Электрический привод. Привод Вариант 6. Разработать электропривод производственного механизма, удовлетворяющего следующим техническим условиям и требованиям
 Скачать 0.62 Mb. Скачать 0.62 Mb.
|

Оглавление1.1 Расчёт мощности электродвигателя. 7 1.2 Построение естественных механической и электромеханических характеристик электродвигателя 8 1.3 Расчёт переходных процессов скорости, момента и тока за один цикл работы привода. 18 Задание на выполнение курсового проектированияТема: Разработать электропривод производственного механизма, удовлетворяющего следующим техническим условиям и требованиям: В качестве регулируемого электропривода принять привод постоянного тока с регулированием скорости изменением активного сопротивления в цепи обмотки якоря. Необходимо предусмотреть возможность запуска двигателя в несколько ступеней и остановку электрическим торможением. Запуск двигателя производится под нагрузкой Р1, затем следует работа на естественной характеристике под нагрузкой в соответствии с графиком P(t). Торможение двигателя осуществляется на холостом ходу, причем двигатель переключается на тормозной режим сразу после окончания последней ступени нагрузки. Момент инерции механизма J  , приведенный к валу двигателя, принимается равным 2Jдв. , приведенный к валу двигателя, принимается равным 2Jдв.ВведениеАвтоматизированные электроприводы в настоящее время — это сложные динамические системы, которые включают в себя разные линейные и нелинейные составные элементы, обеспечивающие при взаимодействии самые разнообразные как статические, так и динамические характеристики. Электродвигатели постоянного тока применяются в прецизионных приводах, для которых нужно плавное регулирование частоты вращения в самом широком диапазоне. Нужные свойства двигателей и генераторов постоянного тока, определяются способом возбуждения и схемой включения обмоток возбуждения. По способу возбуждения двигатели постоянного тока делятся на двигатели с электромагнитным и магнитоэлектрическим возбуждением. Все электродвигатели с электромагнитным возбуждением подразделяются на двигатели с параллельным, последовательным, смешанным и независимым возбуждением. Электрические машины постоянного тока обратимы, то есть, возможна их работа в качестве двигателей либо генераторов. Например, если в системе управления с использованием генератора в обратной связи отсоединить генератор от первичного двигателя и подвести напряжение к обмоткам якоря и возбуждения, то якорь начнет вращаться, и машина будет работать как двигатель постоянного тока, преобразуя электрическую энергию в механическую. Двигатели независимого возбуждения наиболее полно удовлетворяют основным требованиям к исполнительным двигателям самоторможение двигателя при снятии сигнала управления, широкий диапазон регулирования частоты вращения, линейность механических и регулировочных характеристик, устойчивость работы во всем диапазоне вращения, малая мощность управления, высокое быстродействие, малые габариты и масса. Особенно быстрое развитие совершенствование привода получила в последнее время благодаря усовершенствованию традиционных и созданию новых силовых управляемых полупроводниковых приборов, интегральных схем, развитию цифровых информационных технологий и разработке разнообразных систем микропроцессорного управления. Современные компьютерные технологии, в основе которых лежат