ультразвуковые датчики реферат. Реферат ультразвуковые датчики. Реферат на тему Ультразвуковые датчики по учебной дисциплине
 Скачать 338 Kb. Скачать 338 Kb.
|

|
Национальный исследовательский ядерный университет «МИФИ» «Защищенные высокопроизводительные вычислительные системы и технологии» РЕФЕРАТ на тему Ультразвуковые датчики по учебной дисциплине: «Архитектура информационных систем/ Датчики и интерфейсы для робототехники» Выполнил: Ахмад Радмир Мустафа Проверил: Джаманшалов Муратбек Кусманович Алматы, 2022 Содержание Введение……………………………………………………………………………... Error: Reference source not found 1 Ультразвуковые датчики - назначение, устройство и принцип работы. Error: Reference source not found 1.1 Ультразвуковые датчик движения. 5 1.2. Двоичное обнаружение предмета. 8 2 Магнитострикционные излучатели 10 2.1. Излучатели ультразвуковых колебаний…………………………………… 11 2.2. Применение ультразвуковых датчиков……………………………………. 14 Заключение…………………………………………………………………………. 16 Список использованных источников……………………………………………... 17 Введение Работа ультразвуковых датчиков основана на взаимодействии ультразвуковых колебаний с измеряемой средой. К ультразвуковым относят механические колебания, происходящие с частотой более 20 000 Гц, т. е. выше верхнего предела звуковых колебаний, воспринимаемых человеческим ухом. Распространение ультразвуковых колебаний в твердых, жидких и газообразных средах зависит от свойств среды. Например, скорость распространения этих колебаний для разных газов находится в пределах от 200 до 1300 м/с, для Жидкостей — от 1100 до 2000, для твердых материалов — от 1500 до 8000 м/с. Очень сильно выражена зависимость скорости колебаний в газах от давления. Различны коэффициенты отражения ультразвуковых волн на границе раздела разных сред, различна и звукопоглощательная способность разных сред. Поэтому в ультразвуковых датчиках информация о различных неэлектрических величинах получается благодаря измерению параметров ультразвуковых колебаний: времени их распространения, затухания амплитуды этих колебаний, фазового сдвига этих колебаний. Ультразвуковые методы измерения относятся к электрическим методам постольку, поскольку возбуждение ультразвуковых колебаний и прием этих колебаний выполняются электрическим способом. Обычно для этого используют пьезоэлементы и магнитострикционные преобразователи. В гл. 7 были рассмотрены пьезоэлектрические датчики, преобразующие давление в электрический сигнал. Это прямой пьезоэффект. Он используется в приемниках ультразвукового излучения. Обратный пьезоэлектрический эффект заключается в сжатии и растяжении пьезокристалла, к которому приложено переменное напряжение. Для возбуждения ультразвуковых колебаний и используется этот эффект. Таким образом, пьезоэлемент может использоваться попеременно то излучателем, то приемником ультразвуковых колебаний. 1 Ультразвуковые датчики - назначение, устройство и принцип работы 1.1 Ультразвуковые датчик движения Ультразвуковые датчики обнаруживают объекты и материалы различной формы, цвета и поверхности, путем изучения ультразвуковых волн, которые отражаются от обнаруживаемого предмета и возвращаются к излучателю. Расстояние на котором они работают колеблется от десятков сантиметров до 8 или 10 метров. Ультразвук, звук частотой более 16 кГц, человек не воспринимает, тем не менее, скорость его распространения в воздушной среде известна, и составляет 344 м/с. Располагая данными о скорости звука и времени его распространения, можно вычислить точное расстояние, которое прошла ультразвуковая волна. Этот принцип положен в основу работы ультразвуковых датчиков. Ультразвуковые датчики широко применяются в самых разных сферах производства, и в некотором роде являются универсальным средством решения многих задач автоматизации технологических процессов. Такие датчики применяются для определения удаленности и местонахождения различных объектов. Определение уровня жидкости (например, расхода топлива на транспорте), обнаружение этикеток, в том числе и прозрачных, контроль передвижения объекта, измерение расстояния, - вот лишь некоторые из возможных применений ультразвуковых датчиков. Как правило, на производствах немало источников загрязнения, что может стать проблемой для многих механизмов, но ультразвуковой датчик, в силу особенностей его работы, абсолютно не боится загрязнений, поскольку корпус датчика, при необходимости, может быть надежно защищен от возможных механических воздействий. Активный диапазон ультразвукового датчика является рабочим диапазоном обнаружения. Диапазон обнаружения – это то расстояние, в пределах которого ультразвуковой датчик может обнаружить объект, и неважно, приближаются ли объект к чувствительному элементу в осевом направлении или двигается поперек звукового конуса.  