Нейросетевой регулятор. Разработка нейросетевого регулятора для управления параметрами твр в специальном сооружении Актуальность темы
 Скачать 0.73 Mb. Скачать 0.73 Mb.
|

|
Разработка нейросетевого регулятора для управления параметрами ТВР в специальном сооружении Актуальность темы: Достичь высокого качества возможно посредством создания адаптивных автоматизированных систем управления технологическими процессами. На сегодняшний день наиболее перспективным представляется использование нейросетевых регуляторов для управления параметрами ТВР в процессе хранения специального боеприпаса. Цель работы: Целью работы является разработка интеллектуального комплекса для адаптивного управления параметрами ТВР хранения специального боеприпаса. Объектом исследования является специальное сооружение для безопасного хранения специального боеприпаса, а также процессы сбора, анализа и обработки информации, в задачах непрерывного контроля ТВР. Методы и средства исследований: В работе используются аналитические методы исследования и методы компьютерного моделирования. Поставленные в работе задачи решены с использованием методологических и математических основ построения адаптивных систем поддержки и принятия решений, основных положений теории автоматического управления, теории нейронных сетей, общих принципов математического моделирования, элементов теории искусственного интеллекта. Численная и графическая обработка результатов исследований производилась с применением MatLab, системы визуального моделирования Simulink и SCADA-системы TraceMode. Основная часть: Основными параметрами являются температура воздуха в СС, влажность воздуха и химический состав воздуха, а именно концентрация углекислого газа. Определены основные возмущающие факторы (рисунок 1). 