прикладные пакеты, предоставляют возможность более глубокого изучения вопросов; связанных с проектированием полупроводникового электропривода. Они позволяют качественно изменить и существенно улучшить технологию изучения, перевести ее в виртуальную действительность, осуществить в этой виртуальной лаборатории необходимые исследования с получением количественных результатов. Силовые полупроводниковые преобразователи, существенно улучшая энергетику, позволяют реализовать качественно новые способы регулирования электрическими машинами. При этом классические машины при управлении от полупроводникового преобразователя приобретают новые свойства и качественно новые, лучшие характеристики. Силовые полупроводниковые преобразователи позволяют также реализовать новые конструктивные и технологические решения, обладающие свойствами, недоступными классическому электроприводу. Современный электропривод с использованием полупроводниковых узлов состоит из трех составных частей: электрического двигателя, который осуществляет электромеханическое преобразование энергии, из механической части, которая передаёт механическую энергию рабочему органу машины, и системы управления, которая обеспечивает оптимальное управление технологическим процессом. Характеристики электродвигателя и возможности управления определяют производительность электропривода, точность выполнения всех технологических операций, нагрузки на механическое оборудование и некоторые другие факторы. С другой стороны, нагрузка на механическую часть привода, условия работы ее связанных масс, а также точность передач, оказывают влияние на работу двигателя и на систему управления, поэтому все электрические и механические составляющие электропривода представляют собой единую электромеханическую систему, и все её составные части находятся в непосредственном взаимодействии. И эти свойства электромеханической системы влияют на важнейшие показатели привода и в значительной мере это сказывается на качестве и экономической эффективности технологических процессов. Совершенствование автоматизированного электропривода ведет к развитию конструкций машин, к изменениям технологических процессов, к прогрессу во всех областях народного хозяйства. Главными факторами, которые определяют род тока, тип электродвигателя и его конструктивное исполнение, являются Показатели регулирования скорости, диапазон регулирования, плавность и стабильность скорости. Режим работы производственного механизма. Производительность и надёжность установки. Основные затраты на эксплуатационные расходы на электрооборудование. В этом курсовом проекте на основании технического задания, произведём расчёт электропривода с двигателем постоянного тока независимого возбуждения, не учитывая технико-экономические показатели. Техническое задание на курсовой проект и построение нагрузочной диаграммыЭлектропривод должен обеспечить следующие технологические характеристики: Таблица 1
