Пояснительная к курсовой по ТММ. Пояснительная ТММ. Расчетнопояснительная записка
 Скачать 0.58 Mb. Скачать 0.58 Mb.
|

|
4.2. Определение момента инерции курка и жесткости боевой пружины Срабатывание капсюля патрона определяется энергией, запасаемой боевой пружиной при взведении ударного механизма и временем выделения энергии или скоростью удара курка по ударнику и капсюлю. Необходимая энергия разбития капсюля является заданной величиной. Необходимое для срабатывания капсюля время передачи энергии обеспечивается скоростью движения ударника  при его ударе по капсюлю, равной 5-8 м/с. при его ударе по капсюлю, равной 5-8 м/с. где  - момент инерции курка - момент инерции курка - угловая скорость курка в момент удара по ударнику. - угловая скорость курка в момент удара по ударнику. Отсюда:  Энергия, запасаемая боевой пружиной, равна (без учета КПД ударного механизма) работе, затрачиваемой на ее сжатие:  где CБ – жесткость боевой пружины; Б.к и Б.н – деформация боевой пружины в начале и в конце взведения соответственно. Откуда следует:  Значения деформаций пружины определяются из геометрии механизма в крайних положениях:   где lБ.0, lБ.н, lБ.к – длина боевой пружины в разжатом состоянии, в начале и в конце взведения соответственно. Длину боевой пружины в разжатом состоянии можно принять равной  = 69,496 мм. = 69,496 мм.Кинематический анализ ударного механизма Целью кинематического анализа ударного механизма является расчет параметров, определяющих приведенные массы и силы: положение звена 2, передаточного отношения от курка к звену 2, расстояние от оси курка до точки его контакта со звеном 2 в процессе взведения и момента боевой пружины в функции от угла поворота курка. Для определения данных функций необходимо разбить угол поворота курка на n равных интервалов (не менее 10). Для каждого положения курка определить соответствующие ему положения звена 2 и боевой пружины. По полученным данным для каждого положения курка необходимо рассчитать: перемещение звена 2; передаточное отношение  ; расстояние от оси курка до точки его контакта со звеном 2; деформацию боевой пружины; плечо действия боевой пружины. ; расстояние от оси курка до точки его контакта со звеном 2; деформацию боевой пружины; плечо действия боевой пружины. Момент боевой пружины рассчитывается по формуле:  Результаты анализа сводим в таблицу 4.1. Таблица 4.1: Результаты кинематического анализа куркового механизма   Рисунок 