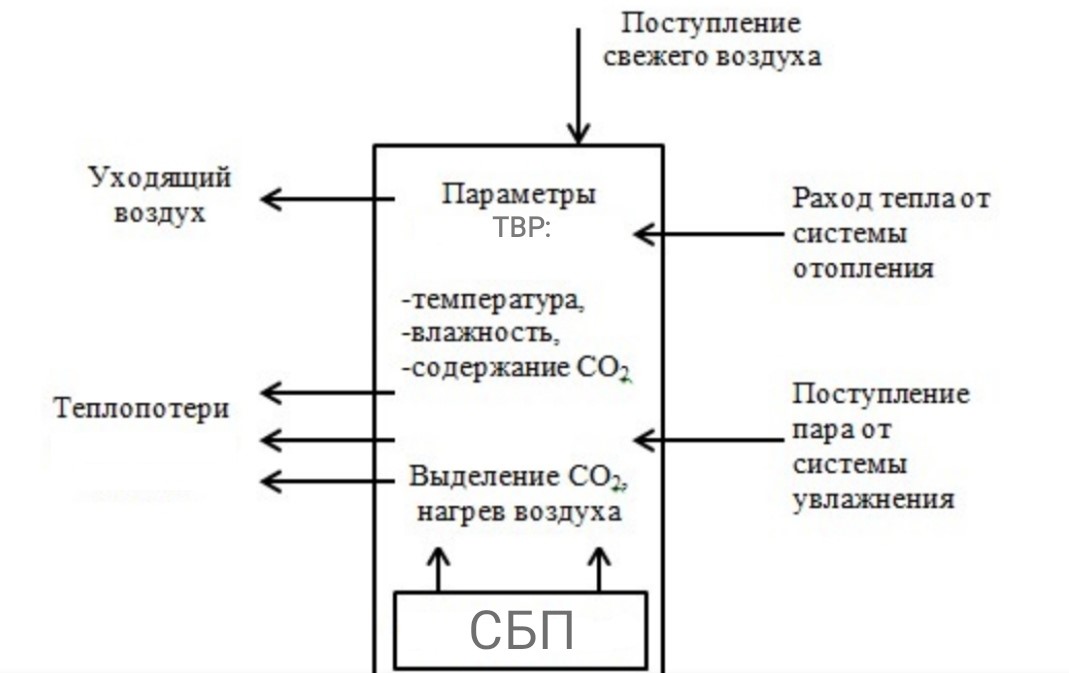 Рисунок 1. Основные возмущающие факторы. Возмущающие воздействия на схеме следующие: - Потребление свежего воздуха системой вентиляции - Уходящий воздух - Теплопотери - Выделение СО2 и нагрев воздуха Управляющие воздействия следующие: - Расход тепла от системы отопления - Расход пара от системы увлажнения - Количество поступившего свежего воздуха Проанализировано влияние каждого из параметров. В настоящее время регулирование ТВР осуществляется при помощи измерительных приборов, а это в ряде случаев затруднительно. Поэтому для решения данной задачи целесообразно использовать интеллектуальные технологии нового поколения, а именно нейросетевые регуляторы, которые являются стратегическим направлением для управления подобных технологических процессов. После получения характеристик связей между параметрами, был подобран критерий качества, удовлетворяющий текущим требованиям ТВР. Данный критерий необходим при построении интеллектуальной нейросетевой модели. Для построения интеллектуального комплекса адаптивного управления необходимо уточнение математической модели ТВР в СС для хранения различных типов СБП, определяющих динамические качества систем. Данная модель должна учитывать, что рассматриваемые параметры тесно связаны между собой и подвержены влиянию различных возмущающих факторов. Для этого была построена структура взаимосвязи входных и выходных параметров ТВР в СС (рисунок 2). 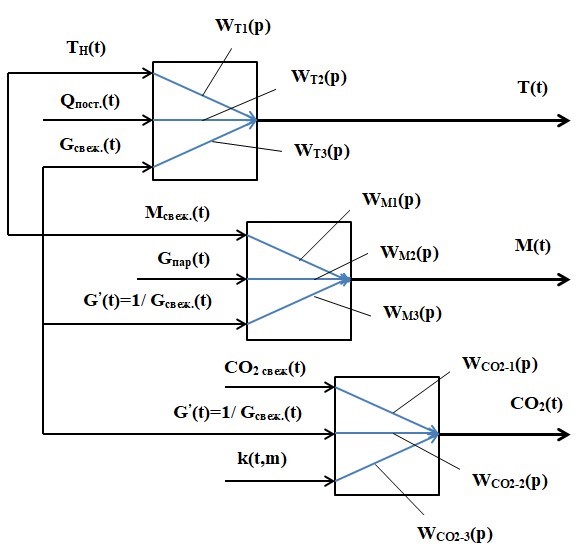 Рисунок 2. Взаимосвязи параметров ТВР и различных возмущающих и управляющих факторов. Они представлены в виде передаточных функций. На температуру воздуха в силосе влияют следующие возмущающие и управляющие воздействия (1), (2) и (3): 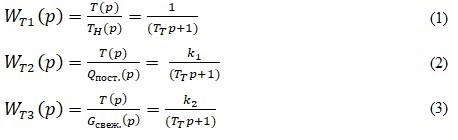 T(p) – изображение Лапласа для температуры внутри СС. Тн.