Применение биомеханики в робототехнике Автор проекта Белявская Арина Георгиевна
 Скачать 1.81 Mb. Скачать 1.81 Mb.
|

|
Государственное бюджетное общеобразовательное учреждение средняя общеобразовательная школа №422 Кронштадтского района Санкт-Петербурга Применение биомеханики в робототехнике Автор проекта: Белявская Арина Георгиевна, ученица 9 класса «М». Руководитель проекта: Ненахова Ирина Викторовна, учитель технологии. 2020 год СОДЕРЖАНИЕ
ВВЕДЕНИЕ В последние годы одновременно с информатизацией общества лавинообразно расширяется применение микропроцессоров в качестве ключевых компонентов автономных устройств, взаимодействующих с окружающим миром без участия человека. Стремительно растущие коммуникационные возможности таких устройств, равно как и расширение информационных систем, позволяют говорить об изменении среды обитания человека. Авторитетными группами международных экспертов область взаимосвязанных роботизированных систем признана приоритетной, несущей потенциал революционного технологического прорыва. В связи с активным внедрением новых технологий в жизнь общества, появляется возможность применять биомеханические изобретения в качестве детских игрушек, домашних питомцев, также для военной разведки и в определенных областях медицины. В наше время обсуждаются бионические возможности использования локомоционных (двигательных) принципов статики, кинематики и динамики в задачах современной робототехники и нелинейной динамики. В частности, при разработке захватных устройств манипуляторов целесообразно использовать те принципы оптимизации процесса удержания объекта в схватке, которые характерны для лапок птиц и пресмыкающихся. Ещё более важное значение для робототехники и нелинейной динамики машин имеют биодинамические принципы беговой локомоции человека и крупных хищников, в которых отчётливо проявляется взаимосвязь линейных режимов колебаний конечностей при спокойной ходьбе и нелинейных режимов при переходе к бегу и прыжкам. Цель: изучить принципы построения роботов на основе платы ArduinoUno. Создать действующую модель робокошки и разработать алгоритм его поведения. Задачи: Изучить особенности построения роботов на базе плат Arduino и их модулей. Изучить особенности среды программирования роботов на базе платформы Arduino. Создать 3d модель робокошки Распечатать детали на 3d принтере Разработать алгоритм движения робота на базе анализа входной информации. Запрограммировать робокошку. ОСНОВНАЯ ЧАСТЬ Биомеханика и бионика Биомеханика — раздел естественных наук, изучающий на основе моделей и методов механики механические свойства живых тканей, отдельных органов, или организма в целом, а также происходящие в них механические явления. Биомеханика как одна из биологических наук нового типа сближается по методам