Перевод Радар. Радар использующий однородную прямоугольную антенную решетку дл. Радар использующий однородную прямоугольную антенную решетку для обнаружения дронов с низким эпр
 Скачать 2.03 Mb. Скачать 2.03 Mb.
|

|
Радар использующий однородную прямоугольную антенную решетку для обнаружения дронов с низким ЭПР Аннотация — Дроны становятся всё более доступными для широкой общественности и всё чаще используются в сфере досуга и в коммерческих целях. этот бум использования дронов способствовал появлению новых угроз в области безопасности. Из-за своей большой маневренности и небольших размеров БПЛА могут использоваться для многочисленных миссий и очень сложны в обнаружении. Радиолокационная технология с ее всепогодными возможностями может играть важную роль в обнаружении угроз на базе БПЛА и в защите критически важных объектов, но стандартный радар плохо подготовлен к обнаружению БПЛА. БПЛА — это низкоскоростные самолеты с очень слабой заметностью. Обсуждается радиолокационное моделирование и приводятся предварительные результаты. В целом радар X-диапазона с возможностью электронного сканирования может способствовать надежному и доступному решению для обнаружения БПЛА. Радар может быть технологией для обнаружения дрона и его характеристик. Ключевые слова: дрон, беспилотник, БПЛА, радиолокационное обнаружение, эффективная площадь рассеяния, однородная прямоугольная антенная решетка. Введение В настоящее время мы переживаем бум использования беспилотников не только в оборонных целях, но и в коммерческих, профессиональных и развлекательных. Дроны обеспечивают новую форму развлечения для всех с отличными мультимедийными результатами. Коммерческие беспилотники имеют много положительных и законных применений, но все чаще возникают опасения, что беспилотники используются для незаконной и опасной деятельности. Полеты слишком близко к пассажирским самолетам, контрабанда наркотиков и оружия в тюрьмы, проблемы конфиденциальности, террористические атаки, вооруженные беспилотники, этот список растет с каждым днем, как и инциденты. [1] Таким образом, наравне с этим бумом беспилотников компетентные органы поспешили обновить сопутствующее законодательство, и появилось множество систем обнаружения и сбивания беспилотников. Среди всех них (например, акустические или видеосистемы) радиолокационные системы позиционируют себя на шаг впереди из-за присущих им преимуществ (например, их независимость от погодных условий или условий освещения, а также их пригодность для оперативных нужд обнаружения беспилотных летательных аппаратов [2]). Несмотря на это, обнаружение коммерческого БПЛА является реальной проблемой для радиолокационных технологий, главным образом из-за его небольших размеров и пластиковых и малоотражающих материалов, что приводит к его очень низкой радиолокационной сигнатуре и способности медленно летать на уровне земли, заставляя отражённый сигнал от него конкурировать с сигналами с высоким уровнем помех. В данной статье представлены результаты моделирования РЛС с фазированной антенной решеткой, которая периодически сканирует область для обнаружения беспилотника «DJI Phantom 2». Технологии наблюдения Аудио способ Во время полета дронов, звуки, производимые двигателями и быстро вращающимися пропеллерами, могут быть использованы для обнаружения, классификации и локализации дронов системой, оснащенной акустическими датчиками. Акустические сигнатуры дронов могут быть получены с помощью анализа как во временной, так и в частотной областях. Однако аудио наблюдение чувствительно к окружающему шуму и страдает от ограниченной дальности обнаружения, которая зависит от типа дрона и условий тестирования. Например, Christnacher et al. разработали сеть тетраэдрических акустических решеток, наибольшие дальности обнаружения которых для различных дронов составляли: 150 м для индивидуального дрона, более 250 м (до 300 м) для DJI Phantom 2.