(р) – изображение Лапласа для наружной температуры воздуха. ТТ – постоянная времени. Qпост. – расход теплого воздуха. Gсвеж. – расход свежего воздуха. k1,2 – коэффициенты работы системы отопления. Проанализировав параметр влажности воздуха внутри СС М(t), выявлены следующие возмущающие и управляющие параметры (4), (5), (6): 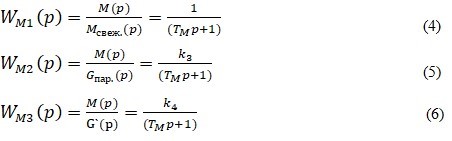 M(p) – изображение Лапласа для влажности воздуха внутри СС. Мсвеж.(р) – изображение Лапласа для влажности свежего воздуха. TM – постоянная времени процесса увлажнения паром. Gпар. – расход пара для увлажения. G’(p) – изображение Лапласа для расхода пара. k3, k4 – коэффициенты преобразования по расходу пара и свежего воздуха. Передаточные функции взаимосвязи возмущающих и управляющих воздействий на качество воздуха, т.е. содержания СО2 в СС представлено следующими передаточными функциями (7), (8) и (9):  СО2(p) – изображение Лапласа для концентрации углекислого газа в СС. СО2 свеж. – изображение Лапласа для концентрации углекислого газа в поступающем свежем воздухе. ТСО2 – постоянная времени процесса воздухообмена. G’(p) – изображение Лапласа для расхода воздуха в системе воздухообмена. K, k5, k6 – коэффициенты преобразования по расходу воздуха и выделению СО2. На основании структуры взаимосвязи параметров ТВР и различных влияющих факторов, сделан вывод, что большое значение для адаптивного управления процессом хранения СБП является не только точное поддержание контролируемых параметров, но и их сочетания между собой, что требует использования интеллектуальных технологий. Предлагаю использовать систему с нейросетевым регулятором (НС-Р). Структура нейросетевого регулятора представлена на рисунке 3. На вход регулятора подаются такие входные параметры как температура T(t), влажность M(t), содержание СО2 Q(t), а также возмущающие параметры: наружная температура Tout(t) и наружное содержание СО2 Qout(t). НС-Р состоит из четырех основных блоков. От системы сбора