ФокинА_1РГР. Равновесие механической системы
 Скачать 0.63 Mb. Скачать 0.63 Mb.
|

|
Расчетно-графическое задание по статике РГР-1 РАВНОВЕСИЕ МЕХАНИЧЕСКОЙ СИСТЕМЫ Группа Студент Фокин А. Оценка работы Дата Преподаватель МОСКВА 2014г. ЗАДАНИЕ Определить реакции в точках А, В, С и характер изменения этих реакций в зависимости от направления действия силы Р1 (угла Р). Весом балок и трением в шарнирах пренебречь. По варианту задания выбрана схема № 22 из приложения 1 и строка с исходными данными № 1 из таблицы приложения 2. Решение Рассмотрим схему, представленную на рисунке 1. Механическая система состоит из балок АС и ВС, соединённых между собой цилиндрическим шарниром С. В точке А балка СА закрепляется под углом 900 к стенке с помощью жёсткой заделки, в точке В – шарнирная подвижная опора N1-N2. Система нагружена равномерно распределённой нагрузкой интенсивностью q, силой с моментом М, силой Р1, приложенной к балке АС под углом β. Необходимо определить реакции в точках А, В, С и характер изменения этих реакций в зависимости от направления действия силы Р1 (угла β). Весом балок и трением в шарнирах пренебречь. Вариант задания № 1
Определить: Rax(β), Ray (β), Ra (β), Rcx (β), Rcy (β), RC(β), RB(β), MA(β). 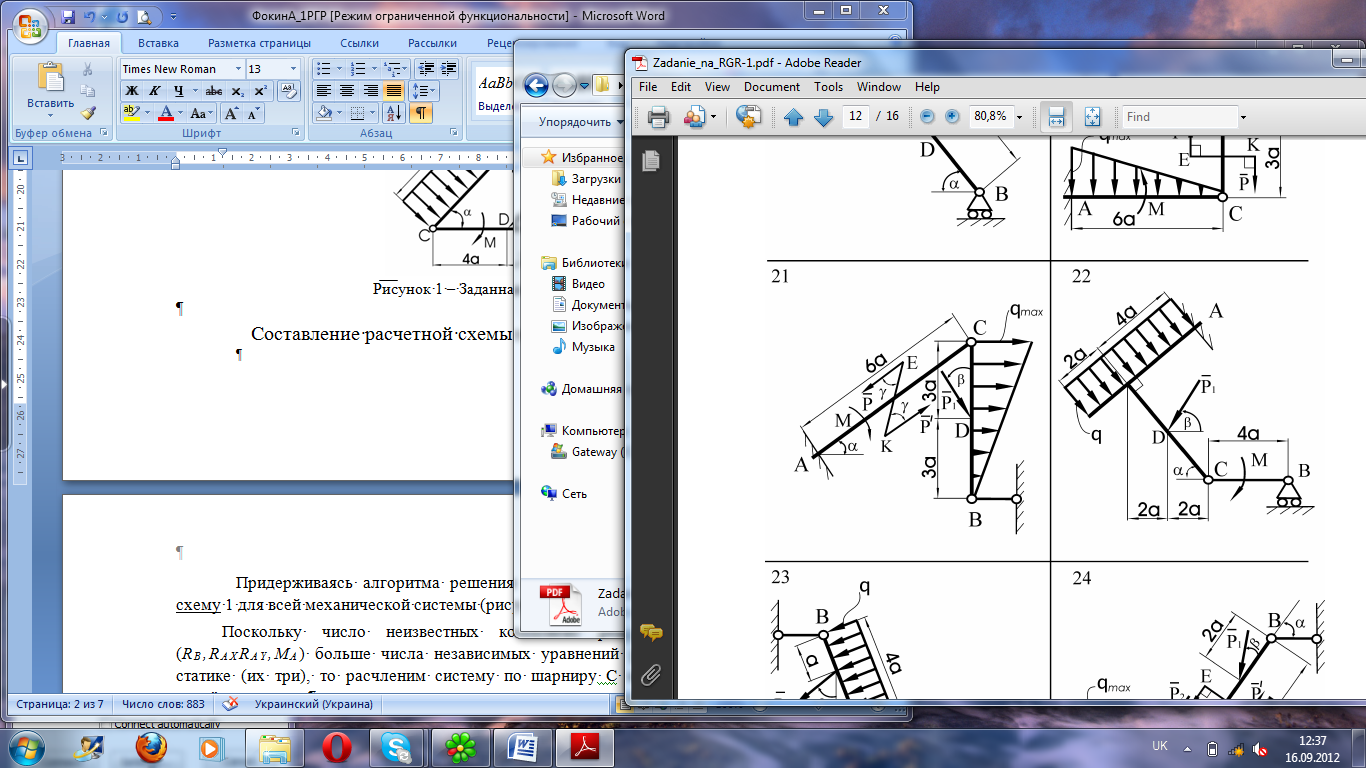 Рисунок 1 – Заданная схема № 22 Составление расчетной схемы и уравнений равновесия Придерживаясь алгоритма решения задач статики, составим расчетную схему 1 для всей механической системы (рисунок 2). Поскольку число неизвестных компонент реакций в этой схеме (RB,RAXRAY,MA) больше числа независимых уравнений равновесия в плоской статике (их три), то расчленим систему по шарниру С и составим две новые расчётные схемы. Для каждой схемы определим систему сил и моментов, для которой выполняется система уравнений равновесия: ∑ FKX = 0, ∑ FKY = 0, ∑  МC( Fk) = 0. МC( Fk) = 0.Моменты всех сил будем находить по теореме Вариньона, т.е. находить моменты для проекций этих сил на оси ОХ и ОY прямоугольной декартовой системы координат (расположение осей – традиционное). Расчётная схема 2 (балка АС) показана на рисунке 3.  Y A   MA RAX   Q     RAY  Р1    C X  RCX RCY Рисунок 3 – Расчетная схема 2 Для балки АС: активные силовые факторы, действующие на балку АС: равномерно распределённую нагрузку интенсивностью qзаменяем сосредоточенной силой Q(модуль силы Qравен Q= lq, где l– плечо под нагрузкой, точка приложения силы Q- точка О); момент силы Q относительно т. С; сила Р1; 2) связи: в точке А - жёсткая заделка, реакция состоит из силы реакции (направление её заранее неизвестно, поэтому силу раскладываем на составляющие RAX,RAY) и моментом Ма; в точке С – цилиндрический шарнир, составляющие реакции которого R'Cx, R'Cy(рис 4). 