Пояснительная к курсовой по ТММ. пз. Расчетнопояснительная записка
 Скачать 0.5 Mb. Скачать 0.5 Mb.
|

|
Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования «Ижевский государственный технический университет» имени М.Т. Калашникова Кафедра “Стрелковое оружие” РАСЧЕТНО-ПОЯСНИТЕЛЬНАЯ ЗАПИСКА к курсовому проекту по ТММ Вариант № 11.20.19.02.01 Руководитель проекта старший преподаватель Фёдорова Е.А. Выполнил студент гр Ижевск, 2021 Содержание Введение 3 1. Задание к курсовому проекту 4 2. Исследование рычажного механизма подачи патронной ленты 5 2.1. Метрический синтез рычажного механизма перемещения ленты 5 2.2. Кинематическое исследование рычажного механизма перемещения ленты 5 3. Построение профиля кулачка ускорительного механизма 7 4. Проектирование ударного куркового механизма 11 4.1. Метрический синтез ударного механизма 12 4.2. Определение момента инерции курка и жесткости боевой пружины 13 4.3. Кинематический анализ ударного механизма 14 5. Уточнение циклограммы работы механизмов условного образца 16 6. Подготовка данных для динамического анализа 18 7. Решение уравнения движения для периода действия пороховых газов 22 8. Решение уравнения движения для периода сил сопротивления 24 Заключение 28 Список использованной литературы 29 1. Введение Одной из повседневных задач в практике инженера-механика является проектирование и исследование различных механизмов. Основной дисциплиной, изучающей методы исследования и проектирование механизмов, является курс “Теория машин и механизмов”. Это базовый курс исследующего изучения общеинженерных и специальных дисциплин, для более глубокого изучения, которого студенты выполняют курсовой проект, где студенты проектируют и исследуют реальные механизмы автоматических машин. Навыки, приобретенные при выполнении проекта, применяются в дальнейшем при изучении специальных дисциплин и выполнении курсового проекта, который включает в себя следующие разделы курса: -кинематический анализ рычажных и кулачковых механизмов их синтез; -исследование движения звеньев механизмов под действием приложенных к ним сил. 1.2 Задание к курсовому проекту Вариант № 11.20.19.02.01 Общая кинематическая схема привода  Рис. 1.1. 1-затвор, 2-затворная рама, 3-ускоритель, 4-курок, 5-ползун, 6-взвратная пружина,7-боевая пружина, 8-ствол, 9-ствольная коробка, 10,11,12,13,14 -передаточные рычаги. Таблица 1.1 Параметры ускорительного механизма