данных, например SCADA-системы, сведения о параметрах и возмущающих воздействиях объекта управления поступают в базу данных, которая передает параметры на модуль обучения, где происходит обучение нейросети. Вместе со входными параметрами база данных передает на нейросеть также предыдущие значения параметров ТВР и значения управляющих воздействий. 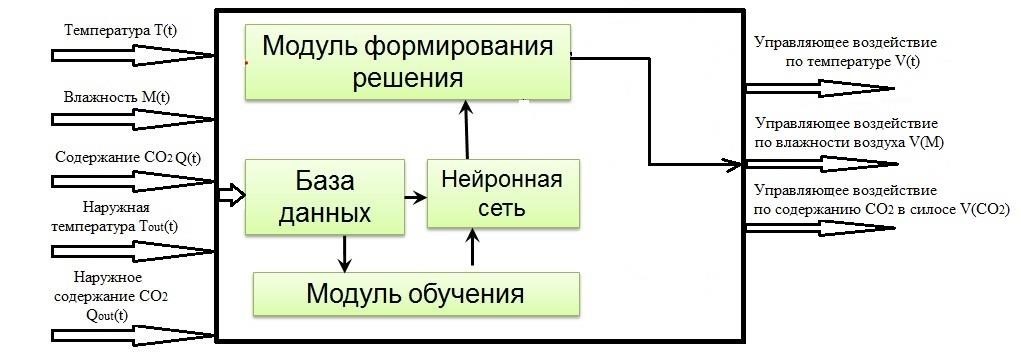 Рисунок 3. Структура НС-Р. Далее обученная нейросеть посредством модуля формирования решения направляет управляющие воздействия непосредственно на исполнительные механизмы. Соответственно на выходе НС-Р выдаются физические величины управляющего воздействия на температуру VT(t), влажность VM(t) и содержание СО2 VCO2(t) в специальном сооружении. В основе нейросетевого регулятора лежит нейронная сеть прямого распространения типа многослойный персептрон с одним скрытым слоем и тремя выходными параметрами. В данной сети каждый нейрон предыдущего слоя связан со всеми нейронами последующего слоя. Структура нейронной сети представлена на рисунке 4. 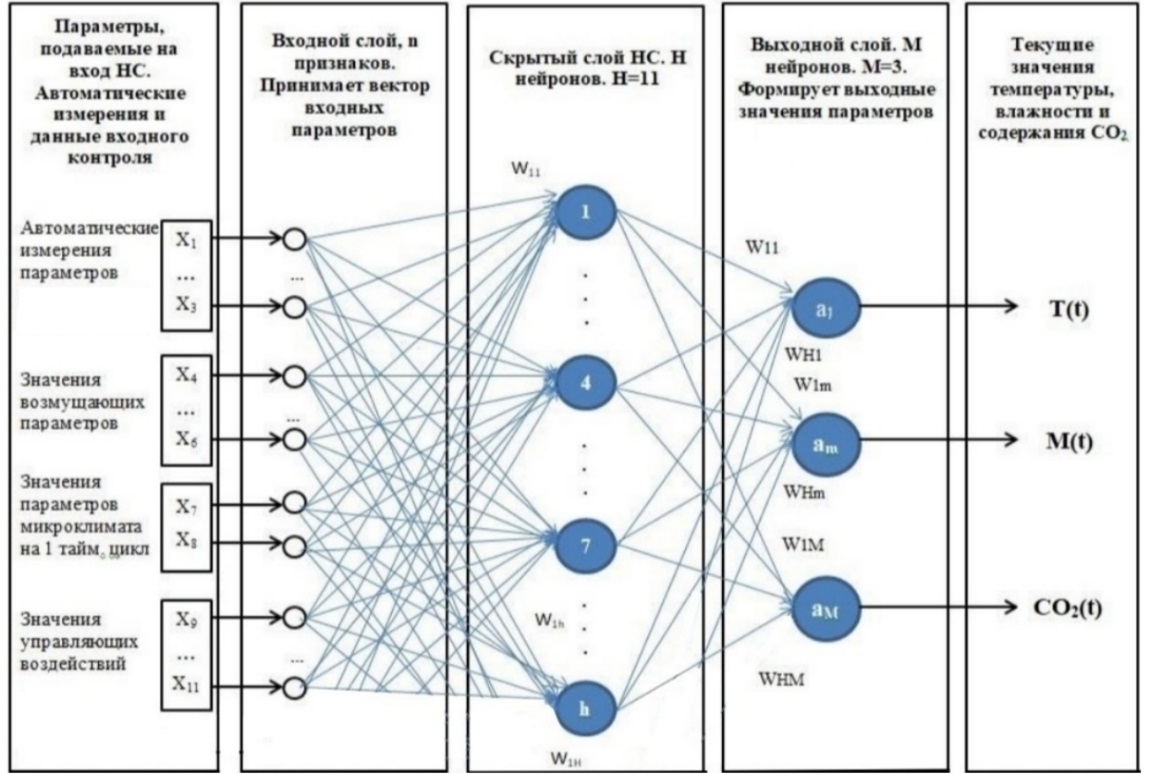 Рисунок 4. Структура разработанной искусственной нейронной сети с тремя выходными параметрами. На входной слой нейросети подается вектор входных параметров Хn, отраженных в таблице 1. Количество нейронов выходного слоя равно одиннадцати. Изменение синаптических весов происходит по градиентному методу обратного распространения ошибки. Взаимодействие искусственной нейронной сети с обратным распространением ошибки может эффективно решать задачи, связанные с недостаточной определенностью параметров ПИД-управления. Это объясняется возможностью НС аппроксимировать любую нелинейную функцию, простотой структуры сети и особенностями алгоритма обучения. Данная нейронная сеть непосредственно выполняет функции регулятора. Таблица 1. Параметры, подаваемые на вход нейросети.
