Тау. ТАУ (В 64). Пояснительная записка к курсовому работе (проекту)
 Скачать 0.59 Mb. Скачать 0.59 Mb.
|

|
Министерство науки и высшего образования РФ Федеральное государственное бюджетное образовательное учреждение высшего образования «Волгоградский государственный технический университет» Факультет _________________________________________________________ Кафедра ___________________________________________________________ ПОЯСНИТЕЛЬНАЯ ЗАПИСКАк курсовому работе (проекту) по дисциплине _____________________________________________________ на тему____________________________________________________________ _____________________________________________________________ _____________________________________________________________ _____________________________________________________________ Студент___________________________________________________________ (фамилия, имя, отчество)Группа________________________ Руководитель работы (проекта) ________________________ __________________ (подпись и дата подписания) (инициалы и фамилия) Члены комиссии: _____________________ ____________________________ (подпись и дата подписания) (инициалы и фамилия) _____________________ ____________________________ (подпись и дата подписания) (инициалы и фамилия) _____________________ ____________________________ (подпись и дата подписания) (инициалы и фамилия) Нормоконтролер ______________________________ ___________________________ (подпись, дата подписания) (инициалы и фамилия Волгоград 2022 г. СОДЕРЖАНИЕ Исходные данные………………………………………………………………….3 Введение…………………………………………………………………………...5 1. Функциональная схема САУ…………………………………………………...6 2. Алгоритмическая схема САУ………………………………………………….8 3. Анализ устойчивости исходной САУ………………………………………...11 4. Синтез корректирующих устройств САУ……………………………………13 5 Анализ характеристик скорректированной системы………………………...17 Заключение ………………………………………………………………………19 Список использованных источников ………………..…………………………20 Исходные данные. Требования к САУ Система автоматического регулирования температуры печи Согласно техническим условиям во внутреннем объеме электрической печи 1 требуется поддерживать постоянную температуру. Температура измеряется термопарой 2. Термо-э. д. с термопары сравнивается с напряжением задающего потенциометра 3 и разностный сигнал усиливается электронным усилителем 4, а затем выходным магнитным усилителем 5. Нагревательный элемент 6, питаемый выходным током магнитного усилителя обогревает печь. Уравнения элементов системы имеют следующий вид: Электрическая печь с нагревательным элементом T0d / dt + = k0i ; Магнитный усилитель T1di / dt + i = k1Uу; Электронный усилитель Uу = k2U; Элемент сравнения U = U0 - UT; Термопара T2dUT/ dt + UT = kТ ; где k0 - коэффициент передачи сушильного шкафа; k1 - коэффициент усиления магнитного усилителя; k2 - коэффициент усиления электронного усилителя; kТ - коэффициент передачи термопары; T0 - постоянная времени объекта управления (электрической печи); T1 - постоянная времени магнитного усилителя T2 - постоянная времени термопары Числовые данные:
 Рисунок 1 - Принципиальная схема САУ Введение Система автоматического управления температуры печи очень распространена в современных отраслях производства и широко применяется. Автоматизированные системы управления процессами производства и обработки материалов являются высшим этапом комплексной автоматизации и призваны обеспечить существенное увеличение производительности труда, улучшение качества выпускаемой продукции и других технико-экономических показателей производства, а также защиту окружающей среды. Основными предпосылками для полной автоматизации участков, цехов являются повышение уровня механизации на участках, применение дистанционного управления механизмами, высокий уровень оснащения агрегатов контрольно-измерительными приборами. Печи предназначены для преобразования различных видов энергии (электроэнергии, газа, жидкого и твёрдого топлива, лазерного и СВЧ-излучения и др.) в тепловую и дальнейшей передачи полученного тепла нагреваемым изделиям, реже – для регламентированного отбора тепла от нагреваемого изделия (при ступенчатой и изотермической закалке, изотермическом отжиге изделий и т.