Исследование параметрического стаблизатора напряжения. МД_Использование робототехнического набора Arduino при изучении. Программа Естественнонаучное образование
 Скачать 2.12 Mb. Скачать 2.12 Mb.
|

|
2.3. Образовательная робототехника в учебном процессе по физике как средство обучения, развития и воспитания учащихся Рассмотрим составляющие методики применения образовательной робототехники как средства обучения развития и воспитания учащихся при обучении физике. 1. Обучающие функции РТ. Дидактический потенциал робототехники чрезвычайно высок. Занимаясь робототехникой, школьники приобретают современные п о л и т е х н и ч е с к и е з н а н и я и у м е н и я , у них формируются соответствующие т е х н и ч е с к и е и т е х н о л о г и ч е с к и е к о м п е т е н ц и и , необходимые для жизнедеятельности в насыщенной разнообразными объектами техники социальной среде. Освоение робототехники как одного из направлений политехнической подготовки по предмету обеспечивает з а к р е п л е н и е и у г л у б л е н и е п р е д м е т н ы х з н а н и й , ф о р м и р о в а н и е познавательных и практических у м е н и й . Учащиеся о в л а д е в а ю т у н и в е р с а л ьными учебными действиями . Робототехника – благодатная основа для р е а л и з а ц и и м е ж п р е д м е т н ы х с в я з е й . Это определяется мультидисциплинарностью данной области знания. На занятии по робототехнике важны знания по разным предметам: технологии, физике, информатике, математике, черчению и др. Эти знания необходимы как для понимания принципов функционирования роботов, так и при самостоятельном их проектировании и конструировании учащимися. Как правило, при выполнении большинства проектов имеет место интеграция знаний естественнонаучных дисциплин, математики, информатики и технологии. Возможна, как уже отмечалось, интеграция робототехники с гуманитарными областями знания (реконструкция различных событий истории, исследование поведения взаимодействия социальных групп, решение задач социальной адаптации и т.д.). Наиболее очевидна для учащихся «связка» предметов «технология – информатика». Компьютерная среда моделирования и программирования робота, сборка его натурной модели вызывают у учащихся особый интерес. Значимость для школьников освоения современных компьютерных технологий и их применения в различных областях социальной практики способствуют развитию популярности занятий робототехникой. Создание и конфигурирование интерактивной конструкции робота средствами виртуальной среды стало на сегодня доступно детям и школьникам практически любого возраста. Это мир виртуальной реальности, в котором школьник реализует свои замыслы и оценивает дееспособность созданных роботов, создает дополнительные условия (нередко экстремальные) для их проверки на «прочность». Задача учителей определить и реализовать в проектной деятельности учащихся по робототехнике ее предметную составляющую и показать роль смежных областей научного знания. Виды, методы и приемы реализации межпредметных связей раскрыты в работах Х.Х. Абушкина [3], С.Н.Бабиной [9], В.А. Ишутина [61], В.Е. Медведева [93], О.В. Финагиной [167], А.В. Усовой [156], О.А. Яворука [188] и др. Междисциплинарная направленность проектных заданий в области робототехники способствует с и с т е м а т и з а ц и и и о б о б щ е н и ю з н а н и й по разным предметам, достижению в итоге метапредметных результатов обучения. Робототехника – это новое средство наглядности. Известно ее стимулирующее воздействие на восприятие учащимися учебного материала и эффективное его усвоение. Роботизированные демонстрации учебного физического эксперимента и технических приложений физики не только интересны для школьников. Они позволяют повысить качество учебных демонстраций. Так, например, при постановке роботизированного эксперимента возможно преобразование малых количественных изменений в значимые по проявлению и хорошо наблюдаемые изменения. В ряде случаев малые количественные изменения величин могут быть преобразованы в качественные показатели, например: включение звука, появление световой индикации, создание оригинальных шоу-эффектов. Не менее привлекательными выглядят результаты такого эксперимента в их представлении на экране монитора в виде графиков функций, отображаемых в реальном времени по ходу эксперимента. Робототехника является эффективным с р е д с т в о м и н д и в и д у а -л и з а ц и и о б у ч е н и я учета интересов и уровня подготовки учащихся). Это обеспечивается разнообразием учебных наборов по робототехнике и сопровождающих их учебных материалов, ориентированных на развитие технического творчества детей. Видовым разнообразием роботов и направлений их применения. Дополнительным важным фактором в этой связи является организация конкурсного и соревновательного движений по робототехнике. 