        Рис 1 1.1 Расчёт мощности электродвигателя. Как видно из нагрузочной диаграммы двигатель работает в повторно-кратковременном режиме. Произведём расчёт требуемой мощности двигателя по эквивалентной мощности. Определим среднеквадратичное значение мощности за время работы двигателя   Расчётная продолжительность включения  Продолжительность включения выбираем из каталожного ряда номинальных значений: 15 %, 25 %, 40 %, 60 %, 100 %. При выборе двигателя учтём стандартное каталожное значение и пересчитаем эквивалентную мощность  Коэффициент запаса принимаем   По таблице П2.1выбираем двигатель постоянного тока независимого возбуждения типа ДП, ПВ=25% ближайшей большей мощности тихоходного исполнения          1.2 Построение естественных механической и электромеханических характеристик электродвигателя Для построения электромеханической характеристики двигателя независимого возбуждения, естественной или реостатной, достаточно знать лишь две ее точки, поскольку все электромеханические характеристики теоретически представляют собой прямые линии. Эти две точки для каждой характеристики могут быть любыми, однако построение каждой из рабочих электромеханических характеристик удобно производить по точкам, одна из которых соответствует статическому току двигателя и технологической скорости  другая точка соответствует скорости идеального холостого хода  Для того, чтобы определить численное значение статического тока якоря двигателя, найдём сопротивление обмотки якоря при температуре 750 С  Номинальная скорость двигателя  Найдём коэффициент ЭДС электромагнитного момента  Скорость идеального холостого хода  Номинальный момент электродвигателя  По найденным точкам строим механическую и электромеханическую характеристику двигателя  Рис 2 Естественная механическая характеристика двигателя  Рис 3 Естественная электромеханическая характеристика электродвигателя Для двигателей постоянного тока пуск, реверс, торможение, а также регулирование скорости производится при ограничениях, наложенных на ток и момент. В электроприводах постоянного тока с релейно-контакторной схемой управления ток якоря ограничивают введением на время пуска в цепь обмотки якоря добавочных сопротивлений. Найдём величину статических токов для заданных нагрузок    Найдём максимально допустимый ток якоря  Проведём построение пусковых характеристик в следующем порядке (Рис 3). Построим первую пусковую (реостатную) электромеханическую характеристику электропривода (1). Эта характеристика проходит через две точки, первая точка это скорость идеального холостого хода, вторая точка имеет координаты  Определим ток переключения  В точке с координатами  произойдет переключение на вторую реостатную характеристику. В этот момент ток опять возрастёт, и вторая реостатная характеристика будет иметь координаты второй точки  В точке с координатами  произойдет переключение на треть реостатную характеристику. В этот момент ток опять возрастёт, и третья реостатная характеристика будет иметь координаты второй точки  В точке с координатами  произойдет переключение на четвёртую естественную характеристику. В этот момент ток опять возрастёт, и естественная характеристика будет иметь координаты второй точки   Рис 4 Электромеханические характеристики электропривода 1 – первая реостатная электромеханическая характеристика 2 – вторая реостатная электромеханическая характеристика 3 –третья реостатная электромеханическая характеристика электродвигателя 4 –естественная электромеханическая характеристика электродвигателя По графику определяем скорости    Из уравнения электромеханической характеристики найдём добавочные сопротивления для каждой из реостатных характеристик.    