4.2. Определение параметров взведения ударного механизма 5. Уточнение циклограммы работы механизмов условного образца Циклограмма отражает последовательность работы всех механизмов рассматриваемой системы (рис. 5.1), порядок их включения и выключения в зависимости от положения ведущего звена автоматики. При построении циклограммы следует уточнить значения перемещения ведущего звена 1 в характерные моменты включения и выключения механизмов автоматики: - в крайнем заднем положении  ; ;- в начала и в конце работы ускорителя  , ,  ; ;- в начале и в конце сжатия возвратного механизма  , ,  ; ;- в начале и в конце взведения курка  , ,  ; ;- в начале и в конце работы механизма подачи ленты  , ,  . .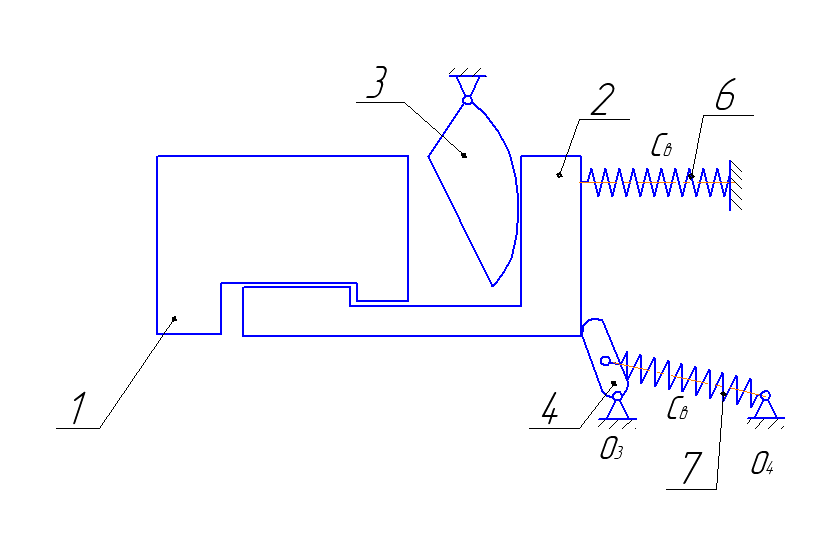 Рис. 5.1. Кинематическая схема механизма В настоящем проекте величины , , являются заданными: , , . .Величина определяется при проектировании ускорителя:Х1.у.к = Х1.у.н + ∆Х1у = 25 + 20 = 45 мм. Начало движения курка соответствует началу движения звена 2, т.е. началу работы ускорителя: Х1.к.н = 25 мм. Для определения конца взведения ударного механизма, необходимо построить зависимость  на всей длине отката. на всей длине отката.Данную зависимость целесообразно представить в табличном и графическом виде (табл. 5.1, рис. 5.2). Таблица 5.1: Табличная зависимость  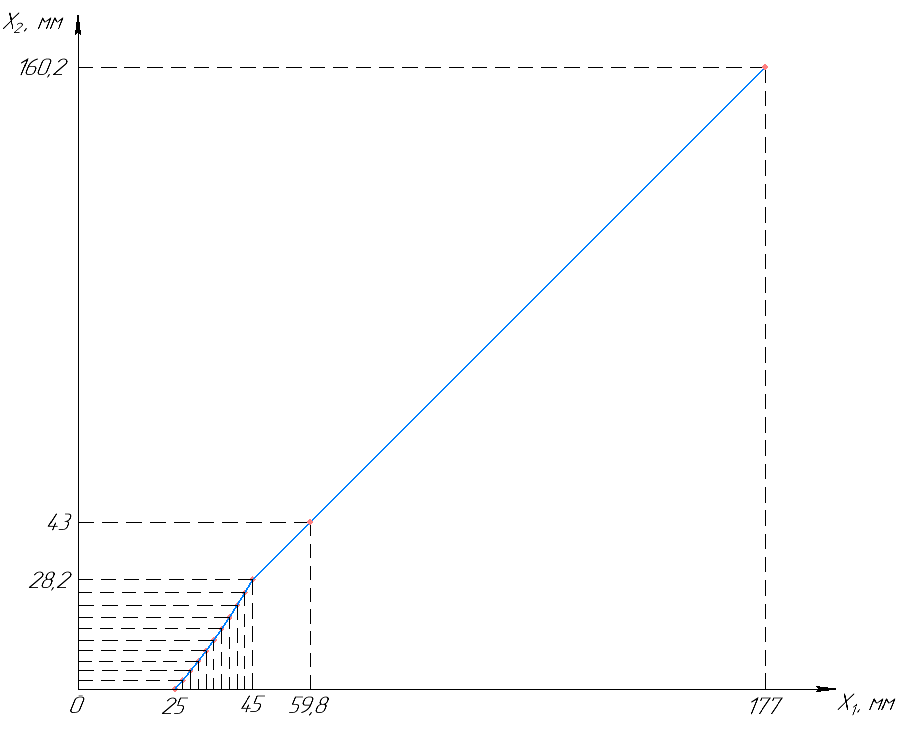 Рис. 5.2. График зависимости Из графика величина перемещения ведущего звена до момента взведения курка составляет:  . .Полученная циклограмма работы автоматики рассматриваемого механизма представлена в рис. 5.3.  Рис. 5.3: Циклограмма работы автоматики 6. Подготовка данных для динамического анализа Целью динамического исследования является определение скоростей и ускорений ведущего звена на всем участке его движения. В практике инженерных расчетов, связанных с анализом и синтезом автоматического оружия, сложная динамическая система механизмов оружия, в которой массы подвижных звеньев перемещаются каждая по своему закону, заменяется одной условной приведенной массой  звена приведения (ведущего звена), на которое действует приведенная сила звена приведения (ведущего звена), на которое действует приведенная сила  . Параметры движения ведомых звеньев при необходимости определяются по параметрам движения ведущего звена и соответствующим передаточным числам. . Параметры движения ведомых звеньев при необходимости определяются по параметрам движения ведущего звена и