2. Развивающие и воспитательные функции робототехники. Возможность выдвижения собственной идеи и самостоятельного определения конструкции робота, а также его различных функций - важное условие удовлетворения значимых психологических потребностей ребёнка: в выборе, в получении результата «здесь и сейчас», в самореализации, в успехе. Эффективными в этом случае являются приёмы обучения, связанные с обсуждением возможных вариантов конструкции робота, разбором достоинств и недостатков этих вариантов, определением наилучшего из них, созданием действующей модели робота и защитой подготовленного проекта, а также применение результатов проектирования в учебном процессе по физике, участие с проектом в конкурсном движении или соревнованиях по робототехнике. Выполнение различных заданий по образовательной робототехнике (как учебных, так и творческого характера) обеспечивает активное развитие у учащихся всех п о з н а в а т е л ь н ы х п р о ц е с с о в . Совершенствуются восприятие, представление, воображение, мышление, память и речь учащихся. Занятия робототехникой оказывают особое влияние на развитие м о -т и в а ц и и у ч е б н о й д е я т е л ь н о с т и . Эффект этого воздействия связан, как минимум, с непосредственным интересом учащихся к роботизированным устройствам как новому инновационному направлению развития современной техники. Практико-ориентированный характер занятий робототехникой – тоже значимый фактор этого влияния. Занятия робототехникой обеспечивают формирование у учащихся л и ч н о с т н ы х к а ч е с т в (мотивации, самостоятельности и инициативности, трудолюбия и ответственности за качество полученного результата, коммуникабельности и толерантности, стремления к достижениям и уверенности в себе и др.). Занятия робототехникой – это эффективный «инструмент» р а з в и -т и я как и н д и в и д у а л ь н о г о , так и к о л л е к т и в н о го т в о р ч е -с т в а детей и юношества. Создание нового оригинального робота – это почти всегда командная работа, предмет активной коммуникации и расширения круга общения, средство адаптации и социализации ребенка, в том числе его техносоциализации, что в условиях стремительно развивающейся техносреды становится чрезвычайно важным для каждого человека. Несомненна роль робототехники в развитии такого комплекса качеств личности, который определяется как «soft skills» (софт скилс, от англ. — «мягкие навыки»). Это личностные качества и универсальные ЗУН, которые повышают эффективность работы любого человека в его взаимодействии с другими людьми. «Soft skills» позволяют быть успешным независимо от специфики и направления деятельности. Это навыки межличностного общения (для сравнения «hard skills» – умелые руки, т. е. профессиональные навыки). Перечень «мягких навыков» достаточно широк. Выделяют их виды. Одним из главных среди них многие авторы считают умение человека работать в команде, что особенно важно в современном обществе (Институт Макса Планка, Мюнхен, Германия) [145]. Робототехническую систему, особенно учитывая необходимость междисциплинарных решений в ее разработке, в одиночку качественно сделать почти невозможно. Это, безусловно, командная работа, которая является важным условием развития широкого комплекса личностных качеств, объединенных в две большие группы – «hard skills» и «soft skills». Робототехника в школе является эффективным средством п р о -е к т н о - о р и е н т и р о в а н н о г о о б у ч е н и я , которое оказывает влияние на развитие всего комплекса личностных качеств учащихся. Проектная деятельность по робототехнике при обучении физике рассматривается в п. 2.4. Степень вовлечённости школьников в процесс освоения робототехники определяется уровнем обучения (базовый, расширенный, углубленный) (см. п. 1.4). Данная степень определяет образовательный эффект занятий робото-техникой при обучении физике. 2.4. Применение робототехники в учебной, исследовательской и проектной деятельности учащихся по физике Как отмечалось ранее, образовательная робототехника как средство обучения существенно расширяет предметную основу формирования технических знаний учащихся, организации их учебной технической деятельности и освоения технических умений. В настоящем исследовании мы выделяем четыре вида технической деятельности учащихся в области образовательной робототехники: учебную, исследовательскую, проектную и проектно-исследовательскую. Учебная деятельность связывается в настоящем исследовании с выполнением школьниками лабораторных заданий на готовых роботизированных установках (установках для РТ-экспериментов, РТ-объектов техники различного назначения). Учащимся для выполнения заданий предлагаются инструктивные материалы (см. подробнее п. 2.5). Исследовательская деятельность соотносится с применением роботизированных установок в учебно-исследовательском физическом эксперименте. В этом случае школьники тоже работают на готовых роботизированных установках. Перед учащимися ставятся задачи изучения устройства и функционала РТ-установки, а также планирование и проведение физического исследовательского эксперимента с ее применением. Проектная деятельность – это деятельность по созданию конкретной модели робота. Заранее известный результат - это главный критерий отличия проектной деятельности от исследовательской, для которой конечный результат не очевиден. Проектное задание формулирует учитель. В задании определяется назначение модели робота и формулируются требования к его функционалу. Назначение модели должно быть связано, так или иначе, с демонстрацией технических приложений физики как области научного знания. Проект в частности может быть связан с разработкой установки для физическо- го РТ-эксперимента. Учащиеся могут воспользоваться предложенным им руководством к выполнению проекта. В другом случае им могут быть даны лишь общие рекомендации к работе. Это зависит от уровня готовности школьников к самостоятельной проектной деятельности. Если перед учащимися формулируется лишь общая идея проекта (разработка модели робота заданного назначения) и конечный его результат не вполне очевиден, то в этом случае их деятельность должна быть определена как проектно-исследовательская. В этом случае учащиеся самостоятельно решают весь комплекс задач по созданию модели робота, Каждый из видов деятельности должен быть обеспечен соответствующим дидактическим сопровождением (подробнее см. п. 2.4.). Рассмотрим особенности проектной и проектно-исследовательской деятельности учащихся с применением робототехники в учебном процессе по физике. Теоретико-методологическую основу применения метода проектов в настоящем исследовании составили труды по организации проектной деятельности учащихся (Дж. Дьюи, В. X. Килпатрик, А. В. Леонтовича, А. Ю. Пентина, Е.С. Полат, С. Т. Шацкого и др.). При применении метода проектов в настоящем исследовании использовались результаты диссертационных работ В.Б. Гундырева [33], О.Ю. Дергуновой [36], Н.В. Матяш [91], Н.Ю. Пахомо-вой [122], И.Д. Чечель [172], и др. Проектная деятельность по робототехнике обладает особым комплексным образовательным воздействием, обеспечивающим в равной степени и обучение, и развитие, и воспитание личности учащегося. Работа над проектами по робототехнике может быть организована как в рамках учебного процесса по предмету, так и во внеурочное время. Проектную деятельность целесообразно связывать с проведением школьных, городских региональных и всероссийских робототехнических конкурсов и олимпиад, в которых школьники участвуют в массовом порядке и с большим энтузиазмом. Участие и победы в конкурсном и соревновательном движениях являются серьезными стимулами к организации робототехнического творчества учащихся. Проектная деятельность по образовательной робототехнике в учебном процессе по физике может быть направлена: 1) на создание нового робота или модернизацию имеющегося (конструктивные, элементные и программные обновления) для решения исследовательской или прикладной учебной задачи на базе наборов по робототехнике от конкретного производителя; 2) создание нового робота или модернизацию имеющегося для решения исследовательской или прикладной учебной задачи на основе: а) самостоятельной разработки новых датчиков и других систем робота, расширяющих возможности его практического применения; б) использования робота совместно с другими техническими системами, в том числе оборудования школьного кабинета физики. Фактически это три вида учебных проектов, основанием для выделения которых являются цель проекта и особенности технического обеспечения его выполнения. Примеры проектов первого и второго видов. Одним из таких примеров является модель роботизированного физического эксперимента по исследованию закономерностей падения тел, созданная учащимися на базе робототехнического конструктора Lego Mindstorms EV3. Экспериментальная установка показана на рисунке 8, а. С ее помощью можно определить ускорение падения тела, доказать, что это движение является равноускоренным, показать влияние на процесс различных факторов или таковых закономерностей. Эксперимент по времени длится не более минуты. При выполнении эксперимента роботом фиксируются: 1) значения ускорений падения нескольких одинаковых шариков и среднее значение ускорения; 2) время прохождения шариками расстояний, относящихся по величине как ряд нечетных чисел (1:3:5). Как только все шарики будут сброшены, робот подает сигнал о необходимости пополнения числа исследуемых объектов, запроса об изменении условий проведений эксперимента или его завершении. В ходе исследования можно менять условия постановки опыта: высоту падения, характеристики падающих тел (объем, массу и даже форму). Результаты эксперимента выводятся на экран микропроцессора. После создания учащимися первой версии данного роботизированного эксперимента (рис.8, а) им могут быть предложены задания по модернизации конструкции робота-экспериментатора, например: 1) замена в экспериментальной установке трех стационарных датчиков одним подвижным; 2) обеспечение автоматической доставки падающих шариков в устройство для их сброса; 3) реализация супервизорного управления с целью автоматический замены объектов исследования – падающих тел. Вариант выполнения первого задания представлен на рисунке 8, б.   