исследования с точными науками. Общая биомеханика как раздел биофизики возникла на стыке физико-метематических и биологических областей знания. Успехи этих наук, использование идей и подходов кибернетики сказывается на развитии биомеханики. Но и эти науки обогащаются данными биомеханики о физике живого. То есть тут налицо двусторонняя связь. Кроме того, биомеханика обслуживает такие отрасли знания или области действия как разработка роботов (бионика), инженерная биомеханика, медицинская биомеханика дает обоснование методам протезирования, ортопедии, ЛФК. Бионика — прикладная наука о применении в технических устройствах и системах принципов организации, свойств, функций и структур живой природы, то есть формах живого в природе и их промышленных аналогах. Различают: биологическую бионику, изучающую процессы, происходящие в биологических системах. Бионика – стержень робототехники. Если роботы первою поколения, похожие на бесчувственные часовые механизмы, известны человечеству с давних времён, то роботы второго и третьего поколений смогли появиться лишь в XX веке, вслед за выдающимися достижениями современной науки и техники. Своим существованием они обязаны бионике и кибернетике. Эти науки создали научный фундамент для построения мыслящих машин высших поколений. Необходимость приспособления (адаптации) роботов к изменяющимся условиям внешней среды потребовала разработки для них органов чувств, аналогичных человеческим: слуха, зрения, осязания. Здесь конструкторы вынуждены были обратиться за консультацией к природе, создавшей у живых существ самые разнообразные органы чувств. Цель бионики (так называется эта сравнительно новая наука) – перенесение в технику принципов действия систем, управляющих живыми организмами. Робототехника Бионические роботы - роботы, созданные на основе идей, подсмотренных в природе, либо внешне напоминающие живые существа (зооморфные роботы) За время развития жизни на Земле в процессе естественного отбора природа создала массу замечательных образцов живых «инженерных систем». Многие изобретения природы заимствовались людьми для создания конструкций ещё в древности. Так, древние арабские врачи, изучая глаз человека, создали линзы – подобие хрусталика глаза. Великий русский учёный Н. Е. Жуковский, исследовав полет птиц, разработал теорию подъёмной силы крыла и современную аэродинамику. Робототехника — отдел прикладной науки, который занимается проектированием, производством и применением автоматизированных технических систем — роботов. Робот — это программируемое механическое устройство, способное действовать без помощи человека. Роботы бывают манипуляционными и мобильными. За исполнение действий манипуляционного робота отвечает манипулятор с несколькими степенями подвижности и устройство программного