Таблица 1.2 Параметры механизма подачи
Таблица 1.3 Параметры ударного механизма
Таблица 1.4 Параметры действия пороховых газов
Таблица 1.5 Массово-силовые характеристики механизмов
2. Исследование рычажного механизма подачи патронной ленты 2.1. Метрический синтез рычажного механизма перемещения ленты Задачей синтеза в настоящем курсовом проекте является построение рычажного механизма по двум крайним положениям ведомого и ведущего звеньев. Рассмотрим построение механизма. Для его проектирования задана кинематическая схема и величины перемещений hп=30 мм – ведущего ролика рычага 10 и Sп=13 мм – звена, осуществляющего перемещение ленты. По этим данным, а также по габаритному размеру механизма lг=127 мм, необходимо найти длины рычагов и положения осей вращения всех звеньев. Результат построения рычажного механизма представлен на рис.2.1. 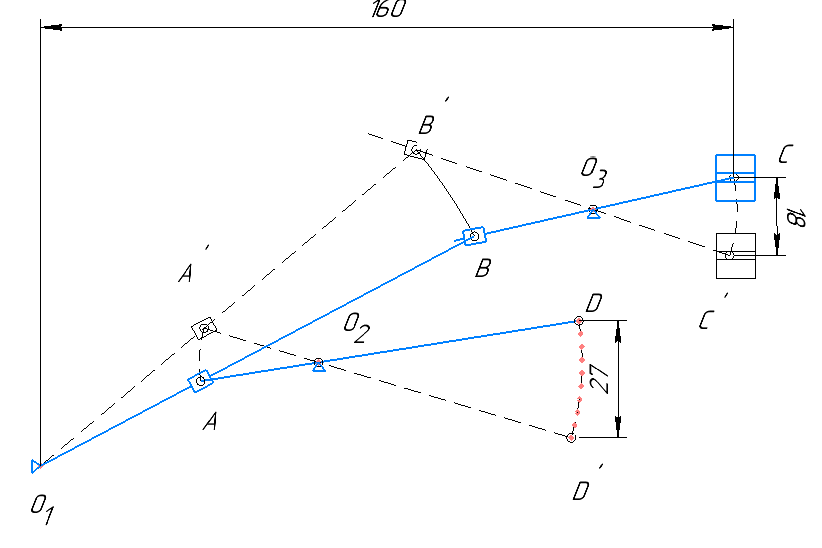 Рис. 2.1. Синтез рычажного механизма 2.2. Кинематическое исследование рычажного механизма перемещения ленты Целями кинематического исследования механизма подачи патронной ленты в курсовом проекте является контроль правильности проектирования, заключающийся в определении фактической зависимости передаточного отношения  . .Определять передаточные отношения будем графическим методом через построение планов скоростей. 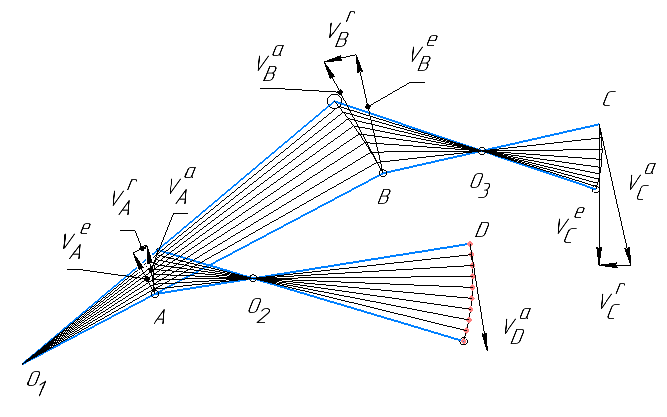 Рис. 2.2. Пример построения скоростей Из точки D проводим вектор произвольной длинны перпендикулярный звену O2D. Этот вектор является абсолютной скоростью точки D. Далее из точки А проводим перпендикуляр к O2D, это будет вектор абсолютной скорости точки А, длина этого вектора определяется из соотношения О2А/О2D=  / / . Переносная скорость точки A направленна перпендикулярно O1D. Относительная скорость точки A направлена параллельно O1A. Абсолютная скорость точки B перпендикулярна O1B и равна . Переносная скорость точки A направленна перпендикулярно O1D. Относительная скорость точки A направлена параллельно O1A. Абсолютная скорость точки B перпендикулярна O1B и равна  . Переносная скорость