РАСЧЕТ ЭЛЕКТРОПРИВОДА С ДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА НЕЗАВИСИМОГО ВОЗБУЖДЕИЯ. Курсовик. Расчет электропривода с двигателем постоянного тока независимого возбуждеия
 Скачать 239.92 Kb. Скачать 239.92 Kb.
|

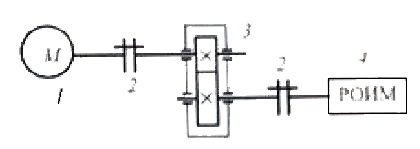
0,55  В качестве регулируемого электропривода принять привод постоянного тока индивидуального изготовления с параметрическим регулированием скорости изменением активного сопротивления в цепи обмотки якоря. Кинематическая схема электропривода имеет вид, представленный на рис. 1. Электропривод должен обеспечить следующие технологические частоты вращения рабочего органа производственного механизма и время работы с этими частотами вращения: . Выбор типа электропривода. показатель регулирования скорости (диапазон, плавность, стабильность скорости и т. д.); режим работы производственного механизма; производительность и надежность установки; основные затраты и эксплуатационные расходы на электрооборудование. Принимаем  Приближенно зависимость коэффициента ухудшения теплоотдачи от угловой скорости можно считать линейной:  = = +(1- ) +(1- ) . . =0.5+(1-0.5) =0.5+(1-0.5) = 1; = 1; =0.5+(1-0.5) =0.5+(1-0.5) = 0,66. = 0,66.где = 0.5 - коэффициент ухудшения теплоотдачи при неподвижном якоре (роторе). По нагрузочной диаграмме механизма (нагрузки отнесены к валу механизма) определяется среднеквадратичное значение мощности за время работы с помощью формулы: Pэ=  ,кВт. ,кВт.где т - число рабочих участков в цикле; Pi - мощность на i-м интервале; tpi - продолжительность i-го интервала; βi - коэффициент ухудшения теплоотдачи на i-м интервале, соответствующий значению угловой скорости  i на этом интервале: сотах - максимальная скорость производственного механизма. i на этом интервале: сотах - максимальная скорость производственного механизма.Pэ=  = = ,кВт. ,кВт. Расчетная продолжительность включения:  = =  ·100% ·100%где  − продолжительность i-го интервала времени работы в цикле; − продолжительность i-го интервала времени работы в цикле;m − число рабочих интервалов в цикле;  − продолжительность j-го интервала времени паузы в цикле; − продолжительность j-го интервала времени паузы в цикле;n − число пауз в цикл. =  ·100% = ·100% =  ·100% = 31.25% ·100% = 31.25%Каталожная продолжительность включения выбирается из ряда номинальных значений: 15 %, 25 %, 40 %, 60 %, 100 %. Среднеквадратичная мощность на ближайшую каталожную продолжительность включения:  = =  · · ,кВт. ,кВт. = · = · = 2.9· = 2.9· = 3.24 ,кВт. = 3.24 ,кВт. = · = · = 2.9· = 2.9· = 2.56 ,кВт. = 2.56 ,кВт.где  − ближайшая к расчетной каталожная продолжительность включения. − ближайшая к расчетной каталожная продолжительность включения.По полученному значению мощности и максимальной угловой скорости вращения механизма определяется расчетная мощность двигателя:  = · = · ,кВт. ,кВт. = 25% ; = 25% ;  = · = = · =  ,кВт. ,кВт. = 40% ; = 40% ;  = · = = · =  ,кВт. ,кВт.где  = 1.1− коэффициент запаса, учитывающий отличие нагрузочной = 1.1− коэффициент запаса, учитывающий отличие нагрузочнойдиаграммы двигателя от диаграммы механизма.  − коэффициент полезного действия передачи. − коэффициент полезного действия передачи.По каталогу выберем несколько электродвигателей ближайшей боль- шей мощности с различными номинальными частотами вращения.