обеспечения. Манипуляционные роботы получили большое распространение в машиностроительных и приборостроительных отраслях. Мобильный робот более подвижен, чем манипуляционный, поскольку у него есть движущееся шасси с автоматически управляемыми приводами — «мышцами» роботов. Роботы могут перемещаться по любой поверхности, в воде и в воздухе. Так, по типу передвижения роботы бывают: Колесными и гусеничными (наиболее распространенный вид роботов); Шагающими; Летающими — автопилоты и беспилотные летательные аппараты; Ползающими — передвигаются по принципу змей и червей, применяются для поиска людей под обломками рухнувших зданий; Плавающие — перемещаются в воде, подражая движениям рыб, и тем самым становятся бесшумными и очень маневренными; Роботы, передвигающиеся по вертикальным поверхностям — действуют по принципу человека, взбираясь на стену с помощью выступов, или же с помощью специальных присосок. Робот — автоматическое устройство, предназначенное для осуществления различного рода механических операций, которое действует по заранее заложенной программе. Робот обычно получает информацию о состоянии окружающего пространства посредством датчиков (технических аналогов органов чувств живых организмов). Робот может самостоятельно осуществлять производственные и иные операции, частично или полностью заменяя труд человека. При этом робот может как иметь связь с оператором, получая от него команды (ручное управление), так и действовать автономно, в соответствии с заложенной программой (автоматическое управление). Назначения роботов могут быть самыми разнообразными, от увеселительных и прикладных и до сугубо производственных. Внешний вид роботов разнообразен по форме и содержанию, может быть каким угодно, хотя нередко в конструкциях узлов заимствуют элементы анатомии различных живых существ, подходящие для выполняемой задачи. Плата Arduino Arduino — это электронный конструктор и удобная платформа быстрой разработки электронных устройств для новичков и профессионалов. Платформа пользуется огромной популярностью во всем мире благодаря удобству и простоте языка программирования, а также открытой архитектуре и программному коду. Устройство программируется через USB без использования программаторов. Arduino позволяет компьютеру выйти за рамки виртуального мира в физический и взаимодействовать с ним. Устройства на базе Arduino могут получать информацию об окружающей среде посредством различных датчиков, а также могут управлять различными исполнительными устройствами. Микроконтроллер на плате программируется при помощи языка Arduino и среды разработки Arduino (основана на среде Processing). Проекты устройств, основанные на Arduino, могут работать самостоятельно, либо же взаимодействовать с программным обеспечением на платы могут быть