а б Рис. 8. Модель роботизированной экспериментальной установки для исследования явления свободного падения: а) с тремя стационарными датчиками, б) с одним подвижным датчиком (М.Г. Ершов [195]) Рассмотрим еще один из учебных проектов, связанный с разработкой РТ-установки на основе набора LEGO Mindstorms EV3 для изучения законов сухого трения. На рисунке 9 представлена установка для проведения данного эксперимента. Отметим, что это роботизированный эксперимент с автономным управлением. Для проведения эксперимента на столе размещается дорожка из комбинации поверхностей различного рода и сани с грузами. Сани приводятся в движение с помощью нити, прикрепленной к электродвигателю через датчик силы. На санях установлен датчик света, контролирующий смену участков движения. Имеются устройства (преграды) для последовательного сбрасывания грузов с саней (в ходе эксперимента технологически проще уменьшать массу тележки, а не увеличивать). В перемещении саней по комбинированной поверхности выделены четыре этапа. Это движения: 1) по поверхности первого вида с прорезью для обеспечения малой площади соприкосновения, 2) по сплошной поверхности этого же вида, 3) по сплошным поверхностям второго и третьего видов; 4) по поверхности третьего вида с последовательным уменьшением нагрузки (силы нормального давления).  Рис. 9. Установка для изучения законов сухого трения (М.Г. Ершов [130]) Программа управления экспериментом настроена так, что на первом этапе эксперимента измеряется сила трения скольжения по трем различным поверхностям (при этом осуществляется автоматическое усреднение силы трения на каждом из этапов движения). На втором этапе измеряются значения силы трения при последовательном сбрасывании грузов с тележки (т.е. при уменьшении силы нормального давления). Датчик света фиксирует переход тележки на каждый новый этап движения и запускает необходимые обновления программы управления экспериментом. В конце пути сани автоматически оста навливаются. На экран микропроцессора в реальном времени выводятся данные, демонстрирующие значения силы трения на каждом этапе движения. Их анализ позволяет установить следующие факты: 1) независимость силы трения скольжения от площади поверхности, 2) зависимость силы трения скольжения от рода поверхности, 3) зависимость силы трения скольжения от силы нормального давления. Модернизация эксперимента может быть связана с выполнением следующих заданий: 1) обновление программы управления экспериментом с целью фиксации датчиком силы в начале движения (в момент сдвига) значения силы трения покоя для доказательства превышения силы трения покоя над силой трения скольжения для одной и той же поверхности при одинаковой силе нормального давления; 2) возвращение системы в исходное состояние для проведения повторного эксперимента, 3) поиск нового (более надежного) способа изменения силы нормального давления. Как видно, для выполнения этих проектов не используется специальное дополнительное оборудование. Необходимы лишь простейшие вспомогательные средства и материалы (штативы, подставки, грузы, шарики, шнуры и т.п.). Проекты третьего вида. Эти проекты принципиально отличаются от предыдущих. При их выполнении может понадобиться оборудование школьного кабинета физики, кабинета технологии, а также домашняя бытовая техника, а в ряде случаев специальные инструменты. Благодаря применению этих дополнительных средств могут быть решены более сложные, в том числе оригинальные технические задачи. Рассмотрим примеры проектов этого вида. М о д е л ь м а г н и т н о й п е р е д а ч и: магнитная муфта (одна из конструкций этого проекта была представлена в п. 2.2, рис. 7). Как отмечалось ранее, работа магнитной муфты обеспечивается взаимодействием двух магнитных шестерёнок. При их сближении возникает «магнитное сцепление», в результате чего вращение одной шестеренки передается другой. Учащиеся не просто разработали данный проект. На его основе была создана лабораторная работа по изучению магнитного взаимодействия. В лабораторной установке ведомая шестерёнка была закреплена на валу, вращающемся в магнитных подшипниках (рис. 7, п. 2.2). Вал свободно извлекался из конструкции, что облегчало ее сборку и демонтаж. В качестве крепёжных узлов использовались детали из пластика, которые были самостоятельно изготовлены учащимся. Ведущая шестерня устанавливалась на подвижную подставку, которая обеспечивала ее приближение и удаление от ведомой магнитной шестерни. Перемещение подставки осуществилось с помощью электродвигателя, который управлялся компьютерной программой. Программно регулировалась скорость вращения ведущей шестерёнки. Увеличение и уменьшение скорости вращения могло обеспечиваться либо по времени, либо с помощью ручного управления (за счет срабатывания датчика расстояния при приближении к нему