[3] Видео способ Обнаружение дронов на основе видеоизображений — это, по сути, проблема обнаружения объектов в области компьютерного зрения и распознавания образов. Объект может быть обнаружен по признакам его внешнего вида [4], то есть по цветам, контурным линиям, геометрическим формам или краям и т. д., или/и по особенностям его движения через соответствующие рамки [5]. Методы, основанные на признаках внешнего вида, имеют большие трудности в различении дронов от других подобных мелких объектов, например птиц, на загроможденном заднем фоне без информации о движении. Сравнивая последовательные изображения, положение и направление движения движущегося объекта могут быть определены методами, основанными на движении, которые также используются для отслеживания объекта. Радиочастотный способ Существующие на рынке дроны или индивидуальные дроны обычно общаются со своими контроллерами в определенных частотных диапазонах. Однако в практической среде существование многих других радиочастотных сигналов, например Wi-Fi, которые разделяют ту же полосу частот с дронами, делает обнаружение дронов на основе радиочастотных сигналов сложной задачей. Один простой способ-контролировать широкий диапазон ВЧ, например, 1 МГц - 6,8 ГГц в [6], и принимать любой передатчик неизвестных ВЧ-сигналов за беспилотник. Этот метод вызовет высокую вероятность ложных тревог, так как неизвестный радиочастотный передатчик не обязательно является беспилотником. Обнаружением радаром Считается, что радар является ценным устройством при обнаружении и классификации различных целей в городских условиях. [7] Однако радиолокационное обнаружение микро-БПЛА представляет собой сложные факторы: • Малый размер: Малая эффективная площадь рассеяния • Низкая высота и медленный полет • Основным материалом корпуса дрона является пластик: пластик может иметь диэлектрические свойства ближе к воздуху, что приводит к небольшому отраженному полю обратно к РЛС. • Птицы и БПЛА могут иметь сопоставимые значения радиолокационной сигнатуры и схемы полета, которые представляют собой очень сложную задачу классификаторов-разделить их. • Трудности, связанные с отделением цели от значительного помехового отклика. Обнаружение радаром Чтобы быть обнаруженным радаром, цели должны генерировать достаточно сильные сигналы (путем отражения передаваемого сигнала от их самих), чтобы аплитуда такого сигнала была выше амплитуды шума. Таким образом, отношение сигнал / шум (SNR; Signal to Noise Ratio) является ключевым определяющим измерением, которое определяет, могут ли цели вообще быть замечены радаром. Для БПЛА требуются SNR, превышающие 14 дБ, чтобы обеспечить надежное обнаружение с приемлемой частотой ложных тревог. Максимальное отношение сигнал / шум получается на выходе приемника при использовании согласованного фильтра. Соотношение сигнал / шум для принимаемого сигнала дается классическое уравнение радиолокации [8]: 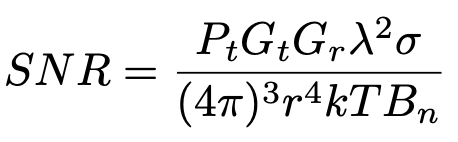 (1) Где SNR – отношение сигнал/шум Pt – мощность передатчика Gt – усиление передающей антенны Gt – усиление приёмной антенны λ – длинна волны σ – ЭПР объекта k – постоянная Больцмана T – эквивалентная температура шума приемника Bn – полоса пропускания шума