Многоконтурные САУ. Реферат по дисциплине Теория автоматического управления
 Скачать 154.17 Kb. Скачать 154.17 Kb.
|

|
Министерство науки и высшего образования Российской Федерации Федеральное государственное бюджетное образовательное учреждение высшего образования «Сибирский государственный индустриальный университет» Кафедра открытых горных работ и электромеханики Реферат по дисциплине «Теория автоматического управления» Тема: «Многоконтурные системы автоматического управления)» Выполнил: ст.гр. ГЭ-17 Удовицкий Р.О. Проверила: Пугачева Э.Е. Новокузнецк 2021 СодержаниеОсновные понятия 2 Особенности многоконтурных систем автоматического управления 4 Каскадные САУ 7 Комбинированные АСР 12 Каскадно-комбинированные АСР 14 Источники литературы 15 Основные понятия По числу контуров управления САУ делятся на одномерные (или одноконтурные) и многомерные (или многоконтурные). 1. Одномерные (одноконтурные) САУ – это системы с одной управляемой величиной У, они содержат один контур обратной связи. 2. Многомерные (многоконтурные) САУ – это системы с несколькими управляемыми величинами. Образуют несколько контуров обратных связей: помимо главной обратной связи имеют дополнительно местные обратные связи. В многомерных системах выделяют системы несвязанного управления и системы связанного управления. Системы несвязанного управления имеют несколько управляющих устройств, каждое из которых управляет одной из выходных величин. Эти устройства не имеют взаимных связей. 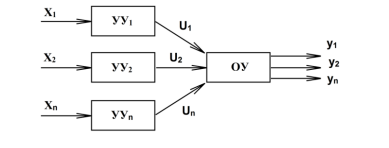 Рисунок 1 – Система несвязанного управления В системах связанного управления отдельные управляющие устройства связаны друг с другом. Такие системы позволяют существенно улучшить качественные характеристики управления 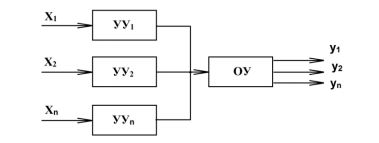 Рисунок 2 – Система связанного управления Особенности многоконтурных систем автоматического управления По функциональному назначению, а также по формальным топологическим признакам, к многоконтурным САУ относят замкнутые системы, в состав которых входят несколько контуров управления. При этом местные обратные связи могут быть жесткими и гибкими, отрицательными и положительными. Другими словами, многоконтурная система помимо основного, внешнего контура управления имеет дополнительные обратные или параллельные корректирующие связи. К этому следует добавить, что в общем случае многоконтурная система может иметь одну или несколько управляемых величин. Местные корректирующие обратные связи делятся на жесткие и гибкие. Жесткая обратная связь действует на систему как в переходном, так и в установившемся режиме, то есть Wж(0) Wж = Kж или Wж =  . .Гибкая обратная связь действует только в переходном режиме, она реализуется либо дифференцирующим, либо реальным дифференцирующим звеном: Wг = Kг или Wг =  . .Обратные связи могут быть отрицательными или положительными: 1. Отрицательные обратные связи – когда с увеличением сигнала на выходе сигнал на входе уменьшается. 2. Положительные обратные связи – когда с увеличением сигнала на выходе сигнал на входе тоже увеличивается. Причины введения дополнительных контуров коррекции могут быть различными. Это может быть линеаризация, фильтрация шумов, преобразование сигнала в соответствии с выбранным законом управления, уменьшение инерционности, направленное на повышение быстродействия САУ и др. Местные обратные связи, охватывающие несколько параллельно соединенных элементов, также могут служить для дополнительной коррекции динамики частей системы. Структура многоконтурной САУ, её характеристики и параметры отдельных звеньев определяются задачами, возлагаемыми на систему, и требованиями к качеству управления. Наиболее распространены на практике системы подчиненного управления, иначе – каскадные системы [56]. Их характерная особенность состоит в том, что каждый локальный контур является вложенным в основной контур управления. Такая структура многоконтурной системы автоматического управления является практически типовой для электромеханических САУ, так как она охватывает более 70% всех многоконтурных систем. В общем виде такая структурная схема такой системы представлена на рисунке 3. 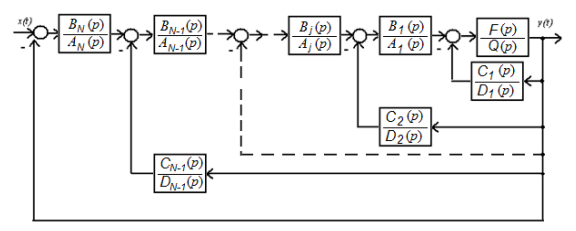 Рисунок 3 – Структурная схема многоконтурной САУ П в цепи обратной связи. Передаточная функция такой системы, подлежащей синтезу, имеет вид: Из этого выражения видно, что решение задачи связано с поиском значений неизвестных коэффициентов корректирующих средств, число которых определяется числом контуров. На практике, как правило, используют не более трех контуров управления. Поэтому в дальнейшем будем ограничиться именно такими структурами, которые, во-первых, имеют не более трех контуров и, вовторых, охватывают подавляющее большинство исполнительных систем управления. Каскадные САУ В каскадных системах при регулировании основной технологической величины в объекте с большим запаздыванием используются также вспомогательные величины, реагирующие на изменение основных