п.). Термическая печь представляет собой теплоизолированную камеру определённой формы (прямоугольной, цилиндрической, кольцеобразной и др.), с окном (или окнами) для загрузки и выгрузки изделий, оснащённую: устройствами для трансформации различных источников энергии в тепло; контрольно-измерительными приборами; механизмами для загрузки и выгрузки изделий, транспортировки изделий по камере; другими устройствами в соответствии с функциональным назначением печи. 1 Функциональная схема САУ По приведённой принципиальной схеме и описанию работы системы составим функциональную схему. Характеристика основных функциональных элементов: ЗУ – задающее устройство. Реализуется на принципиальной схеме задающим потенциометром 3. Задает напряжение U0; которое будет сравниваться с термо - ЭДС термопары. СЭ – элемент сравнения, выполненные на упрощенной принципиальной схеме в виде совокупности термопары 2 и задающего потенциометра 3. СЭ определяет сигнал рассогласования между напряжением U0 с задающего устройства и термо - ЭДС. У – усилитель, выполненные па упрощенной принципиальной схеме в виде электронного усилителя 4. Увеличивает величину входного напряжения в k раз. УМ – усилитель мощности, представленный на принципиальной схеме в виде тиристорного преобразователя. Здесь, поступающий на вход тиристорного преобразователя, сигнал Uy усиливается по мощности; РО – регулирующий орган. Реализуется на принципиальной схеме нагревательным элементом и электрической печью; ОУ – объект управления. В качестве него выступает сама печь, температуру которой мы регулируем. ИП – измерительный преобразователь. На принципиальной схеме представлен в виде термопары 2. Заданная САР классифицируется следующим образом: По алгоритму функционирования относится к стабилизирующим системам, так как предназначена для поддержания постоянного значения реryлируемой величины (температуры). По виду энергии используемой в системе, относится к электрическим. По наличию дополнительных источников энергии, относиться к системам непрямого реryлирования, так как в системе есть усилитель. По числу реryлируемых величин система одномерная, по числу контуров регулирования - одноконтурная.  Рисунок 2 - Функциональная схема По виду математического описания - линейная. По виду сигналов, используемых в системе - непрерывная. По характеру ошибки регулирования система статическая так как интегрирующие звенья отсутствуют. 2 Алгоритмическая схема САУ Для составления алгоритмической схемы системы автоматического управления получим передаточные функции каждого функционального элемента схемы.  1) Работа предварительного усилителя описывается следующим дифференциальным уравнением: Uу = k2 U Применим преобразования Лапласа и получим операционную форму записи уравнения, из которой найдем передаточную функцию: Uу (p) = k2 U (p) W1(p) = k2 = 500 В результате получили безынерционное звено. 2) Магнитный усилитель описывается дифференциальным уравнением: T1 di / dt + i = k1 Uу Его передаточная функция будет иметь вид: i(p)( T1p + 1) = k1 Uу(p) W2(p) = i(p) / Uу (p) = k1 / ( T1p + 1) = 35 / (0,2 p +1) В результате было получено инерционное (апериодическое) звено. 3) Электрическая печь с нагревательным элементом описывается дифференциальным уравнением: T0 d / dt + = k0 i Его передаточная функция будет иметь вид: (p)( T0 p+1) = k0 i (p) W3(p) = (p) / i (p) = k0 / ( T0 p+1) = 30 / (55 p +1) Получили инерционное (апериодическое) звено. 