собраны пользователем самостоятельно или куплены в сборе. Построение роботов с использованием любой технологии подразумевает изучение принципов работы специальных микросхем, которые называются микроконтроллерами. Они предназначены для управления электронными устройствами и представляют собой однокристальный компьютер, способный выполнять простые задачи. Контроллер, являясь «уменьшенной копией» компьютера, содержит все присущие ему основные модули: центральный процессор, оперативную память, flash-память, внешние устройства.  Структура микроконтроллера. Для построения роботов используются различные платформы. В рамках проводимого исследования для разработки робота-гонщика была выбрана платформа Arduino. Первый прототип Arduino был разработан в 2005 году программистом Массимо Банци. На сегодняшний день платформа Arduino представлена не одной платой, а целым их семейством. Такой подход позволяет собирать всевозможные электронные устройства, работающие работать как автономно, так и в связке с компьютером. Платы Arduino представляют собой наборы, состоящие из готового электронного блока и программного обеспечения. Электронный блок — это печатная плата с установленным микроконтроллером. Фактически электронный блок Arduino является аналогом материнской платы компьютера. На нем имеются разъемы для подключения внешних устройств, а также разъем для связи с компьютером, по которому осуществляется программирование. Самой популярной и наиболее универсальной платформой семейства является плата ArduinoUno. Она выполнена на базе процессора с тактовой частотой 16 МГц, обладает памятью 32кБ, два из которых выделено под загрузчик, позволяющий прошивать Arduino с обычного компьютера через USB. Также имеется 2 кБ SRAM-памяти, которые используются для хранения временных данных (это оперативная память платформы) и 1кБ EEPROM-памяти для долговременного хранения данных (аналог жёсткого диска). На платформе расположены 14 контактов, которые могут быть использованы для цифрового ввода и вывода. Какую роль исполняет каждый контакт, зависит от программы. Некоторые контакты обладают дополнительными ролями. Например, Serial 0-й и 1-й — используются для приёма и передачи данных по USB; LED 13-й — к этому контакту подключен встроенный в плату светодиод. Также имеется 6 контактов аналогового ввода и входной контакт Reset для сброса.   САПР Компас-3D САПР «КОМПАС-3D» Система автоматизированного проектирования — автоматизированная система, реализующая информационную технологию выполнения функций проектирования, представляет собой организационно-техническую систему, предназначенную для автоматизации процесса проектирования, состоящую из персонала и комплекса технических, программных и других средств автоматизации его деятельности. Также для обозначения