руки). Следует отметить, что при увеличении скорости вращения ведущей шестерёнки магнитное сцепление «исчезало». В лабораторной работе перед учащимся ставились следующие задачи: 1) определить частоту вращения ведомого вала; 2) исследовать зависимость магнитного сцепления от скорости вращения ведущей шестерни и расстояния между шестерёнками (рис. 10). Для определения частоты вращения ведомой шестерёнки использовался датчик света. Поверхность диска шестерни была разделена на секторы, окрашенные попеременно в чёрный и белый цвета. За счет этого во время вращения шестеренки обеспечивалась разная освещённость датчика света. При срабатывании датчика блок NXT издавал звуковые сигналы. Значение уровня освещённости датчика выводилось на монитор компьютера в виде графика зависимости уровня освещения от времени (рис. 11). Эти данные позволяли определить частоту вращения ведомого вала. Позднее к установке была подключена для наглядности лампа. Частота мерцания лампы была равна частоте вращения шестерёнки.  Рис. 10. Выполнение учащимися лабораторной работы по изучению магнитной передачи Впоследствии учащиеся (авторы проекта) разработали программу для автоматического расчета частоты вращения вала. Это позволило выводить ее численное значение на дисплей микропроцессора. При выполнении лабораторной работы школьники могли на программном уровне регулировать скорость вращения ведущей шестерни и расстояние между шестерёнками. Это обеспечивало более эффективное исследование особенностей магнитной передачи. После разработки проекта по изучению свойств магнитной передачи школьниками было изготовлено еще несколько конструкций: миксер, магнитный патрон для станка и др., в которых раскрывались возможности бытового применения эффекта магнитной передачи. Видеофрагмент с описанием установки и демонстрацией ее работы представлен по адресу: http://youtu.be/zv0pZJvLAKs Отметим, что учащиеся, подготовившие проект «Магнитная лаборатория», не только создали полезную для учебного процесса лабораторную работу, но и стали победителями региональной конференций по образовательной робототехнике, а также завоевали приз зрительских симпатий на всероссийском фестивале «РобоФест–2012». Моделированиетерморег уляцииядерно го реактор а и рег улиро вк и интенсивно сти яде р -н о й р е а к ц и и . Данная модель демонстрирует некоторые элементы устройства ядерного реактора, используемого для производства электроэнергии, а также процессы теплообмена в его энергоблоке (рис. 12). 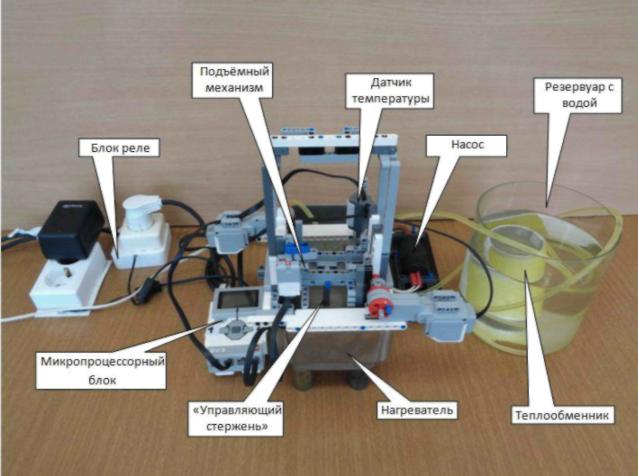 Рис. 12. Модель терморегуляции ядерного реактора и регулировки интенсивности ядерной реакции Рост температуры активной зоны реактора имитируется нагреванием воды (с помощью электронагревателя). Вода в данной модели выполняет еще одну функцию: является теплоносителем. Температура «активной зоны» может понижаться за счёт принудительной циркуляции потоков жидкости между сосудом-нагревателем и дополнительным сосудом с холодной водой. Циркуляция поддерживается за счет работы насоса. Дополнительное охлаждение «активной зоны» возможно за счет воздушной вентиляции (например, от фена). Управление работой нагревателя, насоса и фена осуществляется на программном уровне. Для этого используется электромагнитное реле. Контроль температуры «активной зоны» осуществляется датчиком температуры. В верхней части реактора установлена система, имитирующая движение управляющих стержней. Изначально стержни находятся вне «активной зоны». При превышении допустимого значения температуры «активной зоны» реактора срабатывает датчик. Стержни опускаются в «активную зону», «обеспечивая» снижение интенсивности ядерной реакции. Это достигается за счет включения насоса и запуска процесса циркуляции воды. При понижении температуры «активной зоны» до необходимого значения вновь срабатывает датчик, и стержни извлекаются. Управление работой «реактора» осуществляется как в ручном режиме, так и в автоматическом. В ручном режиме оператор, используя датчик касания, может включать и выключать нагреватель, а также включать и выключать насос, обеспечивающий циркуляцию теплоносителя через «активную зону». В автоматическом режиме система на программном уровне поддерживает температуру в рамках заданного интервала за счёт периодического включения нагревателя и насоса. Значение температуры в «реакторе» выводится на экран микропроцессора или компьютера. После успешного выступления школьников в ряде городских и краевых соревнований проект был расширен до модели атомной электростанции, в которой в качестве отдельных элементов были включены модели парогенератора, блока генерации электроэнергии и линия электропередачи с потребителями электроэнергии (рис. 13).  