Точность определения сопротивлений зависит от точности определения координат точек тока и угловой скорости. На основании данных расчёта составим предварительно схему силовой цепи для пуска двигателя постоянного тока (Рис 6)  Рис 5. Схема силовой части цепи электропривода постоянного тока для пуска электродвигателя Определим значения сопротивлений резисторов Rдоб1, Rдоб2, Rдоб3    При пуске двигателя срабатывает контактор КМ1 и двигатель начинает разгоняться на первой реостатной характеристике 1. При достижении скорости переключения  , срабатывает контактор КМ2 и двигатель продолжает разгоняться уже по реостатной характеристике 2. При достижении скорости , срабатывает контактор КМ2 и двигатель продолжает разгоняться уже по реостатной характеристике 2. При достижении скорости  срабатывает контактор КМ3 и двигатель продолжает разгоняться уже по реостатной характеристике. По истечении 45 секунд размыкаются контакты контактора КМ1, КМ2, КМ3 и двигатель останавливается на 150 секунд. Далее цикл повторяется. срабатывает контактор КМ3 и двигатель продолжает разгоняться уже по реостатной характеристике. По истечении 45 секунд размыкаются контакты контактора КМ1, КМ2, КМ3 и двигатель останавливается на 150 секунд. Далее цикл повторяется. После работы на трёх нагрузках, следует остановка двигателя, при этом имеются различные способы торможения, как механические, так и электрические. Из электрических можно применить рекуперативное торможение, торможение противовключением и динамическое торможение. Для нашего проекта задан способ динамического торможения. Произведём расчёт сопротивления динамического торможения, учитывая, что момент и ток двигателя должен быть ограничен  Построим электромеханическую характеристику динамического торможения по формуле  Строить характеристику будем также по двум точкам (Рис 5). Одна точка имеет координаты  И вторая точка имеет координаты   Рис 6 Электромеханические характеристики полного цикла работы электропривода 1 – первая реостатная электромеханическая характеристика 2 – вторая реостатная электромеханическая характеристика 3 – третья реостатная электромеханическая характеристика 4 – естественная электромеханическая характеристика 5 –характеристика динамического торможения электропривода В режиме динамического торможения обмотка якоря отключается от источника постоянного напряжения и замыкается на добавочное сопротивление. Отключение обмотки якоря производится размыканием контакта контактора КМ1 (Рис 8)  Рис 7. Схема силовых цепей привода постоянного тока для полного цикла работы 1.3 Расчёт переходных процессов скорости, момента и тока за один цикл работы привода. Определим суммарный момент инерции привода, приведённый к валу электродвигателя  Расчёт электромеханической постоянной времени при пуске двигателя на реостатной характеристике 1 (Рис 6)  Переходный процесс величины тока при пуске двигателя по реостатной характеристике 1   Переходный процесс величины скорости при пуске двигателя   По графику определяем время переходного процесса  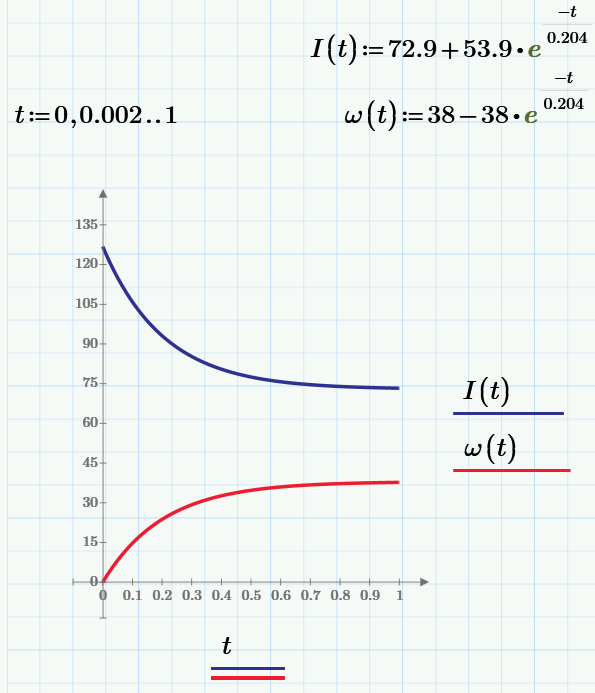 Рис 8 Переходный процесс по характеристике № 1 Расчёт электромеханической постоянной времени при работе двигателя на реостатной характеристике 2 (Рис 6)  Переходный процесс величины тока при работе двигателя по реостатной характеристике 2   Переходный процесс величины скорости при пуске двигателя   По графику определяем время переходного процесса  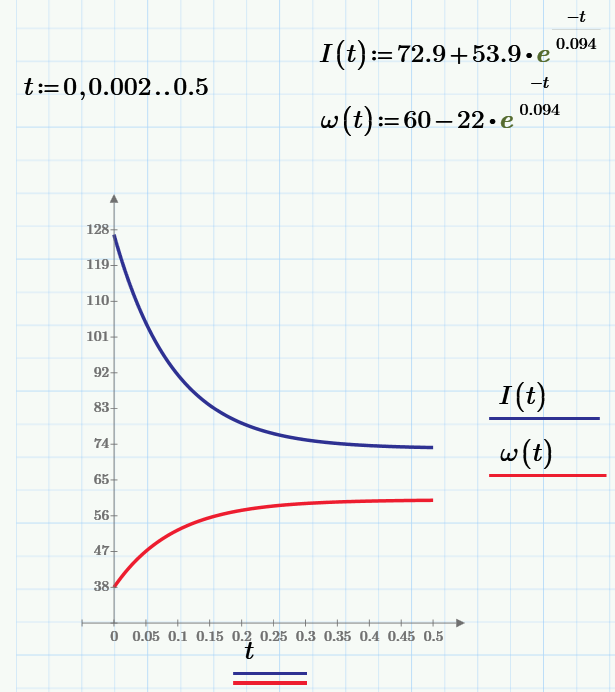 Рис 9 Переходный процесс по