Номинальные скорости двигателя:  = = , , ; ; = = = =  , . , . = = = =  , . , . = = = =  , . , . = = = =  , . , .Для каждого двигателя вычислим расчетное передаточное отношение (число) редуктора:  = =  ; ; = =  = =  =8.75; =8.75; = =   =9.55; =9.55; = =   =12.2; =12.2; = =   =12.5; =12.5;где  - номинальная скорость двигателя; - номинальная скорость двигателя; - максимальная скорость производственного механизма. - максимальная скорость производственного механизма.Для каждого двигателя определяется оптимальное, по условию минимизации времени пуска, передаточное отношение редуктора:  . .где  − момент инерции производственного механизма; − момент инерции производственного механизма; − момент инерции ротора двигателя; − момент инерции ротора двигателя;k = 1.05 ÷ 1.3 − коэффициент, учитывающий момент инерции редуктора. Принимаем k=1.1:  = =  =19.1; =19.1; = =  = 117.2; = 117.2; = =19.1; = =19.1; = =19.1; = =19.1;Для каждого двигателя определяется отношение выбранного стандартного передаточного отношения редуктора к оптимальному передаточному отношению:  = =  ; ; = =  = =  =0.4; =0.4; = =  = =  =0.55; =0.55; = =  = =  =0.63; =0.63; = =  = =  =0.65; =0.65;Двигатель с ɵ_i, наиболее приближенной к единице, принимается в качестве приводного. Исходя из полученных данных, для дальнейших расчетов выбираем двигатель тихоходного исполнения Д-21. ПВ=40%. Промышленность выпускает одно-, двух- и трехступенчатые редукторы с передаточным числом из стандартного ряда: 1,0; 1,12; 1,25; 1,4; 1,6; 1,8; 2,0; 2,24; 2,5; 2,8; 3,15; 3,55; 4,0; 4,5; 5,0; 5,6; 6,3; 7,1; 8,0; 9,0. Необходимое стандартное передаточное отношение редуктора можно найти следующим образом:  . .где  − стандартное передаточное число редуктора; − стандартное передаточное число редуктора; x − целое число. Стандартными передаточными отношениями являются числа: 1,12; 11,2; 112 и т. д. Стандартное передаточное отношение редуктора выбирается как ближайшее меньшее к расчетному:  ≤ ≤  . .поэтому стандартные передаточные отношения редукторов составят:  ; ;2. Построение естественных механической и электромеханических характеристик электродвигателя. Для построения электромеханической характеристики двигателя независимого возбуждения, естественной или реостатной, достаточно знать лишь две ее точки, поскольку все электромеханические характеристики теоретически представляют собой прямые линии. Эти две точки для каждой характеристики могут быть любыми, однако построение каждой из рабочих электромеханических характеристик удобно производить по точкам, одна из которых соответствует статическому току двигателя и технологической скорости, другая – скорости идеального холостого хода при токе якоря, равном нулю. Для определения статического тока необходимо рассчитать статический момент механизма, приведенный к валу двигателя.  = = = =  = 21.9 ,Н·м = 21.9 ,Н·мДля определения значения статического тока якоря двигателя выполним промежуточные вычисления. Найдем сопротивление обмотки якоря горячее при температуре двигателя, равной 75 С:  = 1,24· = 1,24· ,Ом. = 1.24· ( ,Ом. = 1.24· ( ) = 1.24· (0.531)=0.658,Ом. ) = 1.24· (0.531)=0.658,Ом.где  − сопротивление обмотки якоря двигателя при 15˚C, Ом; − сопротивление обмотки якоря двигателя при 15˚C, Ом; − сопротивление добавочных полюсов двигателя при 15˚C, Ом; − сопротивление добавочных полюсов двигателя при 15˚C, Ом;Определим номинальную скорость двигателя  = =  = =  =157, . =157, .