подобных систем широко используется аббревиатура САПР. Программное обеспечение САПР для механического проектирования использует векторную графику в целях изображения объектов традиционного черчения или может также создавать растровую графику, отображающую общий вид проектируемых объектов. Тем не менее, это включает в себя больше, чем просто шаблонные формы. Как и при ручном создании технических и инженерных чертежей, выходные данные САПР должны передавать информацию, такую как характеристики используемых материалов, процессы, размеры и допуски, в соответствии с соглашениями для конкретных приложений. «Компас» — семейство систем автоматизированного проектирования с возможностями оформления проектной и конструкторской документации согласно стандартам серии ЕСКД и СПДС. КОМПАС-3D — мощная и универсальная система трёхмерного проектирования, ставшая стандартом для тысяч предприятий, благодаря простоте освоения и широким возможностям твердотельного, поверхностного и прямого моделирования. Ключевой особенностью продукта является обеспечение сквозного процесса проектирования от реализации идеи в 3D до подготовки полного комплекта документации. В основе КОМПАС-3D лежат собственное математическое ядро и параметрические технологии, разработанные специалистами АСКОН. Продукт содержит инструменты для коллективного проектирования изделий и объектов строительного проектирования любой степени сложности и позволяет подготовить полноценную электронную модель изделия, здания и сооружения. Базовая функциональность продукта легко расширяется за счёт различных приложений, дополняющих функционал КОМПАС-3D эффективным инструментарием для решения прикладных инженерных задач. Например, приложения для проектирования трубопроводов, металлоконструкций, различных деталей машин позволяют большую часть действий выполнять автоматически, сокращая общее время разработки проекта в несколько раз. КОМПАС-3D включает в себя: инструменты для коллективной работы, в том числе над проектами, содержащими несколько десятков тысяч уникальных компонентов и стандартных изделий; развитый функционал трехмерного твердотельного, поверхностного и прямого моделирования; инструменты для работы с исполнениями и конфигурациями (в том числе зеркальными) деталей и сборочных единиц; инструменты моделирования деталей из листового материала с последующим автоматическим получением чертежа развертки; специальные возможности, облегчающие построение литейных форм: литейные уклоны, линии разъема, полости по форме детали (в том числе с заданием усадки); инструменты создания пользовательских библиотек типовых элементов; возможность получения технической документации в соответствии с ГОСТ, ISO, DIN или стандартами предприятия: чертежи, простые и групповые спецификации, отчеты, схемы, таблицы, текстовые