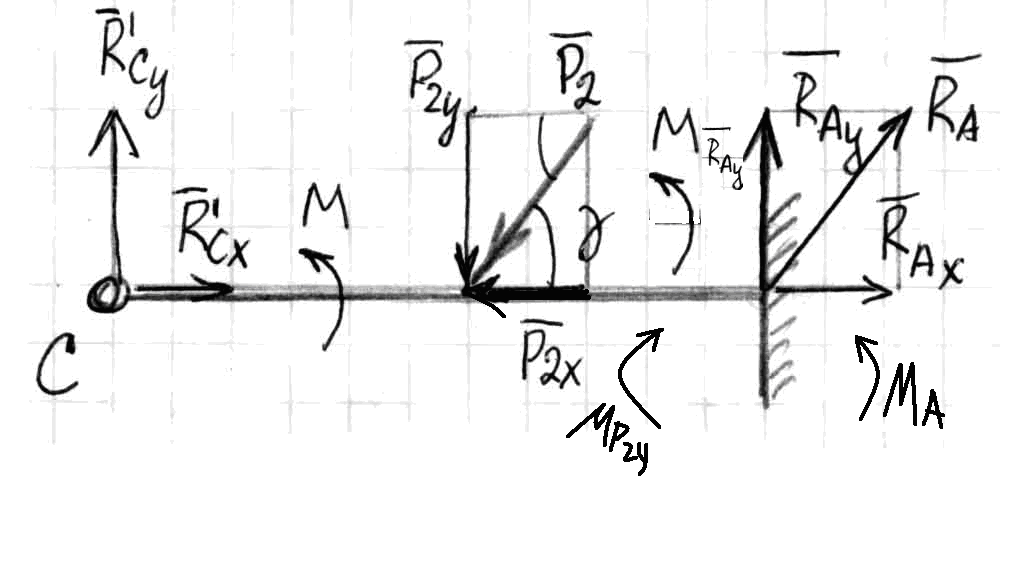 Уравнения равновесия для схемы 3 - АС: ∑ FKX= -P1X- RCX- RAX +QX=- P1 sin(α+β) - RCX- RAX + 6qa*cosα = 0, ∑ FKY= -QY -P1Y -RCY- RAY = - 6qa*sinα - P1cos(α+β) -RCY- RAY = 0, ∑ MC(Fk) = MQX + MP1Y- MP1X+ MQY + MA = = MA – P16asin(α+β) + P16acos(α+β) + 3aQcosα+3aQsinα = 0. Y RCY M RB       C X B RCX Рисунок 3 – Расчетная схема 2 Для балки ВС: активные силовые факторы: момент М; 2) связи: в точке В – шарнирная подвижная опора, реакция опоры направлена вверх; в точке С – цилиндрический шарнир, составляющие реакции которого RCx, RCy(рис 4) Уравнения равновесия для схемы 2 - BC (см. рис. 4): ∑ FKX=RCX =0, ∑ FKY = RCY +RB =0, ∑ MC(Fk) = –M -4aRB= 0.Решение системы уравнений Перепишем систему уравнений, принимая во внимание, что R'CX=RCXи R'CY=RCY(модули этих сил равны) и учитывая, что P1X= P1sin(α+β), P1Y=P1cos(α+β), Qx=Qcosα, Qy=Qsinα. Тогда имеем систему 6 уравнений : RCX =0, RCY +RB =0, –M -4aRB= 0. - P1 sin(α+β) - RCX- RAX + 6qa*cosα = 0, - 6qa*sinα - P1 cos(α+β) -RCY - RAY = 0, MA – P16asin(α+β) + P16acos(α+β) + 3aq*cosα+3aq*sinα = 0. После преобразований из уравнений (1), (3) получаем RCX= 0 RAX=- P1 sin(α+β) - RCX+ 6qa*cosα RCY = - RB RAY =- 6qa*sinα - P1 cos(α+β) -RCY MA = P16asin(α+β) - P16acos(α+β) - 3aq*cosα - 3aq*sinα RB = -М/4а Полученные выражения представляют собой расчетные формулы, у которых в правой части равенства – заданные параметры (с учетом Q∙= 6q∙a), а в левой – искомые величины. Результаты расчетов Подсчет значений величин по полученным формулам проводим на компьютере в MS Excel. Результаты расчетов сведены в таблицу 1, а их графическое представление приведено на рис.5. Оценка величины реакции RA и RC приведена по формулам: Исходные данные для расчета.
Таблица 1
По табличным данным были построим графики искомых параметров. По оси ОХ откладываются номера значений угла β (значения от 0 до 360 градусов). График1 –Зависимость значений момента MA от угла β  График 2 –Зависимости значений реакций и момента MA от угла β  Рисунок 5 Ряд1 – Rax Ряд2 – Ray Ряд3 – Rcx Ряд4 – Rcy Ряд5 – Rb | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||