точи В перпендикулярна O3B. Относительная скорость точки В параллельна O3B. Абсолютная скорость точки C перпендикулярна O3C и равна . Переносная скорость точи В перпендикулярна O3B. Относительная скорость точки В параллельна O3B. Абсолютная скорость точки C перпендикулярна O3C и равна  . Переносная скорость точки C направлена вдоль движения ползуна. Относительная скорость точки C перпендикулярна оси ползуна. . Переносная скорость точки C направлена вдоль движения ползуна. Относительная скорость точки C перпендикулярна оси ползуна.Для других положений скорости строим аналогично. Планы скоростей механизма для 11 положением приведены на рис. 2.3. 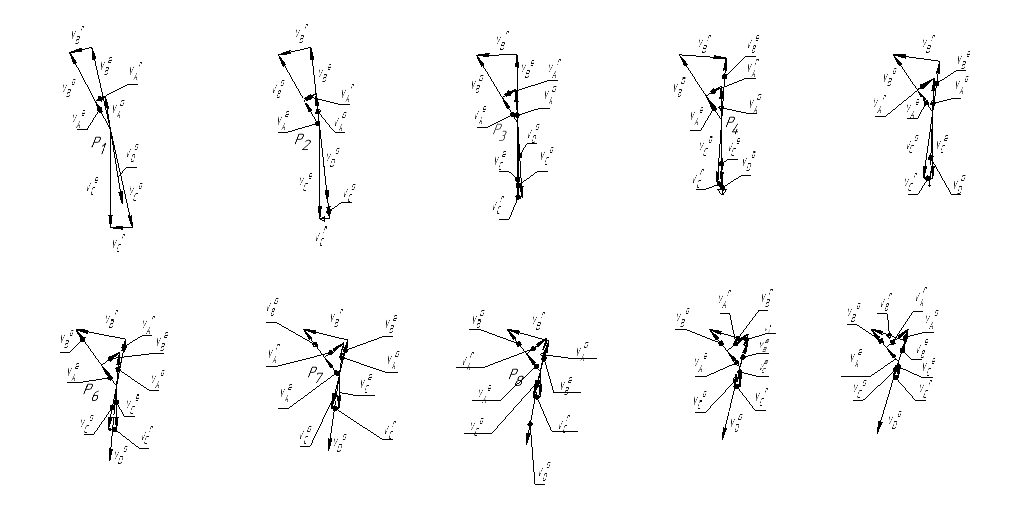 Рис. 2.3. Построение планов скоростей 3. Построение профиля кулачка ускорительного механизма Рычажно-кулачковые ускорительные механизмы, подобные рассматриваемому в курсовом проекте, применяются в системах оружия с полусвободным затвором и с коротким ходом ствола. Как правило, это сложное устройство, имеющее до четырех кулачковых профилей. Такие кулачки осуществляют плавное ускорение ведомого звена по заданному закону, и обеспечивают достаточно широкий диапазон скоростей ведомого звена в конце работы ускорителя. В курсовом проекте проектируемый кулачок имеет лишь одну рабочую поверхность. По геометрическим соображениям:  Рассмотрим проектирование ускорительного механизма по порядку: Расположим на чертеже звено 1 и ось вращения О, задавшись радиусом r1=40 мм и начальным углом αо=120о. Выбираем участок работы ускорителя, т.е. перемещения звена 1 при работе ускорителя. Эта величина выбирается по конструктивным соображениям и может приниматься близкой к первоначальному расстоянию от звена 1 до оси кулачка, т.е.: ∆Х1у ≤ r1∙|cos αo| = 40∙cos120o = 20 мм. 3. Определяем закон движения звена 2 относительно звена 1, графически интегрируя заданную зависимость  (рис. 3.1). (рис. 3.1). 