Коэффициент ЭДС и электромагнитного момента:  = =  , , ; ;м Определим статический ток якоря двигателя  = = = =  = 16,8 ,А. = 16,8 ,А.Рассчитаем скорость идеального холостого хода =  - = - =  =169,4, . =169,4, .Определим технологические скорости вращения двигателя:  = = = =  = -150,7 , ; = -150,7 , ; = = = =  = 100,4 , ; = 100,4 , ;По расчетным значениям технологических скоростей вращения двигателя  , статическим токам якоря двигателя , статическим токам якоря двигателя  и скорости идеального холостого хода двигателя и скорости идеального холостого хода двигателя  необходимо построить электромеханические характеристики. необходимо построить электромеханические характеристики.Для двигателей постоянного тока пуск, реверс, торможение, а также регулирование скорости должно осуществляться при наложенных на ток и момент ограничениях. В электроприводах постоянного тока с релейно-контакторной схемой управления ток якоря ограничивают введением на время пуска в цепь обмотки якоря двигателя добавочных сопротивлений. Максимальный ток якоря двигателя  следует ограничить из условия удовлетворительной коммутации на коллекторе на уровне. следует ограничить из условия удовлетворительной коммутации на коллекторе на уровне. где  = 2,2 - коэффициент допустимой перегрузки двигателя по току. = 2,2 - коэффициент допустимой перегрузки двигателя по току. Найдем максимально допустимый ток якоря выбранного двигателя: = 24,5 2.2 = 53,9 А. 2.2 = 53,9 А.Порядок построения пусковых характеристик • строится первая технологическая характеристика электропривода; • строится первая пусковая электромеханическая характеристика - 3 электропривода. Характеристика 3 проходит через две точки: скорость идеального холостого хода при токе якоря, равном нулю ( ,I = 0). и допустимый ток двигателя при нулевой скорости;• определяется ток переключения  , который принимается из условия ≥ (1.1//1.2)· , который принимается из условия ≥ (1.1//1.2)· ; ;• в точке с координатами ( , ) происходит замыкание первого пускового сопротивления ) происходит замыкание первого пускового сопротивления  и двигатель переходит на вторую пусковую характеристику 4. Таким образом, характеристика 4 проходит через две точки: скорости идеального холостого хода ( 0 при токе якоря, равном нулю (I = 0), и допустимого тока и двигатель переходит на вторую пусковую характеристику 4. Таким образом, характеристика 4 проходит через две точки: скорости идеального холостого хода ( 0 при токе якоря, равном нулю (I = 0), и допустимого тока  при скорости, равной . при скорости, равной .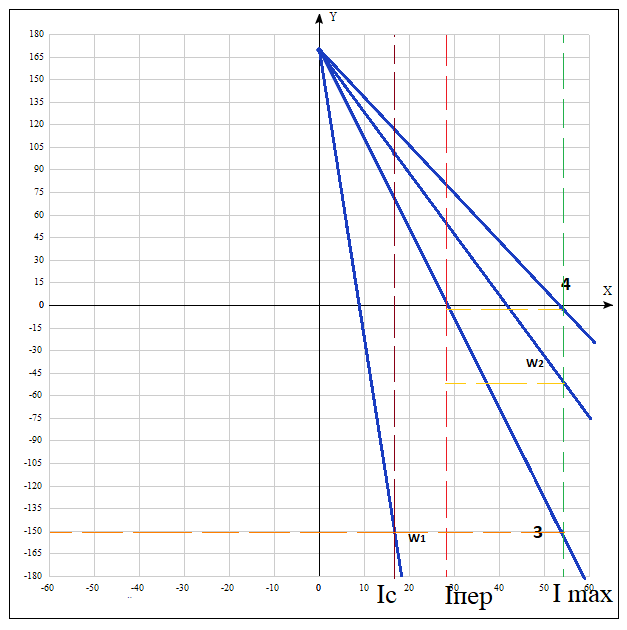 W1-первая техническая характеристика W2-вторая техническая характеристика 3-первая пусковая характеристика электропривода 4 – вторая пусковая характеристика электропривода Из уравнения электромеханической характеристики по заданным  , , и известным и известным  найдем Добавочные сопротивления найдем Добавочные сопротивления  для каждой из технологических характеристик : = для каждой из технологических характеристик : =  - ,Ом; - ,Ом; = =  - = - =  - 0.656 = 0,787, Ом; - 0.656 = 0,787, Ом; = =  - = - =  - 0.656 = 4,656 ,Ом; - 0.656 = 4,656 ,Ом;где - угловая скорость двигателя на i-ой характеристике: - статический ток двигателя на i-он характеристике.Из уравнения электромеханической характеристики по известным найдем пусковое сопротивление для первой пусковой характеристики 3 = для первой пусковой характеристики 3 =  - = - =  – 0,656 = 0,165 ,Ом. – 0,656 = 0,165 ,Ом.