документы; средства для передачи данных в различные CAD/CAM/CAE-системы; возможность быстрого перехода от проектирования к изготовлению деталей с использованием CAM-систем и станков с ЧПУ; возможность простановки размеров, обозначений и технических требований в трехмерных моделях (поддержка стандарта ГОСТ 2.052-2006 «ЕСКД. Электронная модель изделия»). КОМПАС-3D позволяет: обеспечить коллективную работу над проектом; избежать принципиальных ошибок на самых ранних стадиях проектирования; наглядно представить будущее изделие и проверить его собираемость; получить модель объекта и оценить возможные коллизии на этапе проектирования; произвести необходимые расчеты и оптимизацию конструкции без дорогостоящих натурных испытаний; изменять и модифицировать проект в кратчайшие сроки; в связке с CAM-системами существенно сократить время подготовки изделия к производству; быстро подготовить документацию на изделие, объект; используя 3D-модели, готовить эффектные маркетинговые материалы. Современный удобный и интуитивно понятный интерфейс, мощная справочная система и встроенное интерактивное обучающее руководство «Азбука КОМПАС» помогают пользователям освоить работу в системе в кратчайшие сроки и без лишних усилий. Проектирование робокошки. Для создания модели кота-робота нужны детали, из которых и будет состоять основа. Для их создания я изначально воспользовалась САПР Компас-3D, но мне он не очень понравился, и я решила использовать Inventor. 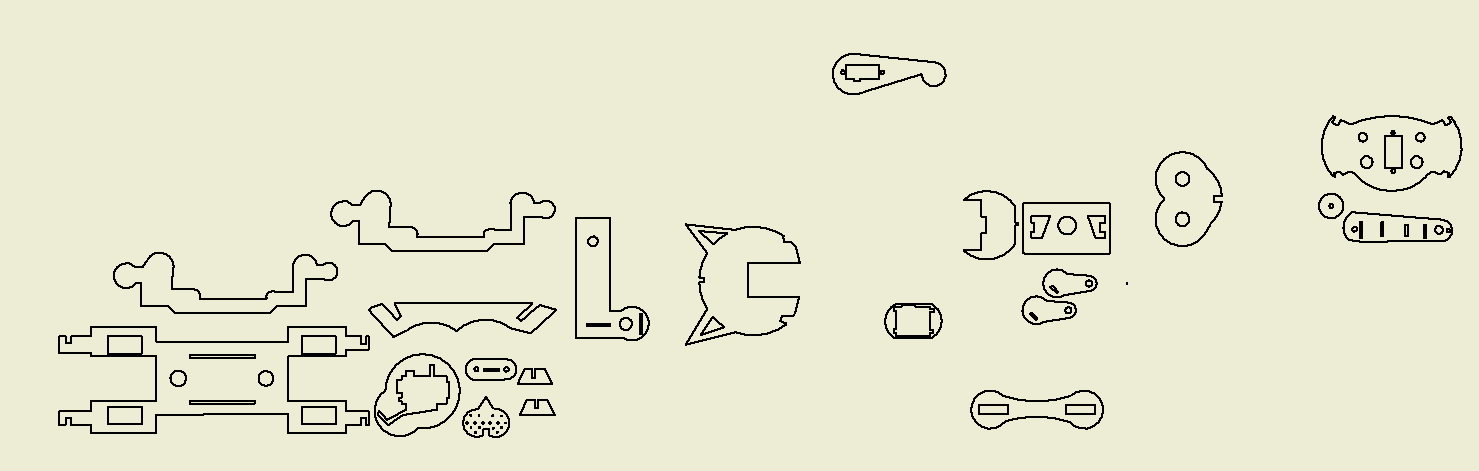 Я спроектировала детали, которые составляют отдельные “части тела” робота: бедро и икроножную часть для лапки; шею, череп, отверстия для глаз и нос для головы; пузико, ребра, таз и плечевой пояс для тела. После создания всех деталей в Компасе я стала распечатывать их с помощью 3D принтера. Теперь все готово для сборки. Сборка Теперь собираем робота на макетной плате для прототипирования и загружаем скетч управления на микроконтроллер. Это очень важный этап перед сборкой. Отключить USB-кабель и подать питание на макет от батарейки «Крона». Проверить все фазы движения и убедиться, что все работает. После сборки робота что-либо менять (например, заменить неработающий серводвигатель) будет уже сложнее. 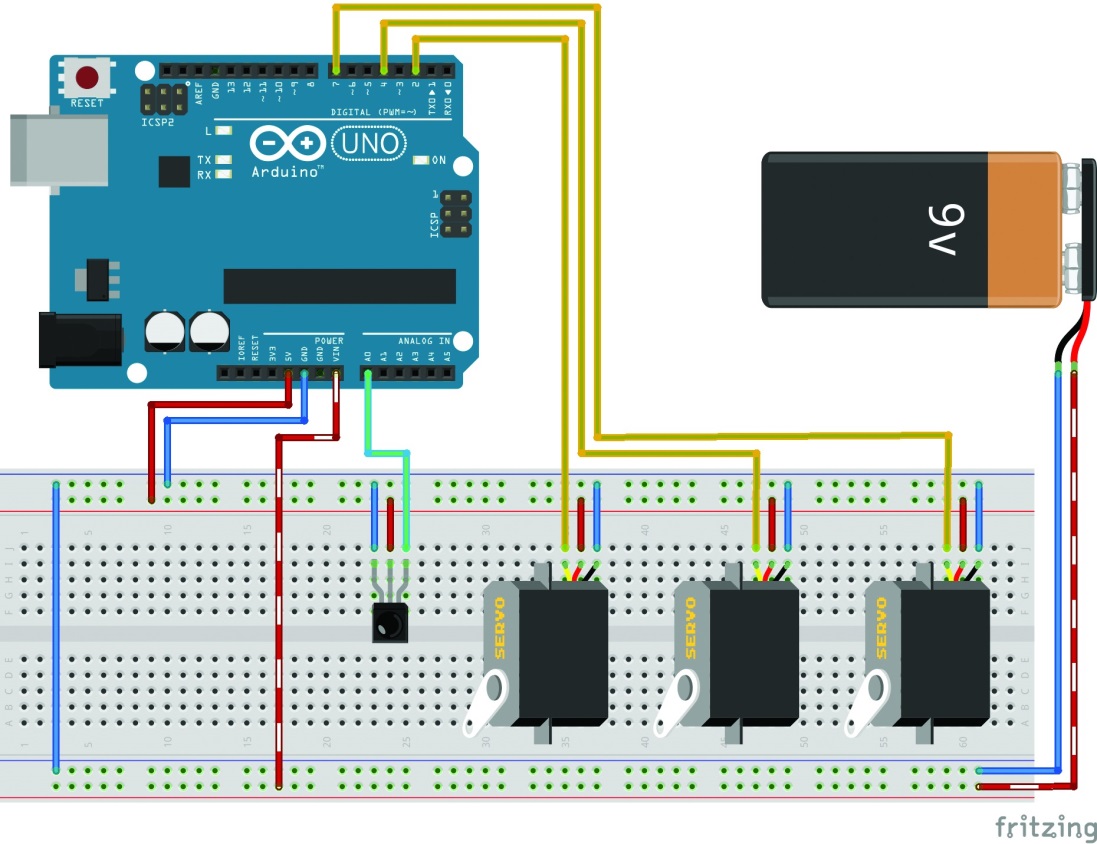 Прототип робота на макетной плате. Теперь перейдем к самой сборке. Основной несущий элемент — это батарейный отсек. Лучше всего использовать отсек закрытого типа и обязательно с выключателем. Закреплять детали робокошки проще всего термоклеем. Начать стоит с серводвигателей. Затем приклеить эту сборку из «серв» к крышке батарейного отсека. Батарейный отсек должен свободно открываться для смены батарейки. Контроллер проще всего приклеить к отсеку, но мне этот вариант не очень нравится, так как придется навсегда отдать Arduino Unо робокошке. Поэтому можно усложнить себе жизнь и использовать разъемы Arduino для крепления батарейного отсека. Провода, идущие от батарейного отсека, надо соединить с выводами Vin и соседним с ним GND. Главное – не перепутать полярность. Плюс «Кроны» на Vin, минус на GND.  