соответствующим передаточным числам. При идеальных связях в механизме (без учета КПД) условием приведения масс является равенство кинетической энергии звена приведения сумме кинетических энергий всех движущихся звеньев системы. Для поступательно движущегося ведущего звена:  где MВед – масса ведущего вена; Mi – масса i-го ведомого звена, движущегося поступательно; Jj – момент инерции относительно оси вращения j-го ведомого звена, имеющего вращательное движение; ii – передаточное отношение от i-го поступательно движущегося звена к звену приведения; ij – передаточное отношение от j-го вращающегося звена к звену приведения; rj – расстояние от оси вращения j-го звена до точки приведения массы. При идеальных связях в механизме (без учета КПД) условием приведения сил (моментов сил) является равенство элементарной работы (мощности) приведенной силы (приведенного момента сил) сумме элементарных работ (мощностей) всех действующих на подвижные звенья сил на возможных перемещениях точек их приложения. Для поступательно движущегося ведущего звена:  где FВед – сумма сил, приложенных к ведущему звену; Fi – силы, приложенные к ведомым звеньям; Mj – моменты сил, приложенные к ведомым звеньям. В соответствие с конструкцией механизмов и принятых ранее допущений будем иметь в общем случае: - для приведенной массы:  - для приведенной силы:  Расчет приведенных масс на участках циклограммы. Участок свободного хода (0…Х1ун): 0…25 мм. Мпр. = М1 = 0,61 кг. Работа ускорительного механизма (Х1ун…Х1ук): 25…45 мм. т. Х1ун = 25 мм  т. Х1ун < Хi ≤ Х1ук 25 < Хi ≤ 45  Хi = 28,333 мм:  Хi = 31,667 мм:  Хi = 35 мм:  Хi = 38,333 мм:  Хi = 41,667 мм:  Х1ук = 45 мм (1):  Х1ук = 45 мм (2):   Взведение курка (Х1ук…Х1кк): 45…59,8 мм. т. Х1ук < Хi < Х1кк 45 < Хi < 59,8 Хi = 47,467 мм:  Хi = 49,933 мм:  Хi = 52,4 мм:  Хi = 54,867 мм:  Хi = 57,333 мм:  Х1кк = 59,8 мм (1):  Х1кк = 59,8 мм (2):  Оставшийся участок отката ведущего звена.  Расчет приведенных сил сопротивления на участках циклограммы. Участок свободного хода (0…Х1ун): 0…22 мм. Fпр = 0. Работа ускорительного механизма (Х1ун…Х1ук): 22…47 мм. т. Х1ун = 25 мм:    , ,  . . т. Х1ун < Хi ≤ Х1ук < Хi ≤ 45 Хi = 28,333 мм:  , ,  . . Хi = 31,667 мм:  , ,  . . Хi = 35 мм:  , ,  . . Хi = 38,333 мм:  , ,  . . Хi = 41,667 мм:  , ,  . . Х1ук = 45 мм (1):  , ,  . . Х1ук = 45 мм (2):  Взведение курка (Х1ук…Х1кк): 45 … 59,8мм. Х1ук < Хi < Х1кк 45 < Хi < 59,8  Хi = 47,467 мм:  , ,  . . |