характеристике № 2 Расчёт электромеханической постоянной времени при работе двигателя на реостатной характеристике 3 (Рис 6)  Переходный процесс величины тока при работе двигателя по реостатной характеристике 3   Переходный процесс величины скорости при работе двигателя на реостатной характеристике 3   По графику определяем время переходного процесса  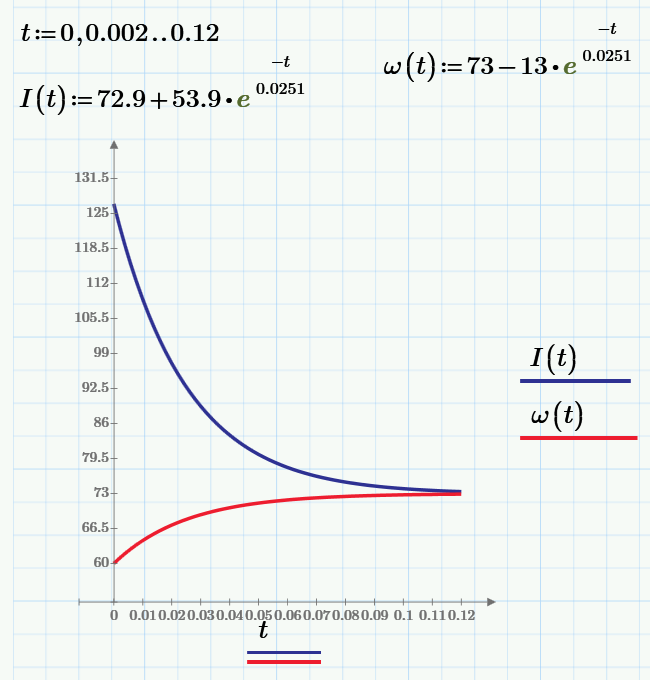 Рис 10 Переходный процесс по характеристике № 3 Расчёт электромеханической постоянной времени при работе двигателя при динамическом торможении (Рис 6)  Переходный процесс величины тока при торможении   Переходный процесс величины скорости при торможении   По графику определяем время переходного процесса  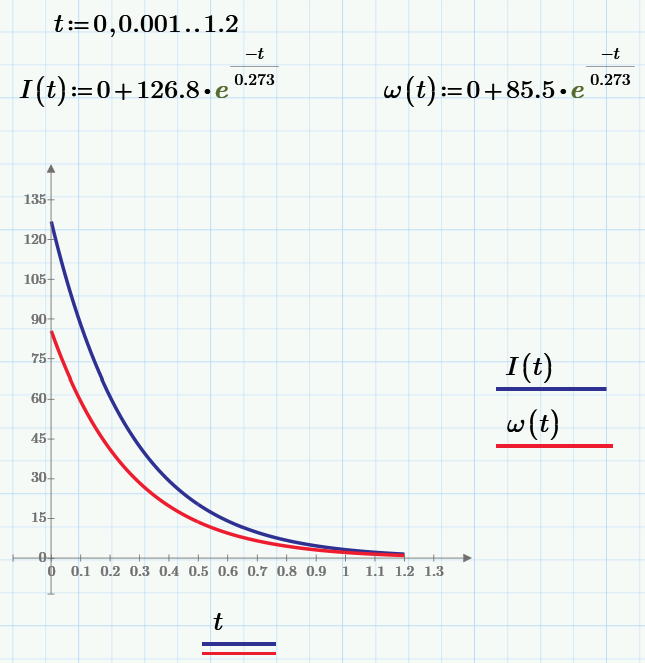 Рис 11 Переходный процесс при торможении Проверка электродвигателя по нагревуВо время работы двигателя, возникают потери, которые вызывают нагревание двигателя и его отдельных частей. При нагреве выше допустимых норм может привести к нарушению работоспособности двигателя. Рассчитаем величину эквивалентного тока. Для того чтобы при этом учесть и работу двигателя во время переходных процессов, на каждом участке переходного процесса определим средний ток и время окончания переходного процесса возьмём из графиков            Сравним величину эквивалентного тока с величиной номинального тока статора  Величина эквивалентного тока не превышает величину номинального тока статора, поэтому двигатель перегреваться не будет 3. Схема управления электроприводомРазработаем развернутую схему релейного управления электродвигателя постоянного тока с независимым возбуждением. Пуск двигателя можно производить управлением переключения реостатной нагрузки в цепи якоря 1. В функции времени, когда переключение ступеней производится через фиксированные промежутки времени. 2. В функции скорости, когда переключение ступеней производится при достижении двигателем определенной скорости. 3. В функции управления переключением ступеней исполнительным механизмом, когда переключение ступеней производится при достижении исполнительным механизмом определенного положения. 4. Переключение ступеней может производится также вручную, когда требуется визуальный контроль за работой устройств (например, при производстве погрузочно-разгрузочных работах). В нашем случае релейно-контакторная схема управления электроприводом изображена на рисунке 13. Рассмотрим работу привода Выпишем значения сопротивлений в цепи обмотки якоря.      Рис 12 Рассмотрим работу схемы управления двигателем постоянного тока с пусковыми резисторами в цепи якоря (Рис 12). Перед пуском электропривода нужно включить автоматический выключатель ВА. На схему подаётся напряжение постоянного тока. От независимого источника постоянного тока запитывается обмотка возбуждения ОВ, в цепи которого срабатывает реле обрыва поля РОВ, которое замыкает свой контакт в цепи контактора КМ1. Включается реле времени КТ1 и размыкает свой контакт в цепи управления. Схема готова к включению. Для пуска двигателя надо кратковременно нажать на кнопку «ПУСК», при условии, что реле максимального тока КА и реле времени КТ4 находятся в выключенном состоянии, а реле обрыва поля РОВ включено, то срабатывает контактор КМ1, который своими контактами подключает обмотку якоря двигателя к напряжению постоянного тока, двигатель начинает разгоняться по реостатной характеристике № 1. Реле