Алгоритм обучения сети методом back-propagation — обратного распространения ошибки состоит из некоторого количества повторяющихся шагов (рисунок 5). В случае, когда все весовые коэффициенты скорректированы, снова проходит прямое распространение сигналов от входов НС к выходам, и т.д. За счет постоянного корректирования параметра обучения и весовых коэффициентов, нейрорегулятор адаптируется к изменениям параметров объекта управления, основываясь на измеренных значениях показателей рассогласования. Таким образом, применение метода, основанного на работе НС-Р позволяет работать с наборами входных параметров любого уровня декомпозиции и учитывать влияние каждого параметра на итоговые оценки величин значений температуры, влажности воздуха и содержание СО2 в специальном сооружении с помощью значений весовых коэффициентов. Полученные значения сравниваются с контрольными показателями путем статистической обработки данных, в результате чего рассчитывается отклонение значений от эталонных и выдается результат о соответствии этих показателей заданным значениям для выполнения дальнейших действий в процессе хранения СБП. 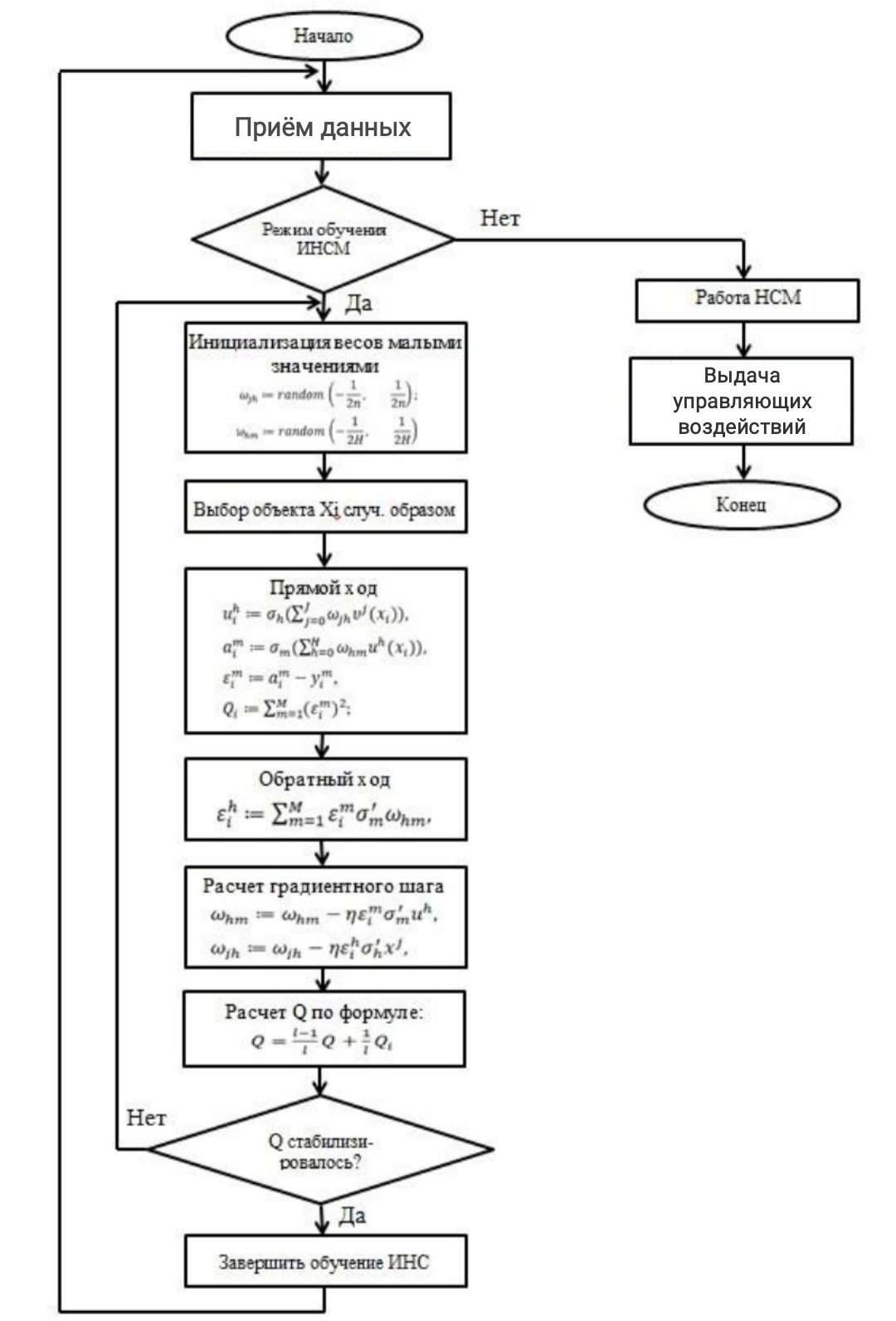 Рисунок 5. Алгоритм работы нейросетевой модели. На основании проведенных исследований и полученных результатов был построен алгоритм работы интеллектуального комплекса адаптивного управления параметрами ТВР (рисунок 6). 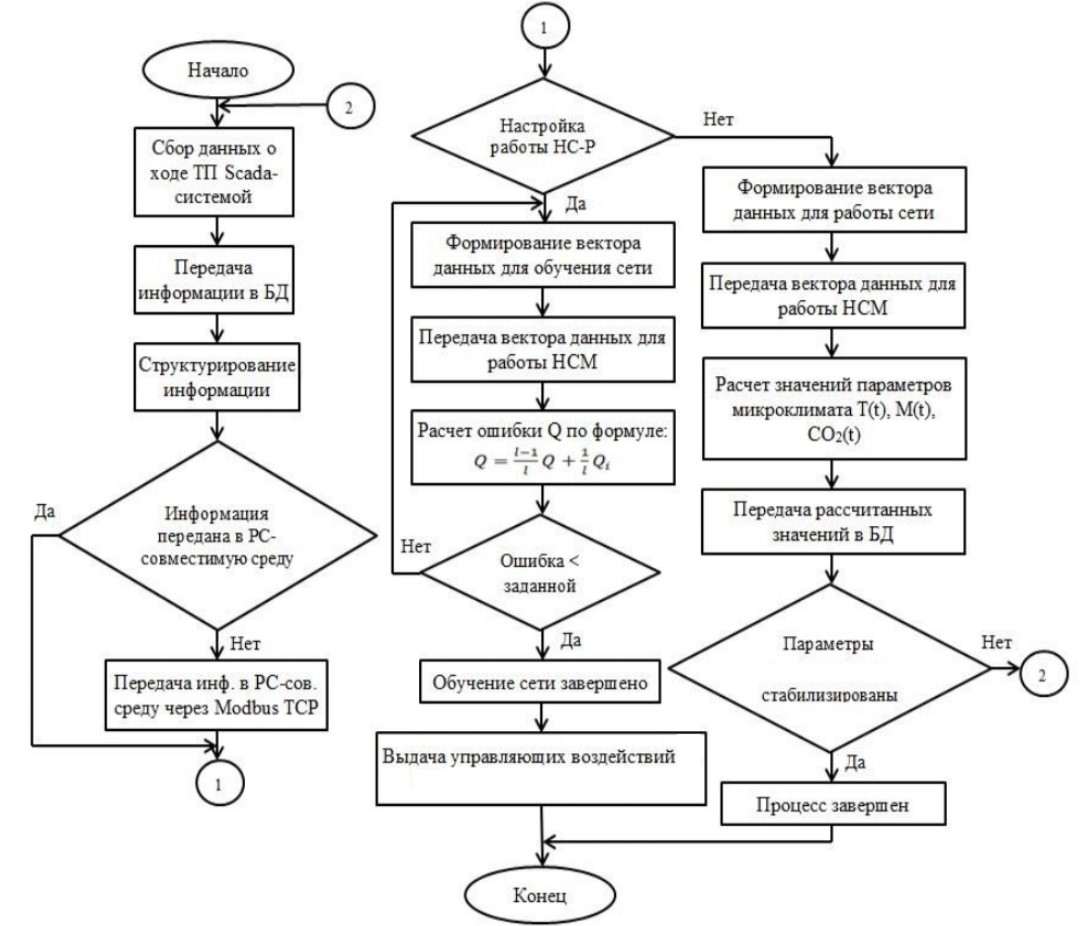 Рисунок 6. Алгоритм работы интеллектуального комплекса адаптивного управления параметрами ТВР. От SCADA-системы информация подается в БД, где она хранится в структурированном виде. Нейросетевая модель производит автоматический расчет основных величин параметров микроклимата: температуры, влажности и содержания СО2 внутри СС. НСМ в определенные промежутки времени получает данные из БД и преобразовывает полученные векторы данных в необходимые нам величины параметров ТВР в СС. В результате работы данного алгоритма управляющие воздействия будут поданы непосредственно на исполнительные механизмы. Таким образом, интеллектуальный комплекс с нейросетевым регулятором обеспечил адаптацию параметров процесса при непрерывно изменяющихся внешних условиях со стабилизацией параметров в пределах допустимой точности управления. |