Рис 1.1 - Устройство ультразвукового датчика движения Принцип действия: ультразвуковой датчик вычисляет время, которое требуется звуку для движения от датчика до объекта и назад на датчик (диффузионный режим работы) или проверяет, был ли получен посланный сигнал отдельным приемником (оппозитный режим работы). Оппозитный режим работы 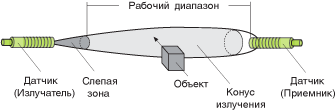 Рис. 1.2 – Оппозитный режим работы Передатчик и приемник являются отдельными устройствами и монтируются друг напротив друга. Выход выключателя активизируется, если ультразвуковой пучок прерывается объектов. Особенности: – Широкий диапазон, так как ультразвуковой пучок проходит сигнальное расстояние один раз; – Менее восприимчив к интерференции, подходит для работы в трудных условиях; – Очень быстрые переключения; – Повышенная стоимость монтажа, так как должны быть подключены два датчика (Излучатель и Приемник). Диффузионный режим работы: 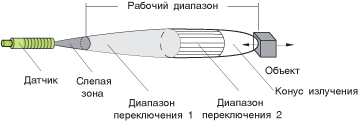 Рис. 1.3 – Диффузионный режим работы Передатчик и приемник находятся в одном корпусе. Это минимизирует стоимость монтажа, так как необходимо монтировать и подключить только один прибор. Время срабатывания дольше, чем у датчиков в оппозитном режиме. ультразвуковой датчик рефлекторный оппозитный. Переключающий выход. Точка переключения у датчиков с двумя независимыми точками переключения каждый выход становится активным, когда объект находится в диапазоне переключения 1 и 2. Эти точки переключения могут быть произвольно настроенными в рабочем диапазоне. 1. 2 Двоичное обнаружение предмета Рабочий цикл звуковых импульсов определяет расстояние до объекта. Точка переключения или окно переключения определяется с точностью до миллиметра позиционирования посредством предварительной обучающей настройки или программирования. Расстояние до объекта от датчика, сравнивается с точкой переключения или окном переключения, выходные переключатели включаются или выключаются в зависимости от результата этого сравнения. При обучающей настройке датчика с помощью двух потенциометров, кнопок или программатора (в зависимости от модели датчика) устанавливаются начало первого диапазона переключения 1 и конец второго диапазона переключения 2. Конец диапазона переключения 1 одновременно является началом диапазона переключения 2. Особенности: – Диапазон обнаружения зависит от свойств поверхности и угла падения на объект; – Простая установка, полноценный датчик в одном блоке Как правило, обнаружение объектов представлено двоичным сигналом в переключающем выходе, или аналоговым сигналом расстояния в аналоговом выходе (4…20 мА или 0…10В). Излучатель и приемник устанавливаются в одном и том же корпусе. Ультразвуковой луч отражается назад на приемник от фона (рефлектора). Объекты, входящие в диапазон обнаружения, обнаруживаются: – путем изменения в измеряемом расстоянии; – путем потери в отраженном сигнале из-за поглощения или отражения; Выход ультразвукового датчика включается в следующих случаях: – Датчик получает эхо от маленького объекта в звуковом конусе и от опорного рефлектора; – Датчик обнаруживает большой объект и больше не получает эхо от опорного рефлектора; – Датчик не получает эхо, так как наклонный предмет отклоняет звук. Положение опорного рефлектора не должно изменяться. 2 Магнитострикционные излучатели Магнитострикционные излучатели ультразвука используют явление деформации ферромагнитов в переменном магнитном поле. Поясним работу ультразвукового датчика на примере эхолота — прибора для измерения глубины моря (рис. 13.1). При подаче переменного напряжения на пьезоэлемент 1 возбуждаются ультразвуковые колебания, направленные вертикально вниз. Отраженный ультразвуковой импульс воспринимается пьезоэ-лементом 2. Электрический прибор 3 измеряет время t между посылаемым и принимаемым импульсами. Глубина моря пропорциональна этому времени и скорости распространения звука и в воде Н = υt/2. 