r – расстояние от передатчика до объекта Отражательная способность объекта зависит от таких факторов, как материал, из которого он сделан, его размер, форма и угол, под которым волна попадает на объект. Это определяется как эффективная площадь рассеяния. Измерение ЭПР Эффективная площадь рассеяния или ЭПР – это параметр, описывающий свойство объекта отражать падающие на него волны. Особое значение для проектирования радиолокационных систем имеет точное знание о (ЭПР) определенной наблюдаемой цели. Из-за размеров и в основном неметаллических конструктивных компонентов беспилотника его ЭПР невелика по сравнению с обычными радиолокационными целями. Поэтому обнаружение и сопровождение беспилотных летательных аппаратов является серьезной проблемой для радиолокационных систем. Кроме того, низкая рабочая высота, а также быстрые маневры представляют собой дополнительные проблемы. Большинство конструктивных компонентов дрона DJI Phantom 2 сделаны из пластика, и только несколько деталей являются металлическими, что делает задачу обнаружение таких объектов сложной задачей Численный и экспериментальный ЭПР-анализ БПЛА на частоте 10 ГГц представлен в работе [9], полученные результаты исследования в работе [9] могут быть использованы для разработки методов радиолокационного обнаружения малых беспилотных летательных аппаратов с ЭПР от 0,01 м2 (-20 дБсм) и ниже в реальных условиях. Рабочая частота радара ЭПР большинства целей имеет тенденцию повышаться с частотой и будет способствовать использованию более высокой частоты. Для надежного ЭПР выбранная длина волны должна быть не более половины размера объекта для обнаружения, такого как двигатели и батареи дрона. При использовании доплеровского детектирования также полезно использовать более высокую частоту Характеристики цели Коммерческий беспилотник “DJI Phantom 2” предназначен как для частного, так и для профессионального использования. Таблица 1 показываю его основные черты. Основной материал корпуса дрона-пластик, пропеллеры сделаны из армированного стекловолокном композита, а четыре ротора также сделаны из углеродного волокна и пластика. По эффективной площади рассеяния дрона опубликовано значительное количество литературы, в работе [5] приведены результаты по ЭПР, полученные с помощью численного и экспериментального анализа, “DJI Phantom 2”. В этих статьях беспилотник моделируется как цель Swerling 1 [10] со средним ЭПР примерно 0,01 м2 (-20 дБсм). Этот беспилотник способен записывать свои телеметрические данные во время светового дня. Эти данные (например, координаты GPS, дальность действия, скорость) собираются на частоте дискретизации 10 Гц и легко экспортируются для дальнейшей обработки. [11]  Рисунок 1 Dji Drone Phantom 2 Таблица 1. Характеристики Dji Drone Phantom 2
Окружающая среда и конкретные задачи для радиолокации Радар может быть предпочтительной технологией для обнаружения беспилотника, но стандартный радар плохо подготовлен для обнаружения дронов. Дроны-это низкоскоростные БПЛА с очень слабой радиолокационной сигнатурой. Пытаясь обнаружить цели, радары сталкиваются с отражениями, исходящими от нежелательных объектов, ландшафта и осадков из окружающей среды. Эти нежелательные отражения называются радиолокационными помехами и могут быть приняты как цель. Цель может быть обнаружена только при условии, что аплитуда её отраженного сигнала выше системного шума и радиолакационных помех. При обнаружения беспилотных летательных аппаратов многие элементы вносят свой вклад в радиолокационный шум: осадки, городской ландшафт, наземные