4) Термопара описывается дифференциальным уравнением: T2 dUT / dt + UT = kТ Его передаточная функция будет иметь вид: UT (p)( T2 p + 1) = kТ (p) W4(p) = UT (p) / (p) = kТ / ( T2p + 1) = 0,00004 / (0,25 p +1) Инерционное (апериодическое) звено. Составим алгоритмическую схему на основе функциональной и принципиальной схемах 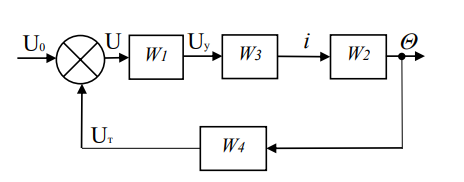 Рисунок 3 – Алгоритмическая схема нескорректированной системы управления температуры печи Найдем передаточную функцию разомкнутой системы:   Найдем передаточную функцию замкнутой системы относительно регулируемой величины по задающему воздействию:    Найдем передаточную функцию замкнутой системы относительно ошибки регулирования по задающему воздействию:   Передаточную функцию замкнутой системы относительно регулируемой величины по возмущающему воздействию и передаточную функцию замкнутой системы относительно ошибки регулирования по возмущающему воздействию не можем найти, т.к. отсутствует возмущающее воздействие. 3 Анализ устойчивости исходной САУ Для того чтобы оценить устойчивость исходной САУ воспользуемся логарифмическим критерием устойчивости: для устойчивости замкнутой системы необходимо и достаточно, чтобы JIАЧХ разомкнутой системы пересекала ось частот раньше, чем ЛФЧХ линию фазового сдвига - π. Устойчивость системы должна обеспечиваться с определенными запасами устойчивости по фазе и амплитуде, чтобы колебания параметров элементов системы не приводили к потере устойчивости. 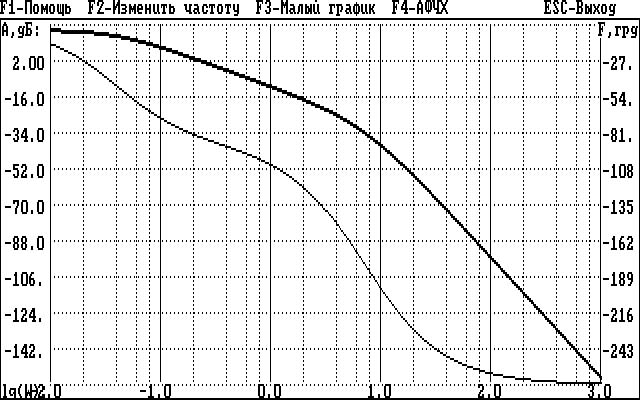 Рисунок 4 - ЛАЧХ и ЛФЧХ исходной САУ На рисунке 4 изображены ЛАЧХ и ЛФЧХ исходной разомкнутой системы с передаточной функцией:  Из графиков видно, что данная разомкнутая система устойчива т.к. ЛАЧХ пересекает ось частот раньше, нежели ЛФЧХ линию фазового сдвига -п. Из переходной характеристики замкнутой нескорректированной системы, 11 изображённой на рисунке 5 также видно, что система устойчива, однако не выполняются условия качества процесса регулирования: величины перерегулирования ( = 30%) и время регулирования (tp = 2 c) не соответствуют заданным значениям. 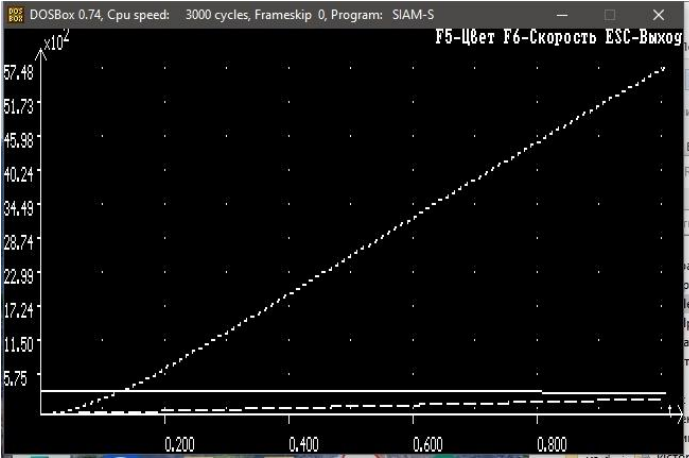 Рисунок 5 - Переходная характеристика исходной САУ Исходная система в разомкнутом состоянии устойчива, так как ЛАЧХ пересекает ось абсцисс раньше, чем ЛФЧХ пересекает линию, соответствующую фазовому сдвигу -π. Система находится в устойчивом состоянии, но не удовлетворяет заданным перерегулированию и времени переходного процесса. 4 Синтез корректирующих устройств САУ Исходя из данных показателей качества переходного процесса, построим «желаемую» ЛАЧХ. Качество процессов регулирования в основном определяется ОСЧ, где находится частота среза, выбирается в зависимости от нужного быстродействия системы (tp) и перерегулирования (σ) ωср = βπ/ tp β зависит от σ и выбирается из справочника по номограммам. Для данной системы σ = 30 %, tp= 2 с; β из справочника берем равным 2,75. Следовательно, ωср = 2,75*3,14/2 = 4,32 (с-1) ωк2 = 2…4ωср = 8,64…17,28 (с-1) принимаем 10 ωк1=ωср2 / ωк = 0,054 (с-1) Через ωср = 4,32 с-1 проводим асимптоту с наклоном –20 дб/дек. От точки с частотой ωк1= 0,054 с-1 продлим асимптоту с тем же наклоном до пересечения с низко-частотной асимптотой неизменяемой ЛАЧХ, т.е. с линией К = 19,1 дБ. Они пересекутся на частоте ωa = 0,76 с-1. На частоте ωк2 = 10 с-1 проводим линию с наклоном –60 дб/дек. Вычитая из желаемой ЛАЧХ исходную ЛАЧХ, получаем ЛАЧХ последовательного корректирующего устройства Lж(ω) – Lн(ω) = Lк(ω) Передаточная характеристика последовательного корректирующего звена имеет вид  где Т0 = 55 с; Та =1/wа = 1/0,76 = 1,31 с; Т2 = 0,25 с; Т1 = 0,2 с; ТК2 = 1/wk2 = 1/10 = 0,1 с.  Реализуем последовательное корректирующее устройство из последовательно соединенных трех активных интегро-дифференцирующих звеньев. Т.