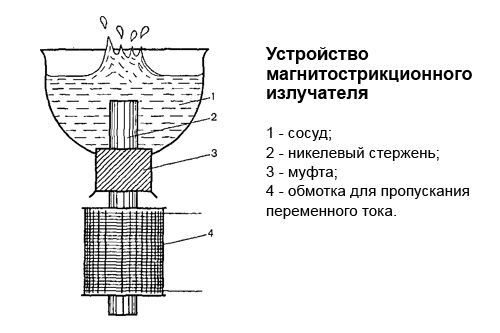 Рис 1.1 - Устройство Магнитострикционного излучателя Шкала прибора градуируется непосредственно в метрах. Аналогично действует ультразвуковой локатор, определяющий расстояние до препятствия на пути корабля в горизонталь-лом направлении. Некоторые животные (например, летучие мыши и дельфины) имеют органы ориентировки, действующие по принципу ультразвукового локатора. Ультразвуковые колебания имеют энергию значительно большую, чем звуковые, поскольку энергия пропорциональна квадрату частоты. Кроме того, сравнительно просто осуществляется направленное излучение ультразвука. С помощью ультразвуковых датчиков обнаруживают дефекты в металлических деталях: трещины в изделиях, полости в отливках и т. д. Ультразвуковые датчики играют важную роль в дефектоскопии, в неразрушающих методах контроля. Кроме того, ультразвуковые датчики используются в приборах для измерения расхода, уровня, давления. 2.1 Излучатели ультразвуковых колебаний В ультразвуковых электрических датчиках наибольшее распространение получили магнитострикционные и пьезоэлектрические излучатели, возбуждаемые с помощью полупроводниковых и электронных генераторов, вырабатывающих переменное напряжение с частотой более 10 кГц. Часто применяется и импульсное возбуждение ультразвуковых излучателей. Магнитострикционный излучатель стержневого типа представляет собой набор тонких листов из ферромагнитного материала, на который намотана обмотка возбуждения. Чаще всего в магнитострикционных излучателях используется никель и его сплавы (инвар и монель), а также ферриты. Если стержень из ферромагнитного материала находится в переменном магнитном поле, то он будет попеременно сжиматься и разжиматься, т. е. деформироваться. Зависимость относительного изменения длины ∆l/l стержня из никеля от напряженности магнитного поля Н показана на рис. 13.3. Так как знак деформации не зависит от направления поля, то частота колебании деформации будет в два раза больше частоты переменного возбуждающего поля. Для получения больших механических деформаций используют постоянное подмагничивание стержня, чтобы работать на наиболее крутом участке кривой. Магнитострикционные излучатели работают в условиях резонанса, когда частота возбуждающего поля совпадает (настроена в резонанс) с частотой собственных упругих колебании стержня, которая определяется по формуле Формула 2.1 где l — длина стержня; Е — модуль упругости; р — плотность материала. Для никелевого стержня длиной l= 100 мм частота собственных колебаний составляет 24,3 кГц, амплитуда достигает примерно 1 мкм. Наивысшая частота, на которой еще удается возбудить достаточно интенсивные колебания, составляет 60 кГц, что соответствует длине 40 мм. Помимо основной частоты в стержне можно возбудить и колебания на высших гармониках (при соответствующем креплении стержня), но с меньшей амплитудой. В пьезоэлектрическом излучателе ультразвуковых колебаний используется пластина кварца (рис. 13.4), к которой приложено переменное напряжение Ux, создающее электрическое поле в направлении электрической оси X (см. рис. 7.1). Продольный обратный пьезоэффект заключается в деформации пластины по оси X. При этом относительное изменение толщины пластины Формула 2.2 Поперечный обратный пьезоэффект заключается в деформации пластины в направлении механической оси Y. При этом относительное изменение длины пластины. Формула 2.3 Как видно из (13.3), продольная деформация не зависит от размеров пластины, а поперечная деформация, как следует из (13.4), увеличивается с ростом отношения l/а. При напряжениях до 2,5 кВ сохраняется прямая пропорциональность между величиной деформации и напряжением. При больших напряжениях деформация увеличивается не столь быстро и при Ux=25 кВ оказывается на 30 % меньшей, чем рассчитанная по (13.3) и (13.4). Амплитуда колебаний достигает максимума при равенстве частоты приложенного напряжения и частоты собственных колебаний пластины. Частота собственных продольных колебаний определяется по формуле, аналогичной (13.4), где модуль упругости берется в направлении оси X: Формула 2.4 Частота собственных поперечных колебаний зависит от модуля упругости в направлении оси Y: Формула 2.5 Для кварцевых пластин fa=285/а [кГц] и f1= 272,6/l [кГц], где размеры пластины выражены в сантиметрах. По сравнению с магнитострикционными пьезоэлектрические излучатели обеспечивают значительно большую (на 1—2 порядка) частоту ультразвуковых колебаний. 