Рис. 13. Роботизированная модель атомной электростанции В модели была реализована система диагностики исправности работы различных блоков АЭС. На отдельные индикаторы выводились сигналы: отказа насоса перекачки теплоносителя (для этого был использован датчик давления), остановки турбины парогенератора (применялся отдельно сконструированный датчик движения воздуха на базе датчика освещённости), исчезновения напряжения на электрогенераторе (срабатывал датчик напряжения). В случае возникновения аварийной ситуации к месту аварии выезжал робот, имитирующий выезд аварийно-спасательной бригады. Как отдельная конструкция была разработана система аварийной защиты реактора от перегрева и возгорания (рис. 14). Блок защиты был собран на базе конструктора для прототипирования датчиков (SuperPro Prototype Sensor), подключаемого к микропроцессорному блоку Mindstorms. В блоке защиты имелась отдельная кнопка для отключения реактора, а также переключатель для перевода реактора в режим работы без защиты. Благодаря возможности отключения блока защиты и ручного отключения насоса на модели можно было частично смоделировать процесс, приведший к аварии на чернобыльской АЭС. Для защиты от пожара в системе использовался датчик пламени. В случае срабатывания датчика (например, от зажигалки) реактор переходил с состояние гашения ядерной реакции (отключался нагреватель и в «активную зону» опускались аварийные стержни), включалась сирена, и к реактору выезжал робот-спасатель с целью обнаружения источника возгорания по инфракрасному датчику. 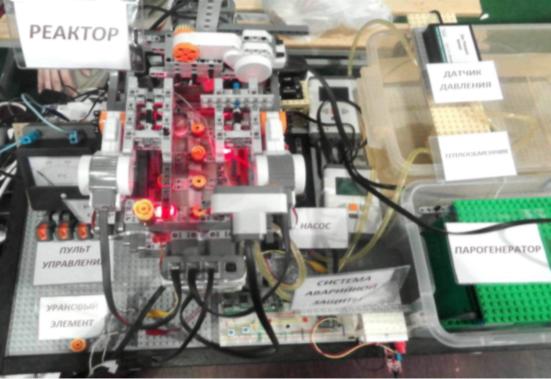 Рис. 14. Элементы роботизированной модели атомной электростанции На всероссийском фестивале «РобоФест-2015» этот проект также был отмечен призом зрительских симпатий. Модель фрезерного станка на основе Lego M i n d s t o r m s . Современные станки с числовым программным управлением являются разновидностью робототехнических систем. Работа на данных станках становится доступной для старшеклассников, которые проявляют интерес к технической деятельности. Традиционные технологии обработки материалов и инновационные идеи робототехники в своем сочетании открывают интересные перспективы в разработке школьных робототехнических проектов межпредметного характера (физика – технология – информатика). Модель фрезерного станка с ЧПУ была сконструирована и запрограммирована учащимися старших классов средней школы на базе нескольких конструкторов LEGO Mindstorms (рис. 15). На данном станке можно производить обработку мягких материалов (парафин, пенопласт). Станок имеет металлическое основание, к которому жёстко крепится электрическая дрель в качестве привода для инструмента. Заготовка монтируется на основании, которое может перемещаться в трёх плоскостях. Эта часть конструкции сделана из деталей и сервомоторов конструктора. В автоматическом режиме работы станка перемещение основания обеспечивается компьютерной программой. Для ручного управления движением заготовки в конструкции предусмотрены три пары датчиков касания, срабатывание которых приводит к перемещению основания в двух направлениях вдоль каждой из трёх осей: вперёд – назад, влево – вправо, вверх – вниз. На данном станке можно производить обработку материалов через Bluetooth (например, с телефона).  Рис. 15. Модель фрезерного станка с ЧПУ, выполненного на базе нескольких конструкторов LEGO Mindstorms При создании модели, а затем в процессе ее демонстрации на уроках физики обсуждались вопросы относительности движений, сложения движений, физические основы работы технических узлов конструкции, в том числе устройств беспроводной связи. Во время демонстрации модели станка ЧПУ на конкурсах и выставках все желающие могли выполнить обработку какой-либо детали (рис. 16).  Рис. 16. Работа посетителей выставки с моделью станка С ЧПУ на всероссийском фестивале «РобоФест–2013» Авторы этого проекта стали победителями городского и призёрами регионального туров олимпиады по технологии, победителями регионального фестиваля «РобоФест–2013» и призёрами всероссийского фестиваля «Робо-Фест–2013» в категории «Фристайл» (II место). Проектная деятельность школьников по образовательной робототехнике помимо обучающего эффекта имеет еще и большое воспитательное значение. Работа над проектом и его публичная защита способствуют становлению у учащихся целого комплекса значимых личностных качеств, а также формированию умения работать в команде (см. ранее в п. 1.4) [130, с.368–373]. Итак, в данном параграфе робототехника анализируется как средство обучения, расширяющего предметную основу формирования технических знаний, организации учебной, исследовательской и проектной деятельности, освоения учащимися технических умений. Рассмотрены особенности организации проектной деятельности учащихся по робототехнике в учебном процессе по физике, определены разновидности учебных проектов. Дано описание примеров проектов для учебного исследования и технического творчества учащихся в учебном процессе по физике. 