движущиеся цели и птицы – всё это создает шум, который, несомненно, снизит чувствительность радиолокационного обнаружения и создаст ложные тревоги. Решение и результаты симуляции 4.1 Описание решения Был смоделирован радар с фазированной антенной решеткой, способный обнаружить присутствие беспилотника. В этом моностатическом радаре используется однородная прямоугольная решетка размером 30 на 30 элементов. Этот радар периодически сканирует заданную область пространства. Поскольку электронное сканирование ограничено 90-градусным азимутальным сектором, на следующем этапе будет использоваться простой азимутальный поворотный стол для достижения полного охвата 360 азимутов при низких затратах. В таблице 2 приведены летно-технические характеристики этих РЛС X-диапазона. Таблица 2. Обзор технических характеристик РЛС
4.2 Однородная прямоугольная антенная решетка В нашем радаре используется 900-элементная однородная прямоугольная решетка (ОПАР) с интервалом между элементами (λ/2). Поскольку отраженные сигналы принимаются антенной решеткой, мы используем формирователь луча, указывающий на сканирующие направление, чтобы получить комбинированный сигнал. Фактически, формирование луча используется в фазированных антенных решетках для направления луча в определенном направлении. Если сигнал, принимаемый элементами, состоит из сигнала и помех (шума, помех, активного постановщика помех), то принятый сигнал не может быть интерпретирован, так как его нельзя отличить от сигнала помехи. Для обработки принятой смеси сигналов использовался обычный формирователь луча. Дальность, угол и доплеровская информация каждой цели извлекаются из отраженных импульсов. Эта информация, может быть, использована в дальнейших задачах, таких как оценка направления прибытия с высоким разрешением или отслеживание цели. 4.3 Обнаружение и оценка дальности Небольшие БПЛА были обнаружены на максимальной дальности 5 км. На рисунке 2 “Карта сканирования” показана обнаруженная цель (мы отчётливо видим пик) при ЭПР равному 0,01 м2 на высоте 2000+метров и по азимуту 0 градусов, с хорошей точностью. Необходимо, чтобы радар производил поиск от 45 градусов до -45 градусов по азимуту. Время возврата отражённой волны должно быть меньше 1 секунды, что означает, что сканирующий луч должен вернуться к тому же азимутальному углу в течение 1 секунды. Чтобы получить точную оценку целевых параметров, мы применяем пороговое обнаружение на карте сканирования. (Рис.3) Пик виден выше порога обнаружения, соответствующего целям, которые мы определили ранее. Мы можем найти расположение этих пиков и оценить дальность и угол каждой цели. 4.5 Оценка доплеровского сдвига Чтобы иметь возможность оценить доплеровское смещение целей, нам сначала нужно определить местоположение целей с помощью обнаружения дальности. Поскольку доплеровский сдвиг распространяет мощность сигнала как на I, так и на Q-каналы, нам нужно полагаться на энергию сигнала, чтобы сделать обнаружение. [12] После того, как мы успешно оценили дальность цели, мы можем оценить доплеровскую сдвиг для каждой цели.  Рисунок 2. Карта сканирования. 