При последовательном наблюдении Обнаружение прямолинейных траекторий равномерного движения
 Скачать 1.61 Mb. Скачать 1.61 Mb.
|

|
= 50; б – F = 10-6; = 250) Для малых значений угла поведения кривых на рисунке 12а и 13а аналогичны характеристикам прямолинейного движения ВО [58]. При увеличении параметра z(увеличении скорости ВО и, как следствие, удалению от системы целеуказания за один интервал времени наблюдения), т.е. зависимости среднего значения и СКО оценки времени обнаружения траектории цели возрастают с ростом z. Однако при маневрировании возрастание угла (уменьшение радиуса кривизны маневра) может привести к изменению направления движения ВО при увеличении времени наблюдения и уменьшению дальности при небольших углах Рисунок 12 и 13 позволяют оценить влияние характеристик сигнала, принимаемого системой целеуказания, на средние значения и СКО оценок времени обнаружения траектории ВО. Для сигналов, имеющих случайные амплитуды и начальные фазы, при угле маневрирования 250 ( = 00) для Q0 = 60 и z = 0,02 среднее значение и СКО оценки времени обнаружения траектории ВО равны 3,3 и 0,6 соответственно, а для сигнала со случайной начальной фазой – 3,01 и 0,2. Дополнительная информация, как в главе 2.1, об изменении вероятности обнаружения траектории движения ВО на конкретных временных интервалах РЛН (формирования третьей метки) по отношению к вероятности обнаружения на всех временных интервалах, следует из соотношений:   , (29) , (29)– величины которых пропорциональны вероятностям обнаружения траектории ВО на a-отм – b-том интервалах обзора. На рисунках 14, 15 и 16 представлены зависимости изменений отношений вероятностей обнаружения траектории ВО на 2-ром – 3-ем (P23) и 2-ром – 4-том (P24) интервалах обзора от отношения z = VT0 / R0 при вероятности ложной тревоги F = 10-6. Зависимости построены для различных значений углов, образуемых касательной к траектории движения ВО и радиусом-вектором цели относительно точки нахождения РЛС в начальный момент времени наблюдения. Кривые 1 соответствуют θ = 00, кривые 2 – θ = 250, кривые 3 – θ = 500, кривые 4 – θ = 750, Кривые на рисунке 14а, 15а и 16асоответствуют = 50, и на рисунке 14б, 15б и 16б – = 250.  Сигнал со случайными амплитудой и начальной фазой  Сигнал со случайной начальной фазой а  Сигнал со случайными амплитудой и начальной фазой  Сигнал со случайной начальной фазой б Рисунок 14. Зависимости изменений отношений Pab от параметра z (а –F= 10-6; = 50; б – F = 10-6; = 250) На рисунке 14 сплошными линиями изображены зависимости вероятностей обнаружения траекторий движения ВО P24 при наблюдении на втором – четвертом интервалах времени обзора. Пунктирными линиями показаны зависимости P23 при наблюдении ВО на втором – третьем интервалах времени обзора. Как и ранее, для малых углов маневрирования, вероятность обнаружения траектории ВО на интервалах наблюдения аналогична результатам, полученным при прямолинейно движущихся ВО [56-58]. Однако характеристики принимаемого от цели сигнала влияют на эту вероятность различным образом (рисунок 14). Вероятность обнаружения траектории при использовании в системе целеуказания сигнала со случайными значениями амплитуды и начальной фазы изменяется от 0,86...0,93 до 0,95...0,983, а для сигнала со случайной начальной фазой – от 0,87 до 0,99. Зависимости вероятностей, заданные на интервалах наблюдения, от отношений сигнал-шум и вероятности ложной тревоги аналогичны зависимостям при прямолинейном движении ВО [58]. Возрастание отношений сигнал-шум и вероятности ложной тревоги приводит к возрастанию P23 и P24. Увеличение кривизны траектории движения ВО приводит к более быстрому убыванию