2.2 Применение ультразвуковых датчиков В ультразвуковых уровнемерах и дефектоскопах используется свойство ультразвука отражаться от границы двух сред. Соотношение между энергиями отраженных и падающих колебаний называется коэффициентом отражения. Этот коэффициент весьма велик для сред, существенно отличающихся по плотности и скорости распространения звука. Например, коэффициент отражения на границе вода — сталь составляет 88, а на границе вода — трансформаторное масло он равен 0,6. Но даже и при малых коэффициентах отражения полученный отраженный сигнал вполне достаточен для измерения положения уровня раздела двух сред. Мерой уровня является время распространения колебаний от источника излучения к границе раздела и обратно к приемнику. Эти величины уровня и времени связаны между собой соотношением. Благодаря свойству ультразвуковых колебаний распространяться в любых упругих средах между излучателем и измеряемой средой может находиться металлическая стенка, что позволяет вести измерение без контакта измерительных элементов с контролируемой средой и без электрических вводов в резервуар. В ультразвуковых уровнемерах используется в основном импульсный режим передачи колебаний в среду. При этом пьезоэлемент может попеременно работать то излучателем, то приемником ультразвука. Схема ультразвукового уровнемера показана на рис. 13.5. Электрические высокочастотные импульсы от генератора 2 подаются по кабелю к пьезоэлементу датчика 1, который излучает ультразвуковые колебания в измеряемую среду. Эти колебания отражаются от границы раздела сред и возвращаются к пьезоэлементу, который преобразует их в электрический сигнал. Этот сигнал усиливается усилителем З и подается на измерительное устройство 4, определяющее время между посылкой импульса генератором 2 и приходом импульса в усилитель 3. В результате многократного отражения посланного импульса могут вернуться три-четыре сигнала, убывающие по амплитуде и запаздывающие друг относительно друга на одинаковое время. Частота посылаемых импульсов должна быть не слишком большой, чтобы все отраженные сигналы успели вернуться до посылки следующего импульса. Ультразвуковые уровнемеры обеспечивают точность в 1 % при измерениях уровня в 5—10 м в условиях высокой температуры, высокого давления, большой химической активности контролируемой среды. В воздухе ультразвуковые колебания затухают во много раз быстрее, чем в жидких (и вообще в более плотных) средах. Поэтому предпочтительнее располагать излучатель и приемник под резервуаром, а не сверху. В ультразвуковом расходомере используется эффект сложения скорости распространения ультразвука в упругой среде со скоростью движения этой среды. Пьезоэлементы 7 и 2 располагаются вдоль трубопровода и возбуждаются от генератора 3 на частоте в несколько сотен килогерц. Каждый из пьезоэлементов попеременно с помощью переключателя сработает то излучателем, то приемником. Таким образом, ультразвуковые колебания посылаются то по потоку среды, то навстречу ему. В первом случае скорости колебаний и потока складываются, во втором случае — вычитаются. После прохождения по среде сигналы, принятые пьезоэлементами, усиливаются усилителем 5 и поступают попеременно на измерительное устройство 6. Разность фаз принятых колебаний будет пропорциональна скорости среды. Градуировка прибора выполняется для определенной среды. При использовании прибора для измерений расхода среды с другим значением скорости распространения ультразвука изменяется и градуировка. Следует отметить, что измерительные схемы для ультразвуковых датчиков довольно сложны. Заключение Целью данного реферата является изучение а также объяснений «Ультразвуковых датчиков» их видов особенностей и их применений. Использование ультразвуковых датчиков - это поиск способов удовлетворения функциональных требований средствами имеющейся компьютерной технологии с учетом