Батарейный отсек Провода питания (+5 В — обычно красный и GND — черный или коричневый) надо объединить и вывести к гнездам 5V и соседнему с ним GND на контроллере. Провода управляющего сигнала (обычно желтый) выводим на цифровые выводы контроллера: левый серводвигатель на пин 2, центральный на пин 4, правый на пин 7. «+» и «–» ИК-приемника можно просто вставить в разъем Arduino (5V и соседний GND). Правда, согнув пополам, удвоив их толщину. 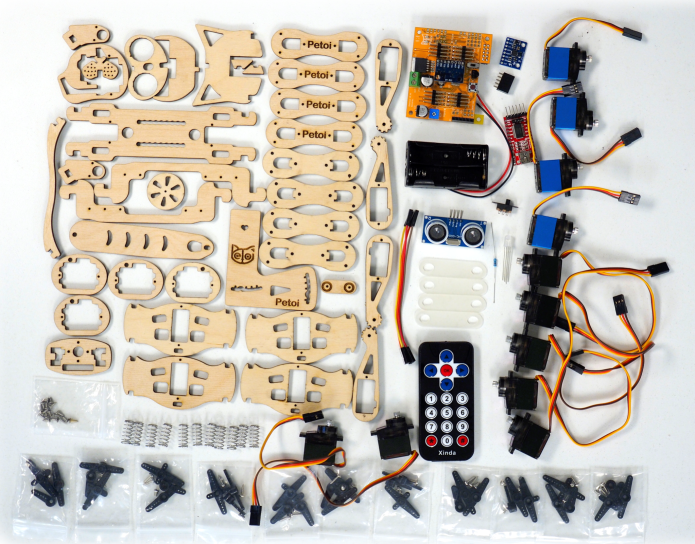 После того, как все детали разработаны и отредактированы необходимо подготовить файлы к печати. Так как 3D-принтер MZ3D-360 может работать только с приложением «Cura», которое требует расширение файла STL, то все свои детали я сохранила в этом расширении. Печатать детали я начала с самых маленьких и простых, постепенно повышая сложность и время их печати. Для того, чтобы начать печать надо в программе «Cura» правильно расположить деталь. Это необходимо для уменьшения затраченного пластика и времени печати. После этого необходимо установить пластик в принтер, подготовить печатный стол к работе, обработав его специальным клеем для печати. Далее требуется запустить печать и периодически проверять, как проходит печать. После окончания печати следует подождать 5 минут, чтобы пластик остыл и можно было снимать деталь со стола. Делать это необходимо специальным инструментом, внешне напоминающим шпатель. Далее можно начинать печатать следующую деталь. Когда все детали напечатаны, можно приступать к сборке. Сборку следует проводить в соответствии со сборкой в САПР, последовательно скрепляя части стойки, подставки 1. 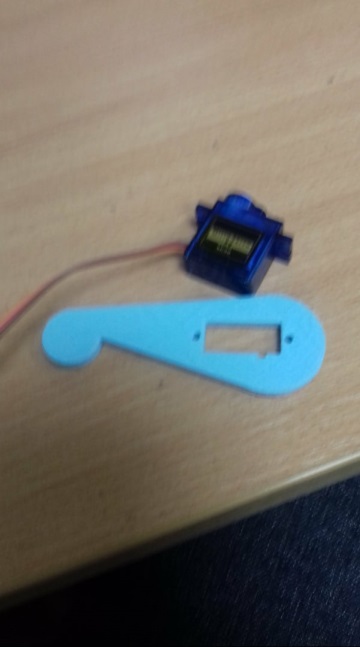    2. 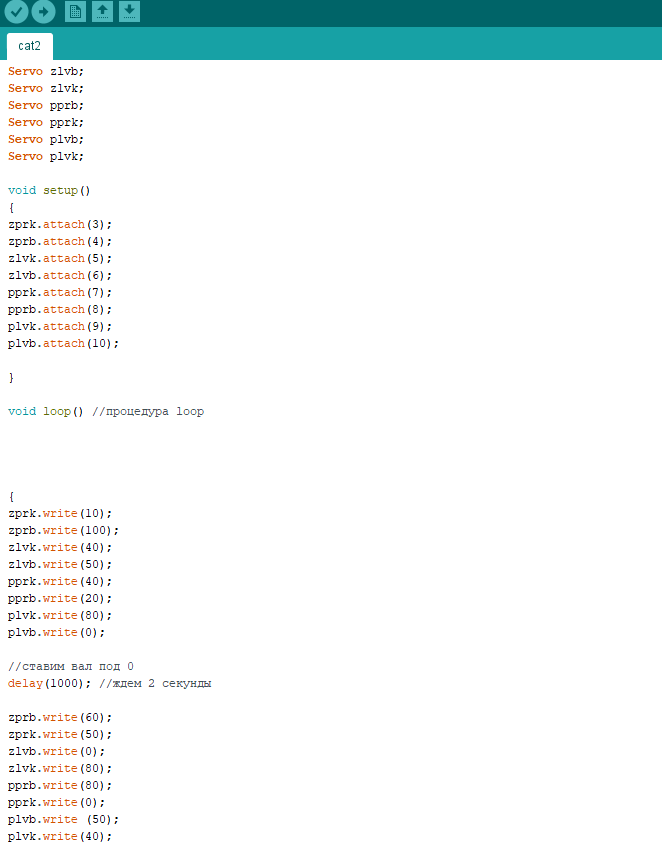 Программа для движения робокошки. 3. 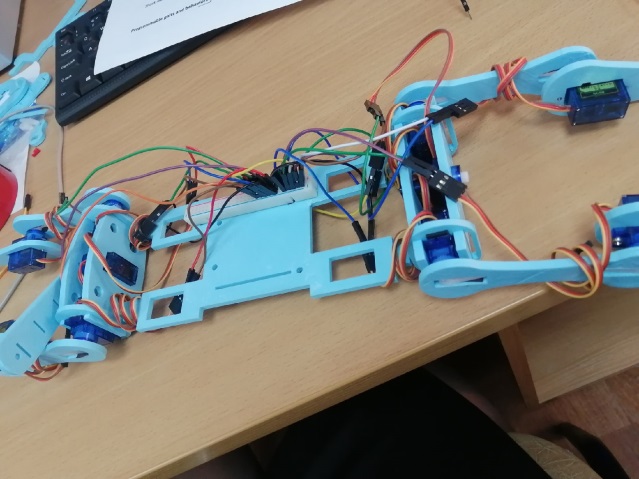 4. 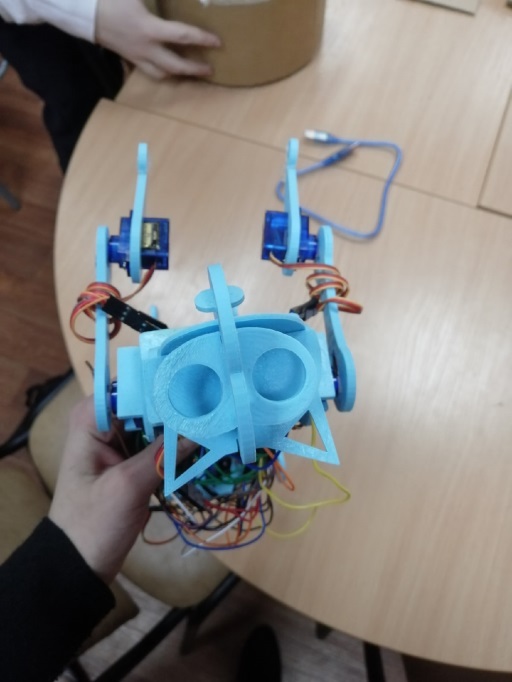 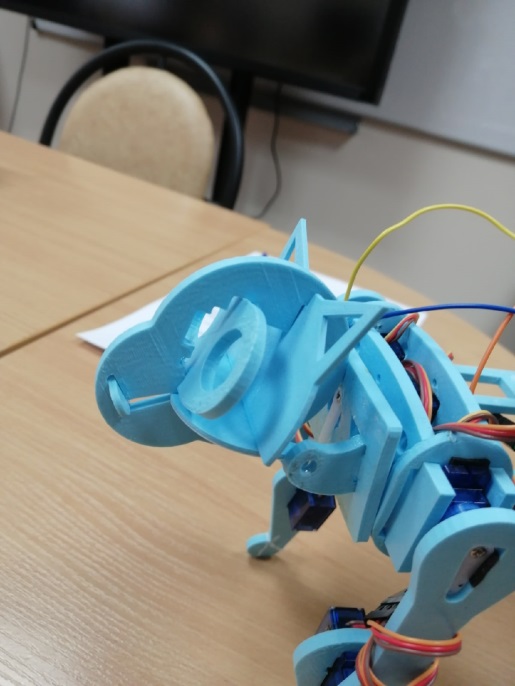 5. Заключение Работая над данным проектом, я узнала об особенностях построения роботов на базе плат Arduino и их модулей, индивидуальность среды программирования роботов на базе платформы Arduino, научилась делать модель робокошки и создавать программу для её движений. В процессе реализации проекта научилась работать в САПР, где были созданы главные компоненты робокошки. Получила уникальную возможность – распечатать компоненты робота на 3D-принтере MZ3D-360. Научилась работать с данным устройством и программой «Cura». Сборка робота из собственноручно сделанных деталей была увлекательным занятием. |