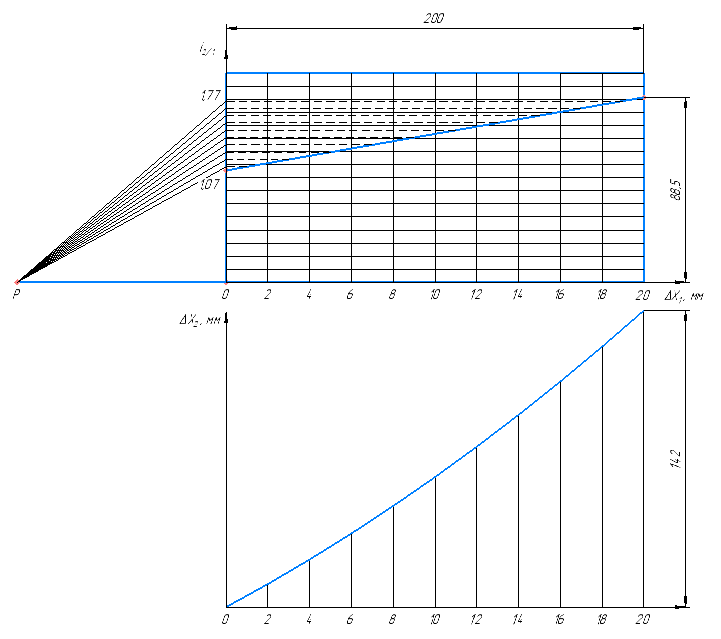 Рис. 3.1. Графическое интегрирование Составляем рабочую таблицу для построения профиля ускорителя: Масштаб графика  по оси по оси  : : Масштаб графика  по оси по оси  : : Масштаб графика по оси  : : 4. Зададимся углом  и по формуле: и по формуле: По известному передаточному отношению  в начале работы ускорительного механизма, определим в начале работы ускорительного механизма, определим  : : После чего находим расстояние от оси вращения ускорителя до рабочей поверхности звена В:   При выборе β0 следует ориентироваться на то, что при увеличении угла β0 возрастает величина r2.0, а в дальнейшем r2 и габариты кулачка. 5. Определяем промежуточные и конечное положение звена 2 на участке работы ускорителя. Для этого от первоначального положения звена 2 в сторону его движения откладываем отрезки пути, определяя таким образом координаты точек В контакта кулачка со звеном 2:  6. Следующим шагом является определение координат у точек В контакта кулачка со звеном 2:   где i=1…n. 7. От направлений радиусов  откладываем углы поворота кулачка в сторону, противоположную вращению. На полученных лучах откладываем величины . м откладываем углы поворота кулачка в сторону, противоположную вращению. На полученных лучах откладываем величины . м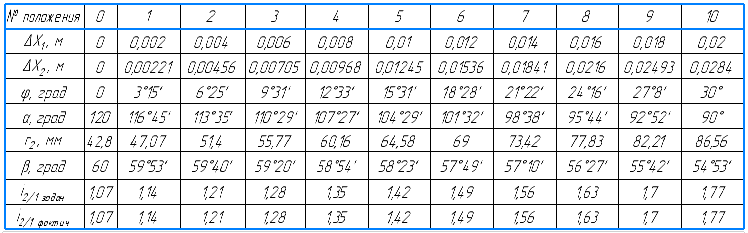 Таблица 3.1: Сводные данные для построения профиля ускорителя 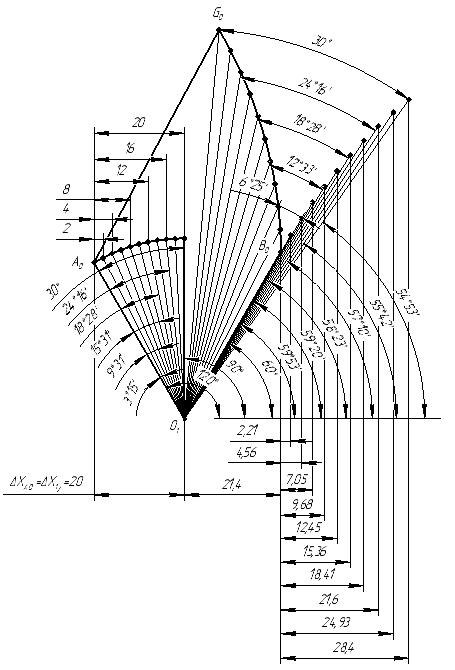 Рис. 3.2. Графическая проработка работоспособности кулачка Правильность построения кулачка проверим двумя способами: прямым расчетом передаточного отношения в начальном, конечном и промежуточных положениях и сравнением с заданными значениями (табл. 3.1). Прорисовкой кулачка совместно с взаимодействующей с ним поверхностью звена 2 в начальном, конечном и промежуточных положениях (рис. 3.3). 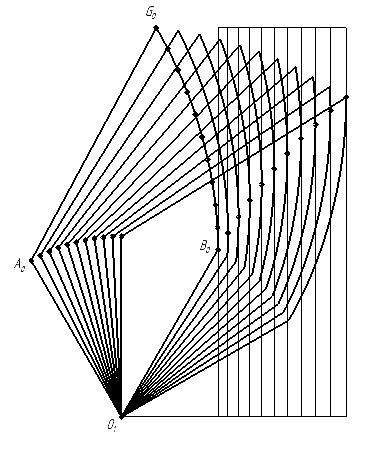 Рис. 3.3. Графическая проработка работоспособности кулачка. 4. Проектирование ударного куркового механизма Ударный механизм предназначен для разбития капсюля-воспламенителя и состоит из следующих основных частей: бойка – детали, непосредственно ударяющей по капсюлю-воспламенителю; боевой пружины – носителя энергии; курка – вращающейся детали, передающей энергию боевой пружины бойку посредством удара; некоторых дополнительных деталей, необязательных для всей конструкции. В схеме с полусвободным затвором, энергия от курка передается через заднюю часть затвора, посредством удара по ней, а затем путем непосредственного соприкосновения с передней частью затвора. |






