заданных ограничений. Ультразвуковой датчик может использоваться для измерения скорости расстояния и угла направления, Для измерения расстояния или направления устройство использует несколько детекторов и вычисляет скорость по относительным расстояниям. Для измерения уровня. Другие области применения включают: увлажнители воздуха, гидролокаторы, медицинское ультразвуковое исследование, охранную сигнализацию, неразрушающий контроль и беспроводную зарядку. Эта технология также может обнаруживать приближающиеся объекты и отслеживать их местоположение. Ультразвукой датчик может использоваться для измерения расстояния от точки до точки путем передачи и приема дискретных пакетов ультразвука между преобразователями. Этот метод известен как сономикрометрия, при котором время прохождения ультразвукового сигнала измеряется электронным (то есть цифровым) способом и математически преобразуется в расстояние между преобразователями, предполагая, что скорость звука среды между преобразователями известна. Этот метод может быть очень точным с точки зрения временного и пространственного разрешения, поскольку измерение времени пролета может быть получено из отслеживания одного и того же падающего (принятого) сигнала либо по опорному уровню, либо по пересечению нуля. Это позволяет разрешающей способности измерений намного превышать длину волны звуковой частоты, генерируемой преобразователями Список использованных источников Брук, Карен (2020-07-22)."Советы по уходу и обращению с ультразвуковым преобразователем". Ультразвук. Проверено 2022-02-20. [Электронный ресурс] // Режим доступа: https://osensorax.ru/posiciya/ultrazvukovoj-datchik Carotenuto, Riccardo; Merenda, Massimo; Iero, Demetrio; Della Corte, Francesco G. (Июль 2019). "Ультразвуковая система для автономного трехмерного позиционирования в помещении". IEEE Transactions on Instrumentation and Measurement. 68 (7): 2507-2518. doi: 10.1109/TIM.2018.2866358. S2CID116511976. [Электронный ресурс] // Режим доступа: https://mirrobo.ru/micro/ultrazvukovye-datchiki/ Вестервельд, Ваутер Дж. (2014). Кремниевые фотонные микрокольцевые резонаторы для измерения деформации и ультразвука (доктор философии). Технологический университет Делфта. doi:10.4233/uuid:22ccedfa-545a-4a34-bd03-64a40ede90ac. ISBN9789462590793. [Электронный ресурс] // Режим доступа: http://electricalschool.info/automation/1548-ultrazvukovye-datchiki.html С.М. Лейндерс, У.Дж. Вестервельд, Дж. Позо, П.Л.М.Дж. Ван Нир, Б. Снайдер, П. О'Брайен, Х.П. Урбах, Н. де Йонг и М.Д. Вервейдж (2015). "Чувствительный оптический ультразвуковой датчик с микрообработкой (OMUS) на основе кремниевого фотонного кольцевого резонатора на акустической мембране". Научные отчеты. 5: 14328. Bibcode:2015NatSR...514328L. doi:10.1038/srep14328. PMC4585719. PMID 26392386. [Электронный ресурс] // Режим доступа: https://rusautomation.kz/datchiki_urovnya/ultrazvukovie-datchiki-urovnya Vieira, Silvio L.; Andrade, Marco A.B. (2020). "Поступательные и вращательные резонансные частоты диска в одноосном акустическом левитаторе". Дщд. 127 (22): 224901. Bibcode:2020JAP...127v4901V. doi: 10.1063/5.0007149. S2CID225744617. [Электронный ресурс] // Режим доступа: https://studme.org/356825/tehnika/ultrazvukovye_opticheskie_datchiki "Эхо-зондирование / Ранние звуковые методы". Национальное управление океанических и атмосферных исследований (NOAA). Центральная библиотека NOAA. 2006. [Электронный ресурс] // Режим доступа: https://rusautomation.ru/articles/ultrazvukovye-datchiki-urovnya-osobennosti-primeneniya/ SCHNEIDER, MICHEL (1999). "Характеристики SonoVue™". Эхокардиография. Уайли. 16 (s1):743-746. doi: 10.1111/j.1540-8175.1999.tb00144.x. ISSN 0742-2822. [Электронный ресурс] // Режим доступа: https://ruelectronics.com/elektronnye-ustrojstva/elektronnye-moduli-arduino/hc-sr04/?yclid=7186278680627827686 Шривастав, А.; Бхоги, К.; Мандал, С.; Шарад, М. (август 2019). "Адаптивная схема обнаружения аномалий низкой сложности для носимого ультразвукового исследования". IEEE Transactions on Circuits and Systems. 66 (8): 1466-1470. doi:10.1109/TCSII.2018.2881612. S2CID 117391787. [Электронный ресурс] // Режим доступа: https://uzimir.ru/news-events-reviews/tipyi-ultrazvukovyix-datchikov-i-ix-naznachenie. |