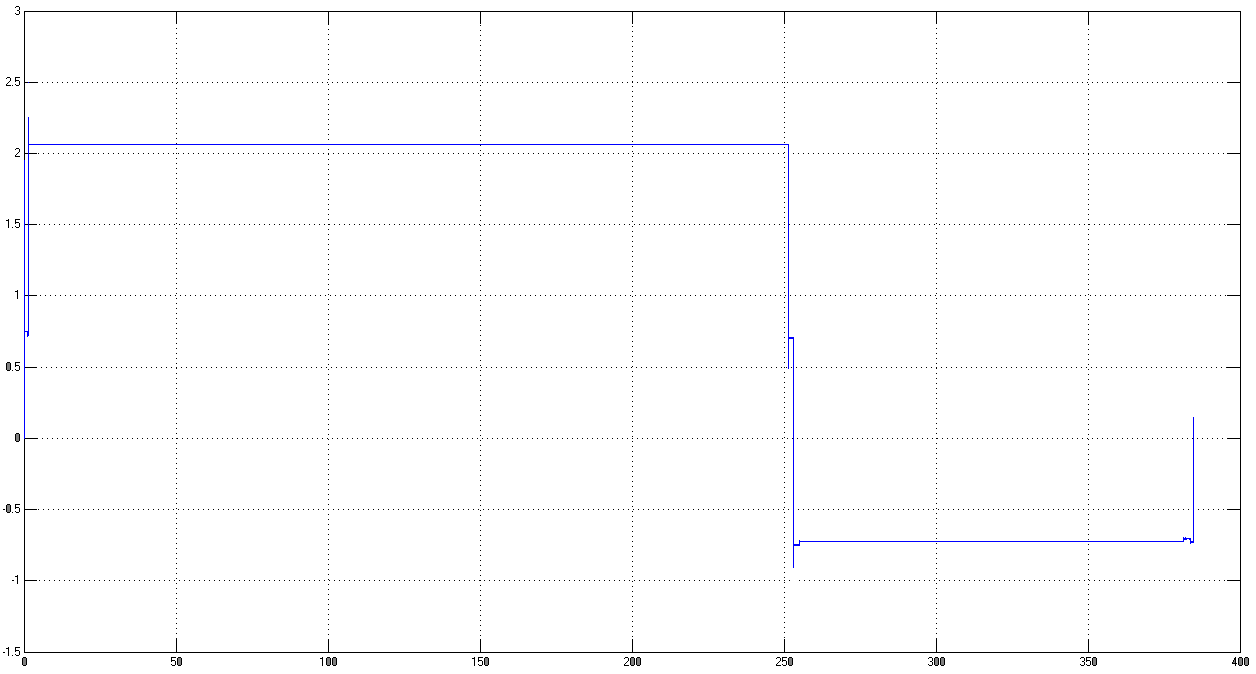 Выводы по результатам проектирования В ходе работы был выполнен расчёт электропривода суппорта токарного станка. Выбраны мотор-редуктор и преобразователь. Построена структурная схема двигателя и системы управления. Система управления была настроена на оптиум по модулю и симметричный оптиум. По результатам моделирования оказалось, что система удовлетворительно отрабатывает входное воздействие и выполняет требования по быстродействию. Список литературы Соколовский Г. Г. Электроприводы переменного тока с частотным регулированием Академия 2004. Конспект лекции Соколовского Г. Г. по ЭП и СУЭП. www.sew-eurodrive.ru | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