времени КТ1, потеряв питание вследствие размыкания контакта КМ1, начинает отсчёт выдержки времени разгона на реостатной характеристике до скорости ω1. От появления напряжения на резисторах R2, R3, R4 включаются реле времени КТ2, КТ3, KT4 которые размыкают свои размыкающие контакты в цепях контакторов ускорения КМ2, КМ3, KM4. Через 0,7 секунды размыкающий контакт КТ1 замкнётся и включит контактор КМ2. Контактор КМ2 своими контактами закорачивает резистор R4 и одновременно закорачивает катушку реле времени КТ2. Реле времени теряет питание и начинает отсчёт времени разгона двигателя по второй реостатной характеристике 2 (Рис 6). Через 0,4 секунды размыкающий контакт КТ2 замкнётся и включит контактор КМ3. Двигатель продолжит разгон на третьей реостатной характеристике 3. По истечению времени работы на третьей реостатной характеристике размыкающий контакт реле времени КТ3 замыкается, которое своим замыкающим контактом закорачивает резистор R3, двигатель переходит на естественную механическую характеристику 4 (Рис 6). Далее электродвигатель работает на первой нагрузке 10 секунд, потом на второй нагрузке от работает 15 секунд и на третьей нагрузке работает 20 секунд. По истечению времени работы двигателя на третьей нагрузке срабатывает реле КД, которое своим контактом подключает резистор Rдт для динамического торможения. При снижении напряжения на обмотке реле KV до напряжения отпускания этого реле, оно своими контактами KV снимает питание с контактора КД и оно отключает резистор торможения Rдт. Повторное включение двигателя должно произойти через 150 секунд от внешних устройств замыканием контакта КВ или нажатием кнопки ПУСК на пульте управления. Для отключения привода надо кратковременно нажать на кнопку СТОП. В результате схема приходит в исходное состояние. Привод также может отключится при срабатывании реле обрыва поля РОВ. Привод также может отключиться при перегрузках, при срабатывании реле максимального тока КА. ЗаключениеПо заданной проектной нагрузочной диаграмме была определена по этой диаграмме эквивалентная мощность и был произведен расчёт по выбору двигателя постоянного тока с независимым возбуждением, во время которого было учтено необходимое условие Pн ≥ Pэ. Также проверили выбранный электродвигатель на нагрев. Определили сопротивление резисторов, которые нужно включить в цепь якоря рассчитанного двигателя для пуска электродвигателя. Построили естественную характеристику и искусственные характеристики двигателя. Рассчитали сопротивления пусковых резисторов. Начертили и изучили схему управления пуском, работы, защиты и остановки электропривода с двигателем постоянного тока с независимым возбуждением. Использованная литература1. Г.В. Никитенко ЭЛЕКТРОПРИВОД ПРОИЗВОДСТВЕННЫХ МЕХАНИЗМОВ Учебное пособие для вузов 2. Чиликин М. Общий курс электропривода. 6-е изд./ М.: Энергоатомиздат, 1984. 3. Москаленко В Электрический привод/ М.: Высшая школа, 1991. 4. Вольдек А. Электрические машины/ Энергия, 1978. 5. Справочник по электрическим машинам/ Под общ. ред. И. Копылова М.: Энергоатомиздат, 1998. 6. Дьяков В.И. Типовые расчёты по электрооборудованию: практическое пособие / В.И. Дьяков. – 7-е изд. – М.: Высш. шк., 1991. – 120 с. 7. Сокунов Б.А. Электротермические установки: учеб. пособие / Б.А. Сокунов, Л.С. Гробова. – Екатеринбург: ГОУ ВПО УГТУ - УПИ, 2004. – 122 с. | ||||||||||||||||||||||