По известным и  найдем пусковое сопротивление найдем пусковое сопротивление для второй пусковой характеристики 4, = для второй пусковой характеристики 4, =  - = - =  - 0.656 = 1,98 ,Ом. - 0.656 = 1,98 ,Ом.Таким образом, добавочные сопротивления для технологических и пусковых характеристик найдены. 3. Динамическое торможение машины постоянного тока. Переход с первой рабочей точки во вторую рабочую точку будем осуществлять с помощью динамического торможения двигателя. Динамическое торможение осуществляется путем отключения якорной цепи двигателя от питающей сети и подключения к ней нагрузочного сопротивления. Схема динамического торможения двигателя постоянного тока независимого возбуждения приведена на рис. 4. 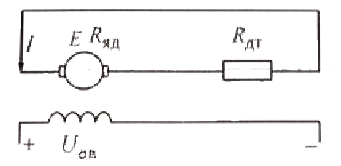 Рис. 4. Схема включения двигателя постоянного тока независимого возбуждения в режиме динамического торможения. Так как динамическое торможение должно происходить при наложенных на момент и ток двигателя ограничениях (  ), а торможение производится с технологической скорости = 90 , то выражение для расчета сопротивления динамического торможения приобретает следующий вид: ), а торможение производится с технологической скорости = 90 , то выражение для расчета сопротивления динамического торможения приобретает следующий вид: = =  - = - =  - 0.656 = 10,8 ,Ом. - 0.656 = 10,8 ,Ом.Как следует из расчетов, сопротивление динамического торможения = 10,8 ,Ом.Уравнение электромеханической характеристики электропривода в режиме динамического торможения: =  = =  = -215.46 , . = -215.46 , .где  = =  сопротивление якорной цепи двигателя в режиме динамического торможения; - сопротивление динамического торможения. сопротивление якорной цепи двигателя в режиме динамического торможения; - сопротивление динамического торможения.Заключение В данной работе был выполнен расчет двигателя постоянного тока независимого возбуждения. За основу была взята машина серии Д-21 В частности было произведено определение параметров двигателя, рассчитан номинальный электромагнитный момент двигателя, произведен расчет статистического тока якоря, также минимально допустимый ток якоря, скорость холостого хода и технологические скорости вращения двигателя. Был произведен расчет добавочных сопротивлений машины и электромеханических характеристик электропривода постоянного тока. Список использованных источников 1. Справочник по электрическим машинам: в 2 т.; под общ. ред. И. П. Ко- пылова, Б. К. Клокова. – М. : Энергоатомиздат, 1989. – 688 с. 2. Вешеневский, С. Н. Характеристики двигателей в электроприводе / С. Н. Вешеневский. – М. : Энергия, 1977. – 432 с. 3. Башарин, А. В. Примеры расчетов автоматизированного электропривода / А. В. Башарин, Ф. Н. Голубев, В. Г. Кепперман. – Л. : Энергия, 1971. – 440 с.            КР–УлГТУ–13.03.02. –2.3.09–22№ докум. Подп Изм Лист Дата Лист    |
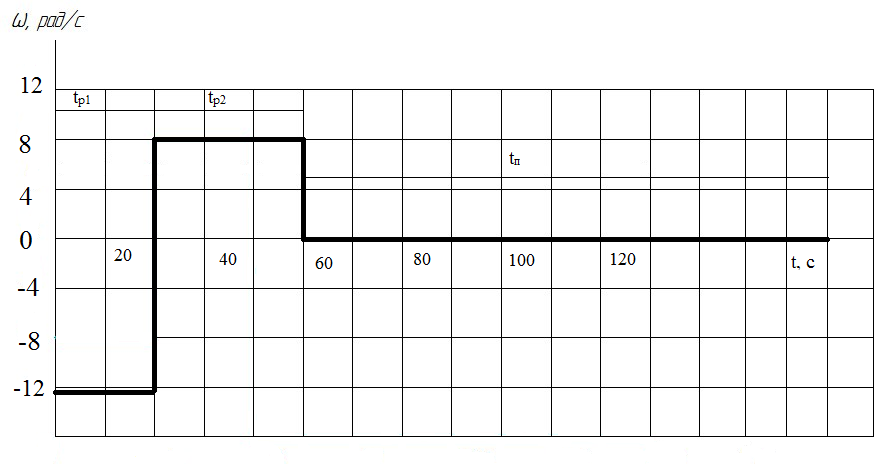
 = -120
= -120  .
. = 80
= 80  = 20 с.
= 20 с. = 30 с.
= 30 с. = 110 с.
= 110 с. .
. ,
, – частота вращения производственного механизма на i-м интервале
– частота вращения производственного механизма на i-м интервале .
. .
. =
=
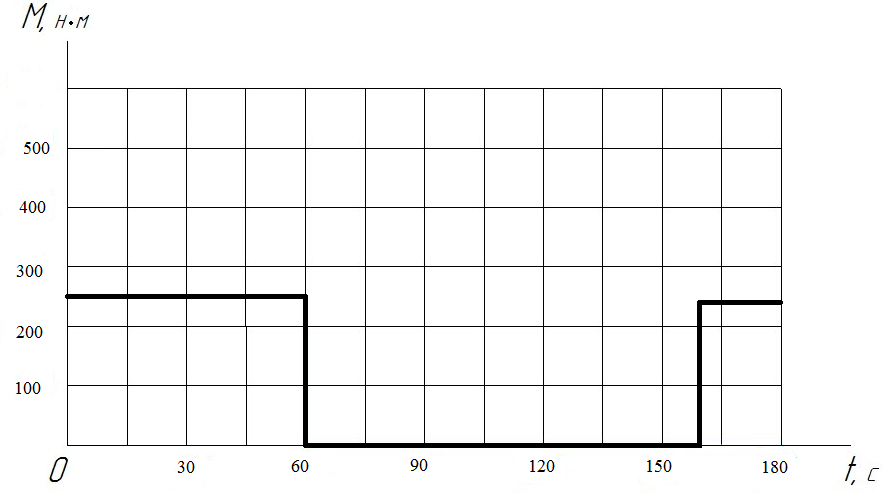
 и моментах
и моментах  производственного механизма мощность равна:
производственного механизма мощность равна: =
=  ,кВт.
,кВт. =
=  = 250
= 250 = 3.14, кВт.
= 3.14, кВт. =
=  = 250
= 250 0,45
0,45  ,кВт
,кВт
 +
+ ,Ом
,Ом ,кг·
,кг·
 ,В
,В