2.5. Методическое сопровождение и дидактическое обеспечение применения робототехники в обучении физике. Учебные модули по образовательной робототехнике Применение робототехники в учебном процессе по физике связано с изменением методики и технологии организации учебных занятий, меняется частично и содержание учебной работы школьников. В связи с этим практика включения образовательной робототехники в учебный процесс по предмету должна быть обеспечена необходимыми методическими и дидактическими материалами. В рамках настоящего диссертационного исследования разработаны: 1) методические материалы для учителя физики, включающие: а) междисциплинарную программу по образовательной робототехнике; б) характеристику предметной составляющей данной программы (физика); в) методические рекомендации учителю по реализации трехкомпонентной модели обучения робототехнике в учебном процессе по физике (РТ как объект изучения, РТ как инструмент познания, РТ как средство обучения, развития и воспитания учащихся); г) методические таблицы «Изучение научных основ элементной базы робототехнических объектов в разделах и темах школьного курса физики»; д) модели роботизированных установок для учебных демонстраций; е) тематические методические модули, включающие рекомендации: по по становке демонстрационного роботизированного физического эксперимента; подготовке и проведению демонстраций роботизированных моделей технических объектов как технических приложений физики (12 модулей); 2) дидактические материалы для учащихся: а) роботизированные установки лабораторного физического эксперимента; б) дидактические модули «Лабораторный роботизированный физический эксперимент» (12 модулей) в состав которых входят: учебные фото и видеоматериалы; дидактические материалы для самостоятельной работы трех уровней сложности; управляющие программы для лабораторных РТ-экспериментов; учебные задания и проекты, ориентированные на учебную и внеурочную работу по физике, а также соревновательную и конкурсную деятельность учащихся по робототехнике; 3) программа и учебно-методическое обеспечение элективного курса «Лабораторный практикум по физике с применением образовательной робототехники. Механика». Содержание части методических материалов и дидактические материалы по образовательной робототехнике для удобства использования объединены в цифровые тематические модули. Каждый тематический модуль включает четыре блока, а именно: роботизированный демонстрационный физический эксперимент, роботизированный лабораторный физический эксперимент, демонстрации и лабораторную работу с роботизированной моделью технического объекта, 4) учебные задания и проекты по робототехнике физико-технической направленности. В тематический модуль входят фото- и видеоматериалы, управляющие программы для роботизированных демонстраций и лабораторных работ по физике. Ниже приведена характеристика указанных блоков модуля. Раскрывается их структура и содержание. Отметим, что второй блок имеет три варианта реализации, связанные с различиями в уровне познавательной самостоятельности учащихся. Блок 1. Роботизированный демонстрационный физический эксперимент Перечень оборудования для демонстрационного эксперимента, включая элементы робототехнического конструктора. Описание конструкции роботизированной установки и последовательности её сборки. Варианты реализации базовой конструкции. Мультимедиа сопровождение сборки установки: пошаговые инструкции для воспроизведения ее отдельных узлов и конструкции в целом. «Готовая» управляющая программа для робота (в ряде случаев ее возможные модификации) и описание особенностей работы этой программы. 6. Фотоснимки и видеозапись работы установки и основные результаты учебной демонстрации в виде таблиц, графиков, отдельных числовых значений, качественных данных эксперимента, представленных в фото- и видеоформатах. Комментарий: Первый блок предоставляет учителю выбор следующих вариантов работы: а) демонстрация учителем на уроке в и д е о з а п и с и роботизированного физического эксперимента (устройства и принципа действия основных узлов установки, хода опыта и его основных результатов); знакомство учащихся с содержанием управляющей программы робота; б) сборка и демонстрация учителем н а т у р н о й у с т а н о в к и роботизированного физического эксперимента с аналогичным дидактическим сопровождением; в) организация подготовки натурного роботизированного демонстрационного эксперимента группой учащихся в рамках выполнения индивидуального творческого проекта; проведение учителем консультаций, оказание помощи школьникам, предъявление необходимых инструктивных материалов; предоставление учащимся возможности самостоятельно продемонстрировать работу установки на уроке физики. Блок 2. Лабораторная работа Выполнение лабораторной работы по инструкции (1-й уровень самостоятельности) Цели работы (предметная, конструкторская, технологическая в сфере IT). Перечень оборудования для лабораторного эксперимента. Инструкция по сборке роботизированной установки (в том числе, с применением средств мультимедиа, например, программы LEGO Digital Designer). Управляющая программа робота, обеспечивающая его функционал. Инструкция с иллюстрациями по проведению лабораторной работы