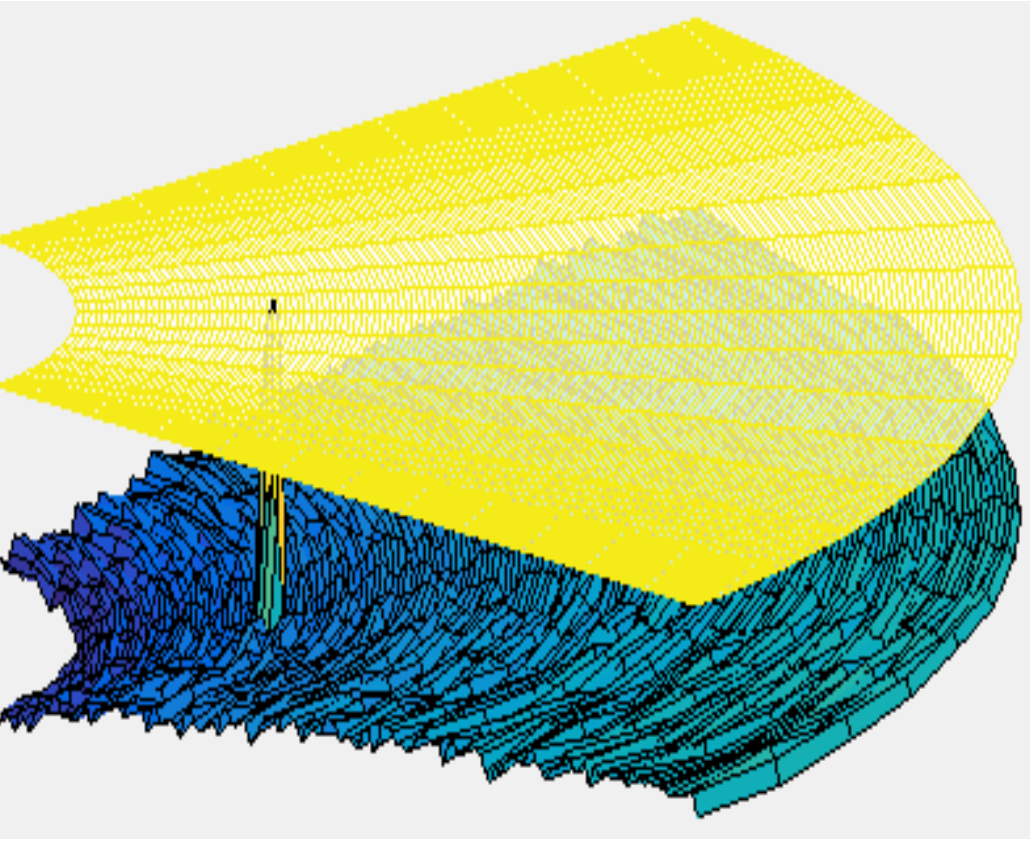 Рисунок 3. Определение порога на карте сканирования. Доплеровская оценка – это, по сути, процесс оценки спектра. Поэтому первым шагом в доплеровской обработке является генерация доплеровского спектра из принятого сигнала. Принятый сигнал после согласованного фильтра представляет собой матрицу, столбцы которой соответствуют принятым импульсам. В отличие от оценки дальности, доплеровская обработка обрабатывает данные через импульсы, которые находятся вдоль строк матрицы данных. Поскольку мы используем 10 импульсов, это есть 10 образцов, доступных для доплеровской обработки. Поскольку существует одна выборка из каждого импульса, частота дискретизации для доплеровских выборок является частотой повторения импульсов (ЧПИ). Как предсказывает теория Фурье, максимальный однозначный доплеровский сдвиг, который может обнаружить импульсная радиолокационная система, составляет половину её ЧПИ. Это также приводит к максимальной однозначной скорости, которую может обнаружить радарная система. Кроме того, количество импульсов определяет разрешающую способность в доплеровском спектре, которое определяет максимальное разрешение оценки скорости. Чтобы улучшить способность различать различные скорости, требуется больше импульсов. Однако количество доступных импульсов также ограничено радиальной скоростью цели. Поскольку доплеровская обработка ограничена заданным диапазоном, все импульсы, используемые в обработке, должны быть собраны до того, как цель переместится из одной области в другую. Чтобы оценить доплеровский сдвиг, связанный с каждой целью, нам нужно найти расположение пиков в каждом доплеровском спектре. Заключение В данной работе исследуется целесообразность использования РЛС с фазированной антенной решеткой для обнаружения дальности полета беспилотного летательного аппарата. Моделирование нашей РЛС показало, что это решение способно обнаружить беспилотник с ЭПР от 0,01 м2 (-20 дБсм) и ниже на дальности ≈ 5 км. Даже при обнаружении БПЛА может быть легко спутан с птицами. Различить угрозу беспилотника среди птиц-непростая задача, поскольку БПЛА спроектирован так, чтобы иметь сигнатуры (ЭПР), очень похожие на птиц. Эта работа будет освещена в будущих статьях, в которых будет обсуждаться классификация целей (дроны / птицы), изучение микро-доплеровского эффекта и невозможности реализации следящих фильтров. Список литературы ”Guide incidents drones” https://www.ecologique- solidaire.gouv.fr/sites/default/files/Guide incidents drones notification suivi.pdf , Juillet 2018. P. Poitevin, M. Pelletier, and P. Lamontagne, “Challenges in detecting UAS with radar,” in 2017 International Carnahan Conference on Security Technology (ICCST), 2017, pp. 1–6. F. Christnacher, et al., “Optical and acoustical UAV detection,” Proc. of SPIE Security+ Defence, vol. 9988, 2016, pp. 99880B-1–99880B-13. Z. Zhang, Y. Cao, M. Ding, L. Zhuang, and W. Yao, “An intruder detection algorithm for vision based sense and avoid system,” Proc. IEEE ICUAS, Arlington, VA, USA, Jun. 2016, pp. 550–556. S. R. Ganti and Y. Kim, “Implementation of detection and tracking mechanism for small UAS,” Proc. IEEE ICUAS, Arlington, VA, USA, Jun. 2016, pp. 1254–1260. DDC, “Domestic drone countermeasures,” http://www.ddcountermeasures.com/products.html, accessed on Apr. 17, 2017. UniversityofGlasgow,RadardetectionandclassificationofsmallUAVs and micro-drones”, Internet “media 480052 en”. David K. Barton, Radar System Analysis, Artech House, 1985. A. Schroder, M. Renker, U. Aulenbacher, A. Murk, U. Boniger, R.Oechslin, and P. Wellig, “Numerical and experimental radar cross section analysis of the quadrocopter DJI Phantom 2,” in 2015 IEEE Radar Conference, 2015, pp. 463–468. ”Chi-squared target models” https://en.wikipedia.org/wiki/Chi-squared target models [11] ”DJI PHANTOM 2 vision” https://www.mydronelab.com/reviews/dji-phantom-2-vision.html ”Doppler estimation” https://fr.mathworks.com/help/phased/examples/doppler-estimation.html |