вероятности обнаружения траектории маневрирования на заданных интервалах радиолокационного наблюдения (рисунок 14б). При z = 0,04, согласно зависимости 3 ( = 500) с ростом вероятность P23 уменьшится для сигнала со случайными значениями амплитуды и начальной фазы на 0,02, а для сигнала со случайной начальной фазой – на 0,04. Существенное влияние на вероятность обнаружения траектории ВО оказывает интервал времени наблюдения. На рисунке 14б увеличение На рисунках 15 и 16показаны зависимости P23 и P24 при наблюдении ВО на втором – третьем и втором – четвертом интервалах обзора. Сплошными линиями представлены зависимости вероятностей обнаружения траекторий движения ВО при отношении сигнал-шум в начальный момент времени Q0 = 60, а пунктирными линиями– при Q0 = 40.  Сигнал со случайными амплитудой и начальной фазой  Сигнал со случайной начальной фазой а  Сигнал со случайными амплитудой и начальной фазой  Сигнал со случайной начальной фазой б Рисунок 15. Зависимости изменений отношений P24 от параметра z (а –F= 10-6; = 50; б – F = 10-6; = 250)  Сигнал со случайными амплитудой и начальной фазой  Сигнал со случайной начальной фазой а 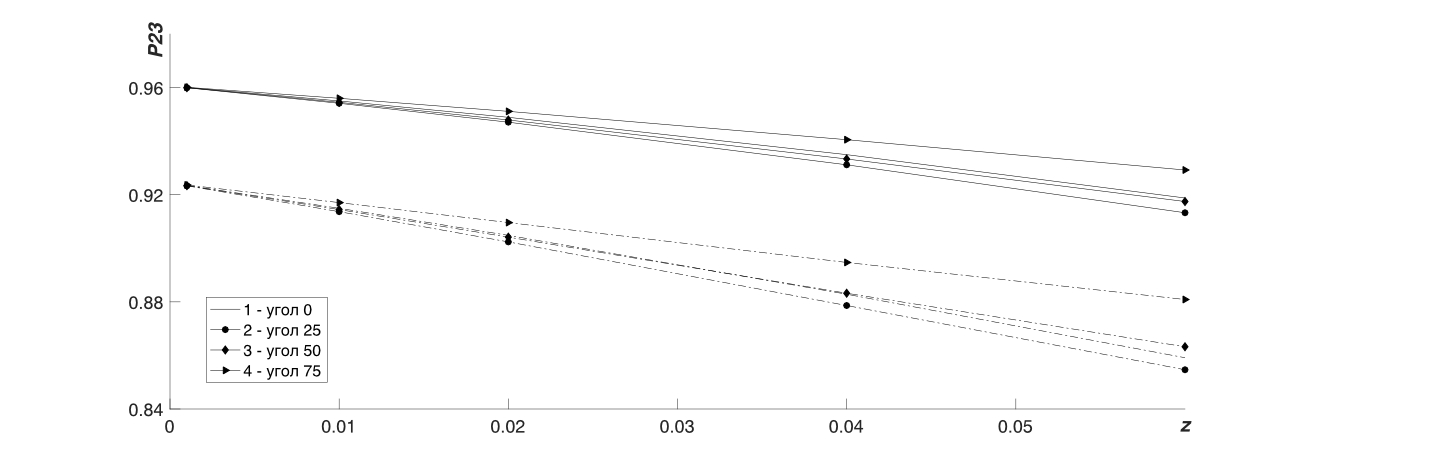 Сигнал со случайными амплитудой и начальной фазой  Сигнал со случайной начальной фазой б Рисунок 16. Зависимости изменений отношений P24 от параметра z (а –F= 10-6; = 50; б – F = 10-6; = 250) Из рисунков 15 и 16 следует, что увеличение Q0 с 40 до 60 приводит к возрастанию Отметим, что при малых интервалах времени наблюдения существенное влияние на величину вероятности обнаружения траектории движения ВО оказывают отношение сигнал-шум в начальный момент наблюдения, зависящие от дальности цели, и вероятности ложной тревоги. Как следует из рисунков 15а и 16а,вероятность P23, соответствующая второму – третьему интервалам наблюдения, при изменении Q0 от 40 до 60 увеличивается: - при использовании сигнала со случайными значениями амплитуды и начальной фазы увеличивается на 0,06; - при использовании ля сигнала со случайной начальной фазой –на 0,02..0,22. При этом изменение P24 не превышает 0,02 и 0,005 соответственно. Выводы 1. С использованием принципов вторичной обработки радиолокационной информации построен алгоритм обнаружения прямолинейных траекторий равномерного движения ВО. Получены аналитические соотношения для вероятностей обнаружения прямолинейно движущейся радиолокационной цели при последовательных наблюдениях и вероятности обнаружения траектории движения на интервалах времени обзора. Выявлено уменьшение указанных вероятностей при изменении отношения расстояния, проходимого целью за интервал обзора, к дальности цели в начальный момент ее наблюдения, отношения сигнал-шум в начальный момент наблюдения и интервала времени наблюдения. Показана целесообразность учета изменения вероятностей обнаружения прямолинейно движущихся целей при их последовательных радиолокационных наблюдениях и обнаружении их траекторий движений. 2. Выполнен синтез алгоритма обнаружения траекторий движения маневрирующих ВО. Получены аналитические выражения для характеристик обнаружения траекторий ВО, движущихся по окружности, с учетом изменения вероятностей их обнаружения в последовательных радиолокационных наблюдениях. Установлено влияние на характеристики обнаружения траекторий маневрирующих ВО скорости их движения, параметров информационных сигналов РЛС и отношения сигнал-шум на выходе приемника в начальный момент наблюдения, а также изменения углов маневрирования. Доказана необходимость учета изменения вероятностей обнаружения маневрирующих целей при радиолокационных наблюдениях для расчета характеристик обнаружения их траекторий. |