шпора термех. Равнодействующая системы параллельных сил равна
 Скачать 1.02 Mb. Скачать 1.02 Mb.
|

|
Неверным является следующее утверждение … Утверждение, что импульсы ударной силы, действующей на тело 1, в первой фазе удара и во второй фазе удара одинаковы по величине неверно. Импульсы будут одинаковы только в том случае, если удар – абсолютно-упругий. 51. Удару соответствуют временные зависимости количества движения таких систем, как … Количество движения механической системы при ударе изменяется мгновенным скачком, равным геометрической сумме внешних ударных импульсов.   52.  Материальная точка ударяется о неподвижное основание и отскакивает (см. рис.). Скорость точки до удара равна 5 м/с и образует с нормалью к поверхности угол = 36°52' (угол падения). Скорость точки после удара равна 4 м/с. Коэффициент k восстановления при ударе равен 0,3. Трением пренебрегаем. Угол отражения после удара равен …  Если до удара скорость центра масс тела равна v, после удара – u, то теорема об изменении количества движения системы в проекциях на нормаль и касательную будет иметь вид  и и 53. 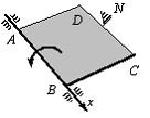 Вращаясь вокруг оси Ах с угловой скоростью 6 рад/с, квадратная пластина ABCD наталкивается на неподвижное препятствие в точке N и после удара останавливается (см. рис.). Масса пластины 20 кг, длина стороны АВ = ВC = 0,5 м. Момент импульса ударной реакции в точке Nотносительно оси Ах по модулю равен ____ Нсм. Момент инерции пластины относительно оси Ах равен  Кинетический момент системы в начальный момент времени равен Кинетический момент системы в начальный момент времени равенПосле удара Теорема об изменении кинетического момента системы при ударе Тогда момент импульса ударной реакции в точке Nравен  54. 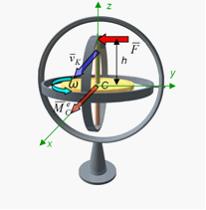 Второе свойство гироскопа: … Второе свойство гироскопа: при действии силы (или пары сил) на ось быстро вращающегося гироскопа она будет отклоняться не в сторону действия силы, как это было бы при невращающемся роторе, а в направлении, перпендикулярном этой силе. Данное свойство наблюдается как у астатического, так и тяжелого гироскопа. 55.  Пусть даны неподвижные Сх, Су и Сz и подвижные оси Ch, Cx и Cz (главные центральные оси инерции вращающегося вокруг т.С твердого тела), – орты подвижной системы координат Ch, Cx и Cz.Примем: – проекция главного момента внешних сил на ось l, – осевой момент инерции тела, –кинетический момент тела, – угловая скорость тела относительно некоторой оси l.Обозначим углы Эйлера: j − угол вращения, q − угол нутации, y − угол прецессии. Тогда формулы Пуассона будут … Поскольку производная от вектора постоянной длины равна векторному произведению угловой скорости на сам вектор, формулы Пуассона получаются в виде 56.  Оси Ох, Оу и Оz являются неподвижными осями координат; оси Ch, Cx и Cz – главными осями инерции твердого тела, оси Cx1, Cy1 и Cz1 – осями Кенига (см. рис.). Пусть СК – линия узлов, т. С – полюс. Тогда уравнения движения свободного твердого тела включают в себя … Элементарное движение свободного твердого тела складывается из поступательного вместе с полюсом С: 57.  Гироскоп (см. рис.) весом G = 10 Н вращается с угловой скоростью По теореме Резаля скорость конца вектора кинетического момента механической системы относительно некоторого неподвижного центра Огеометрически равна главному моменту внешних сил, действующих на эту систему, относительно того же центра: То есть действие постоянной внешней силы на ось гироскопа приводит к повороту этой оси с некоторой угловой скоростью (остальные внешние силы – реакции связей приложены к неподвижной точке О). По формуле Эйлера для скорости получаем С учетом равенства из теоремы Резаля находим  58.  Для приведенного графика движения упругой колебательной системы с одной степенью свободы (q – обобщенная координата, t – время, начальные условия , ) дифференциальное уравнение движения имеет вид … Указанный график соответствует свободным колебаниям системы при наличии линейного сопротивления. Дифференциальное уравнение таких затухающих колебаний имеет вид 59.  Механическая система совершает колебания (см. рис.), описываемые законом Представлен график и закон свободных колебаний вида  60.  Консервативная механическая система с одной степенью свободы имеет устойчивое положение равновесия при значении обобщенной координаты В положении равновесия значение потенциальной энергии Тогда функция, определяющая потенциальную энергию, может иметь вид … Необходимое условие равновесия системы с одной степенью свободы  Достаточные условия устойчивости положений равновесия для консервативных систем определяются теоремой Лагранжа – Дирихле: положение равновесия консервативной механической системы устойчиво, если в положении равновесия потенциальная энергия системы имеет изолированный минимум. Достаточные условия устойчивости положений равновесия для консервативных систем определяются теоремой Лагранжа – Дирихле: положение равновесия консервативной механической системы устойчиво, если в положении равновесия потенциальная энергия системы имеет изолированный минимум.Потенциальная энергия механической системы определяется с точностью до постоянной. Выберем эту постоянную так, чтобы в положении равновесия потенциальная энергия равнялась нулю П(0) = 0. Тогда для системы с одной степенью свободы достаточным условием существования изолированного минимума будет условие  Рассмотрим выражение   Ответ: Ответ: 61.  Механическая система (см. рис.) состоит из невесомой трубки, имеющей в т. О горизонтальную ось вращения, и шарика массой m, который перемещается по трубке без трения и связан с точкой O трубки пружиной. Пусть длина недеформированной пружины а, жесткость пружины c. Координата х положения шарика на трубке отсчитывается от т. О, угол j – от вертикальной оси.Устойчивым будет равновесие при … Если механическая система находится в равновесии в потенциальном силовом поле, то из уравнений Лагранжа 2-го рода получаем необходимые условия равновесия:  , j =1, 2, …, s, где qj – j-ая обобщенная координата; s– число обобщенных координат в механической системе. , j =1, 2, …, s, где qj – j-ая обобщенная координата; s– число обобщенных координат в механической системе.Следовательно, в положении равновесия потенциальная энергия имеет экстремальное значение. Не всякое равновесие может быть реализовано практически. В зависимости от поведения системы при отклонении от положения равновесия говорят об устойчивости или неустойчивости данного положения. Достаточные условия устойчивости положений равновесия для таких систем определяются теоремой Лагранжа – Дирихле:положение равновесия консервативной механической системы устойчиво, если в положении равновесия потенциальная энергия системы имеет изолированный минимум. Для системы с двумя степенями свободы достаточными условиями существования изолированного минимума будут, согласно критериям Сильвестра, неравенства  и и  Потенциальная энергия системы  Пусть Тогда    Условиям Условиям   и и  соответствует положение равновесия при соответствует положение равновесия при 62. |