Шпоры мехатроника. Предпосылки развития мехатроники
 Скачать 208.36 Kb. Скачать 208.36 Kb.
|

Стремительное развитие мехатроники в 90-х годах прошлого столетия как нового научно-технического направления обусловлено тремя основными факторами:
Можно выделить следующие тенденции, изменения и ключевые требования мирового рынка в рассматриваемой области:
Мехатроника – это новая область науки и техники, посвященная созданию и эксплуатации машин и систем с компьютерным управлением движением, которая базируется на знаниях в области механики, электроники и микропроцессорной техники, информатики и компьютерного управления движением машин и агрегатов. Мехатроника изучает синергетическое объединение узлов точной механики с электронными, электротехническими и компьютерными компонентами с целью проектирования и производства качественно новых модулей, систем, машин и комплексов машин с интеллектуальным управлением их функциональными движениями. Синергия – это совместное действие, направленное на достижение общей цели. При этом составляющие части не просто дополняют друг друга, но объединяются таким образом, что образованная система обладает качественно новыми свойствами. Робототехника – это наука создания технических систем с автоматизацией. Это значит, что робототехника, по сути есть синтез программирования управляющего софта, механики и электроники, так как роботы – всё же пока ещё электронные механизмы.
В состав традиционной машины входят следующие основные компоненты
Таким образом, наличие трех обязательных частей - механической (точнее электромеханической), электронной и компьютерной, связанных энергетическими и информационными потоками, является первичным признаком, отличающим мехатронные системы.
Мехатронное устройство обладает следующими характерными признаками:
Мехатронное устройство может быть либо машиной, либо узлом (функциональный элемент, модуль) машины. Мехатронный узел включает в себя:
Назначением мехатронных модулей является реализация заданного управляемого движения, как правило, по одной управляемой координате. Мехатронные модули движения являются теми функциональными «кубиками», из которых затем можно компоновать сложные многокоординатные мехатронные системы. Сущность мехатронного подхода к проектированию состоит в объединении в единый приводной модуль составляющих элементов. Применение мехатронного подхода к проектированию модуля движения базируется на определении возможных точек интеграции элементов в структуре привода. Выявив также точки интеграции можно затем на основе технико-экономического и технологического анализа принимать конкретные инженерные решения на проектирование и изготовления модуля движения.
Механические движения для выполнения основных и вспомогательных операций в технологических и энергетических машинах различных отраслей промышленности
Механические движения при преобразовании различных видов движения в механическую
Механические движения двигателей транспортных средств
Механические движения исполнительных органов систем управления технологических установок различного назначения
Однонаправленное движение РО
Разнонаправленное движение РО
Сложное движение (реверсивное комбинированное) когда в одни периоды времени РО совершает все возможные варианты однонаправленного движения в другие, все возможные варианты реверсивного движения
Апериодическое движение когда изменение скоростей при однонаправленном движении и изменению направленного движения при реверсивном движении. Периодические движение когда в однонаправленном и реверсивном движении можно выделить периоды по определенному закону. Такому циклическому движению характерно перемещение рабочего органа за цикл, за определенное время.
25. Особенности постановки задач управления мехатронными системами. Объектом управления в мехатронике является сложная многосвязная система, в состав которой входят:
Указанная структура объекта управления определяет требования и постановку задачи управления мехатронными системами рассматриваемого класса. Очевидно, что воспроизведение заданных движений мехатронными модулями основывается на выполнении классических требований теории управления: устойчивости, точности и качества процесса управления. Однако дополнительно необходимо учитывать следующие специфические особенности мехатронных систем:
26. Решение обратной задачи кинематики манипулятора на основе обратной матрицы Якоби Для планирования заданного движения мехатронной системы необходимо решить обратную задачу о положении механизма. Суть данной задачи состоит в определении требуемых перемещений звеньев системы по заданному закону движения рабочего органа. Как известно, положение схвата манипулятора однозначно определяется его обобщенными координатами, а именно:
где:  – вектор абсолютных координат схвата; – вектор абсолютных координат схвата; – вектор обобщенных координат манипулятора; – вектор обобщенных координат манипулятора; – число степеней подвижности манипулятора. – число степеней подвижности манипулятора.Дифференцируя (8.6) по времени, получим
где  – матрица Якоби размерностью – матрица Якоби размерностью  для преобразования (8.7). для преобразования (8.7).В терминах рассматриваемой нами обратной задачи кинематики манипуляционных систем матрица Якоби (размерностью  ) имеет вид: ) имеет вид: Зависимость (8.7) более подробно можно представить следующим образом:
Зависимости (8.7) и (8.8) показывают, что между абсолютными скоростями  и обобщенными скоростями и обобщенными скоростями  существует линейная связь, однако коэффициенты в этой линейной связи переменные, так как элементы матрицы Якоби существует линейная связь, однако коэффициенты в этой линейной связи переменные, так как элементы матрицы Якоби  , которые образуют эти коэффициенты в различных сочетаниях, есть величины переменные. , которые образуют эти коэффициенты в различных сочетаниях, есть величины переменные.Выражение (8.7) представляет собой прямую скоростную задачу и её решение при известных (заданных) функциях  не представляет собой принципиальных трудностей. не представляет собой принципиальных трудностей.Решим зависимость (8.7) относительно обобщенных скоростей , а именно:
Эта зависимость и есть решение обратной задачи по скорости, которая часто используется для управления манипуляционным роботом в режиме on-line. При этом вектор обобщенных координат Q является неизвестным и значения  приходится для данного момента времени (рассчитываемого момента реального времени) брать с датчиков обратной связи, фиксирующих текущее положение i-го звена относительно (i-1)-го, то есть значение приходится для данного момента времени (рассчитываемого момента реального времени) брать с датчиков обратной связи, фиксирующих текущее положение i-го звена относительно (i-1)-го, то есть значение  . .В выражении (8.9)  есть обратная матрица по отношению к матрице Якоби есть обратная матрица по отношению к матрице Якоби  . .Рассмотрим более подробно последовательность решения прямой и обратной скоростных задач на примере простого манипулятора с двумя степенями подвижности (рис. 8.9). 27. Принципы построения систем интеллектуального управления в мехатронике К основным признакам систем интеллектуального управления рассматриваемого класса применительно к задачам мехатроники следует отнести:
28. Иерархия управления в мехатронных системах Интеллектуальный уровень – высший уровень управления в системе. Назначение этого уровня – принятие решений о движении механической системы в условиях неполной информации о внешней среде и объектах работ. Например, рассмотрим ситуацию, когда мобильный робот при движении в трубопроводе получает информацию от системы технического зрения о наличии препятствия. Возможные следующие постановки задачи движения:
Функции интеллектуального уровня в современных мехатронных системах обычно выполняет человек – оператор либо мощный компьютер верхнего уровня управления. Стратегический уровень управления предназначен для планирования движений мехатронной системы. Планирование движений предполагает разбиение задачи движения, поставленной интеллектуальным уровнем, на последовательность согласованных во времени элементарных действий и формализацию целей управления для каждого из этих действий. Примерами элементарных действий мобильного робота может служить:
Тактический уровень выполняет преобразование команд управления движением, поступающих со стратегического уровня управления, в программу управления, которая определяет законы согласованного движения во времени всех звеньев механического устройства с учетом технических характеристик блока приводов (в первую очередь ограничений на обобщенные скорости, ускорения и силы). На тактическом уровне необходимо определить обобщенные координаты манипулятора, которые соответствуют желаемым декартовым координатам характеристической точки схвата. Для этого должна быть решена обратная задача о положении манипулятора. Исполнительный уровень управления предназначен для расчета и выдачи управляющих сигналов на блок приводов мехатронной системы в соответствии с программой управления с учетом технических характеристик силовых преобразователей. Для иерархических систем управления в мехатронике действует принцип, согласно которому по мере продвижения от высших к низшим уровням управления понижается интеллектуальность системы, но повышается ее точность. При этом под «интеллектуальностью» понимается способность системы приобретать специальные знания, позволяющие уточнить поставленную задачу и определить пути ее решения, а под «неточностью» – неопределенность в операциях по решению данной задачи. 32. Адаптивное регулирование по эталонной модели Эталонная модель показывает идеальную желаемую реакцию системы на задающий сигнал g(t). В качестве эталонной модели применяют типовые звенья систем автоматического управления (например, апериодическое звено). Параметры ПИД-регулятора настраиваются так, чтобы минимизировать рассогласование между выходом модели и реальной системы. Задача контура настройки состоит в том, чтобы свести это рассогласование к нулю за определенное время с гарантией устойчивости переходного процесса. Данная проблема далеко не тривиальна – можно показать, что она не решается при линейных соотношениях «ошибка – коэффициенты регулятора». Например, в литературе предложен следующий алгоритм настройки параметров:
где k – настраиваемые коэффициенты ПИД-регулятора; А – постоянный коэффициент, задающий скорость адаптации. 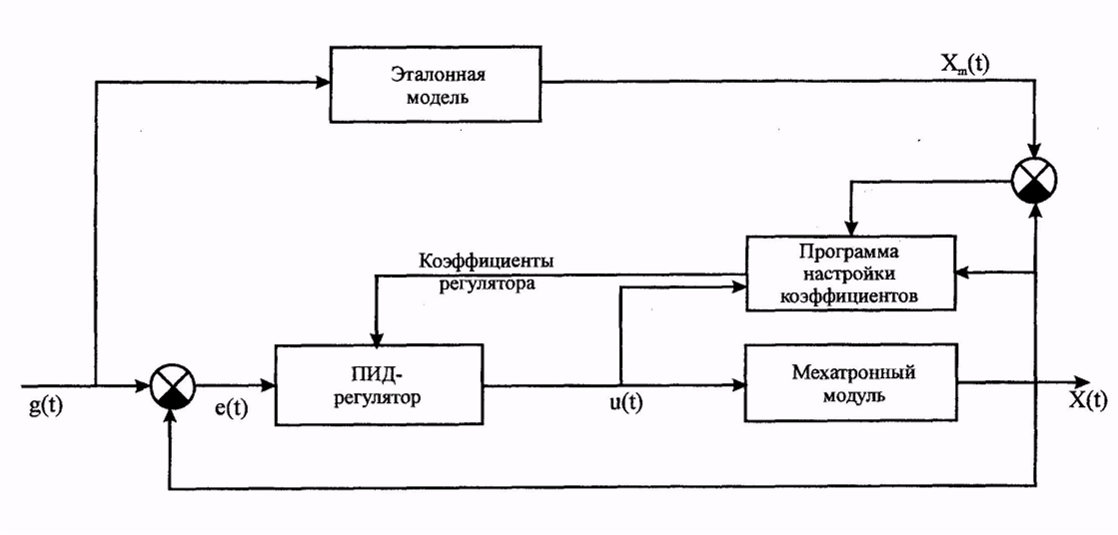 33. Нечёткий регулятор — регулятор, построенный на базе нечеткой логики Для реализации нечеткого регулятора необходимо:
В результате, мы получим возможность определять необходимые нам значения, такие как посещаемость сайта или любое другое необходимое значение, например, мощность котла для обогрева воды, обороты в стиральной машинке и т. д. Нечеткий контроллер функционирует на основе экспертной базы знаний и выполняет следующие основные операции:
|
 ,
, ,
,

 ,
,