к. Эти звенья инвертируют входной сигнал, то, для того чтобы сигнал не изменил фазу, добавим инвертирующий усилитель с коэффициентом усиления равным 1. Определим сопротивление входной цепи и цепи обратной связи.  Рисунок 6 – Схема корректирующего устройств  Коэффициент передачи  Передаточная характеристика первого звена будет  Тогда R2/R1 = 1; R1C1 = 55; R2C2 = 1,31 Примем С2 = 10 мкФ. Тогда R1 = 55/10-5 = 5500 кОм R2 = R1 = 5,5 МОм. С2 = 1,31/5500000 = 0,24.10-6 = 0,24 мкФ. Принимаем С2 = 0,3 мкФ. Аналогично находим величины сопротивлений и емкостей для второго и третьего звеньев:  Тогда R4/R3 = 1; R3C3 = 0,25; R4C4 = 0,1 Примем С2 = 10 мкФ. Тогда R3 = 0,25/10-5 = 25 кОм R3 = R4 = 25 МОм. С2 = 0,1/25000 = 0,24.10-6 = 4 мкФ. Принимаем С4 = 4,3 мкФ.  Тогда R6/R5 = 1; R5C5 = 0,2; R6C6 = 0,1 Примем С2 = 10 мкФ. Тогда R5 = 0,2/10-5 = 20 кОм R5 = R6 = 20 МОм. С2 = 0,1/20000 = 5.10-6 = 5 мкФ. Принимаем С4 = 5,1 мкФ. Окончательная структурная схема выглядит так  Рисунок 7 – Структурная схема САУ 5 Анализ характеристик скорректированной системы Передаточная функция разомкнутой скорректированной системы будет  Фазовую характеристику скорректированной системы определим по формуле  При (М) = - ЛАЧХ имеет запас по модулю LМ = 11 дБ. На частоту среза запас по фазе 61 градус. Построим переходную характеристику спроектированной системы. При воздействии на систему единичной ступенчатой функции выходную величину, являющуюся переходной характеристикой системы h(t), определим используя теорему разложения.  где N(p) – числитель передаточной характеристики замкнутой системы; М(р) - знаменатель передаточной характеристики; М’(р) – первая производная от М(р); pi – корни уравнения М(р) = 0. В нашем случае N(p) = 21  Корни уравнения М(0) = 0 р1 = -5; р2 = -4; р3 = -0.02  Рисунок 8 – Переходная характеристика скорректированной САУ  Рисунок 9 – ЛАЧХ и ЛФЧХ скорректированной САУ По переходной характеристике определяем, что за время tp = 2 с отклонение выходной величины от установившегося значения 1% и перерегулирование σ = 17%. ЗАКЛЮЧЕНИЕ В результате проделанной работы над приведенной сначала системой мы привели её к устойчивому виду с заданными запасами устойчивости. Как видно из графика переходной характеристики скорректированной системы, получившееся время переходного процесса приблизительно как заданное. Такой же вывод можно сделать и относительно перерегулирования. Для стабилизации и демпфирования данной системы использовался метод построения желаемой ЛАЧХ. По её виду определялась передаточная функция дополнительного к системе корректирующего звена. Следовательно для корректировки системы достаточно подсоединить последовательно два интегро-дифференцирующих корректирующих звена. Это сравнительно удобно, т.к. любое интегро-дифференцирующее звено можно реализовать с помощью обычного четырехполюсника. Список литературы 1. Власов, К.П. Теория автоматического управления. Основные положения. Программы расчета / К.П. Власов. -М.: Гуманитарный Центр, 2013. - 544 c. 2. Гайдук, А. Р. Теория и методы аналитического синтеза систем автоматического управления (полиномиальный подход) / А. Р. Гайдук. - М.: Физматлит, 2012. - 360 c. 3. Гайдук, А. Р. Теория автоматического управления в примерах и задачах с решениями в MATLAB. 2-е изд., испр / А.Р. Гайдук, В.Е. Беляев и др.. - СПб.: Лань, 2011. - 464 c. 4 Макаров И.М., Менский Б.М. Линейные автоматические системы. 2-е изд. перераб. и доп.– М.: Машиностроение, 1982. –504 с. 5. Максфилд, Б. Mathcad в инженерных расчетах [Текст] / Б. Максфилд; пер. с англ. Н. Ю. Устьян. - СПб. : КОРОНА-ВЕК, 2010. - 365, [1] с. 6. Теория автоматического управления. Задачи и решения [Электронный ресурс]: учеб. пособие / Л. Д. Певзнер. - Санкт-Петербург : Лань, 2016. - 604 с. |