с помощью роботизированной установки. Видеозапись работы установки. Методические рекомендации учителю по организации работы учащихся. Комментарий: Выполнение работы по варианту 1 позволяет учащимся: а) освоить практику работы по инструкции, поддерживающей его деятельность по сборке и проведению роботизированного физического эксперимента; б) отработать комплекс основных экспериментальных умений; в) убедиться, используя видеозапись эксперимента, в правильности сборки робота и выполнения им необходимых функций (самоконтроль). Выполнение лабораторной работы по описанию (2-й уровень самостоятельности) Цели работы (предметная, конструкторская, технологическая в сфере IT). Перечень оборудования для лабораторного эксперимента. Общая характеристика роботизированной конструкции экспериментальной установки и программы, обеспечивающей функционал робота. Характеристика возможных модификаций базовой конструкции. Основное задание по работе с базовой конструкцией и дополнительные задания по работе с различными модификациями конструкции и корректировке программы управления роботом. Методические рекомендации учителю по организации работы учащихся. Комментарий: При выполнении лабораторного задания по варианту 2 учащиеся, познакомившись с назначением, общей идеей сборки роботизированной конструкции и особенностями программы управления роботом, должны: а) самостоятельно спланировать и осуществить роботизированный эксперимент; б) написать для робота управляющую программу; в) протестировать робота; г) провести эксперимент, получить и проанализировать его результаты; д) выполнить задания по преобразованию конструкции и соответствующему изменению управляющей программы робота, а также осуществить комплексные модификации конструкции установки, реализующие различные сценарии ее работы. Самостоятельное планирование и проведение учебного исследования с применением роботизированной установки (3-й уровень самостоятельности) Цели работы (предметная, конструкторская, технологическая в сфере IT). Формулировка общей идеи роботизированного эксперимента. Самостоятельная разработка и описание конструкции установки. Сборка конструкции учащимся. Возможна подготовка мультимедиа сопровождения по сборке (например, в программе LEGO Digital Designer). Написание учащимся управляющей программы для робота. Самостоятельное описание порядка работы экспериментальной установки. Возможна подготовка видеозаписи ее работы. Методические рекомендации учителю по организации работы учащихся. Комментарий: Выполнение работы по варианту 3 позволяет учащимся проявить высокий уровень самостоятельности и творчества в выполнении задания. Работа на этом уровне требует достаточного продолжительного времени (до 2-х учебных часов в условиях работы в классе, возможны дополнительная работа в домашних условиях или во внеурочное время в школьной лаборатории). Учитель при необходимости может проконсультировать учащихся по выполнению отдельных этапов работы. Блок 3. Демонстрации и лабораторные работы, моделирующие использование роботизированной конструкции в технике Третий блок включает две составляющие: учебную демонстрацию и/или лабораторную работу прикладной направленности. Структура этих составляющих аналогична блокам 1 и 2. Демонстрации готовит и проводит учитель с помощью роботизированных конструкций, которые позволяют ему показать школьникам применение знаний о физических явлениях в робототехнике. В ходе лабораторного эксперимента школьники могут выполнить задание на основе «готовой» модели роботизированного технического объекта и соответствующих инструктивных указаний к работе с данной моделью. Учащимся может быть предложено более сложное задание: самостоятельно разработать конструкцию модели роботизированного технического объекта, написать управляющую программу и протестировать степень надежности исполнения роботом его основных функций. Блок 4. Учебные задания и проекты Четвертый блок связывается с выполнением учащимися небольших учебных заданий и творческих проектов. Задания, как правило, направлены на модернизацию роботизированной установки, совершенствование ее управляющей программы, а проекты – на создание новой модели робота. Учащимся целесообразно предлагать для разработки проекты, связанные с применением робототехнических конструкций в различных сферах производства, культуры и быта. Принципиально важно, чтобы в основу работы предлагаемых учащимися конструкций были положены в числе прочих физические явления и законы их протекания. При подготовке сложных проектов школьниками может быть использовано несколько робототехнических наборов. Сложные учебные проекты выполняются школьниками, как правило, в рамках элективных курсов или во внеурочной работе (на занятиях кружка по физике, при подготовке к участию в научно-практических конференциях и конкурсах по робототехнике и др.). Рассмотрим в качестве примера описание основных блоков учебного модуля по теме «Равноускоренное движение». ОСНОВЫ КИНЕМАТИКИ |