возмущений объекта и регулирующего воздействия с меньшим запаздыванием. В таких случаях стабилизация вспомогательных величин способствует более качественному регулированию основной величины. Каскадная система состоит из нескольких контуров регулирования, каждый из которых регулирует свою технологическую (основную или вспомогательную) величину. Однако применение каскадных схем эффективно только в том случае, когда запаздывание в контуре регулирования основной величины существенно больше, чем в контуре регулирования вспомогательной величины. При автоматизации химико-технологических объектов чаще всего используют двухконтурные каскадные системы. Структурная схема двухконтурной системы приведена на рис. 4. В объекте регулирования ОР на основную у и вспомогательную у1 технологические величины воздействуют регулирующая величина х и основное (наиболее сильное и быстро изменяющееся) возмущение z1. На величину у действует также небольшое и редкое возмущение z. Двухконтурная каскадная система имеет вспомогательный (стабилизирующий) контур регулирования и основной (корректирующий) контур. В стабилизирующий контур входит объект ОР (канал х → у1) и стабилизирующий регулятор AP1, вырабатывающий регулирующее воздействие х. Корректирующий контур регулирования состоит из объекта (канал х → у) и корректирующего регулятора АР с независимым заданием u. На вход регулятора АР поступает основная регулируемая величина у, а на вход регулятора AP1 - вспомогательная величина у1. Выходная величина х1 регулятора АР направляется на регулятор AP1 для изменения его задания. Стабилизирующий контур предназначен для регулирования вспомогательной величины у1, а корректирующий - основной величины у. Обычно применяют следующие типы каскадных АСР: П - ПИ, ПИ - ПИ, ПИ - ПИД (первый регулятор является стабилизирующим, а второй - корректирующим). Возмущение z1 приводит к изменению сначала вспомогательной величины y1, а затем — основной величины у. Поэтому стабилизирующий контур регулирования быстрее, чем корректирующий, вступит в работу и выработает регулирующее воздейстствие, которое частично скомпенсирует отклонение величины у от заданного значения u. Нескомпенсированное отклонение величины у приведет в действие корректирующий контур регулирования, который постепенно скомпенсирует это отклонение. Влияние возмущения z на величину у подавляется корректирующим контуром регулирования. При этом стабилизирующий контур регулирования является быстродействующим, а корректирующий — медленнодействующим. Таким образом, применение стабилизирующего контура регулирования приводит к значительному повышению качества регулирования основной технологической величины. Для иллюстрации этого положения на рис. 5 приведены сравнительные графики переходных процессов в каскадной системе, с П — ПИ - регуляторами (кривая 1) и одноконтурной системе с ПИ - регулятором (кривая 2), полученные при нанесении одинакового возмущения z1 на один и тот же объект. В одном и другом случаях переходные процессы носят колебательный характер и не имеют статической ошибки регулирования. В то же время при использовании каскадной системы динамическая ошибка и время регулирования имеют меньшие значения. Уменьшается в несколько раз и интегральная квадратичная ошибка регулирования. 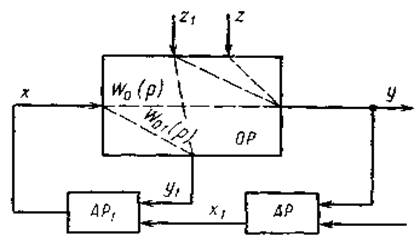 Рис. 4. Структурная схема двухконтурной каскадной системы: ОР - объект регулирования; АР - корректирующий регулятор; AP1 - стабилизирующий регулятор. Отметим, что качество регулирования существенно улучшается с уменьшением соотношения времени запаздывания в стабилизирующем ( При реализации каскадных систем следует учитывать, что у многих объектов область технологически допустимых значений вспомогательной регулируемой величины у1, которая задается корректирующим регулятором, ограничена и поэтому в схему необходимо вводить устройства для ограничения величины задания стабилизирующего регулятора. 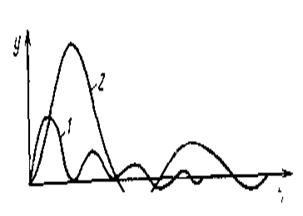 Рис. 5. Переходные процессы в каскадной П - ПИ системе (кривая 1) и одноконтурной ПИ системе (кривая 2) при одинаковом ступенчатом возмущении z1. Примером может служить двухконтурная система регулирования температуры низа ректификационной колонны, поддерживаемая изменением подачи греющего пара в кипятильник (рис. 6). 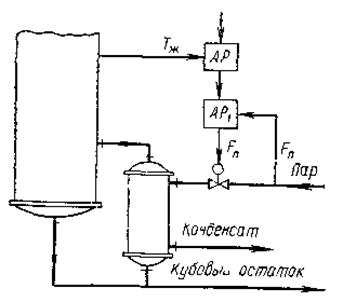 Рис. 6 – Схема двухконтурной каскадной АСР температуры в отгонной части ректификационной колонны. Кипятильник представляет собой инерционный объект с большим запаздыванием. В таком случае применение одноконтурного регулирования температуры с воздействием на подачу пара в кипятильник обычно не обеспечивает высокого качества регулирования. Поэтому в схему вводят стабилизирующий контур регулирования расхода греющего пара; обладая большим быстродействием, этот контур компенсирует возмущения по изменению как расхода, так и давления греющего пара. Остальные возмущения компенсируются регулятором температуры, который воздействует на задатчик регулятора расхода. 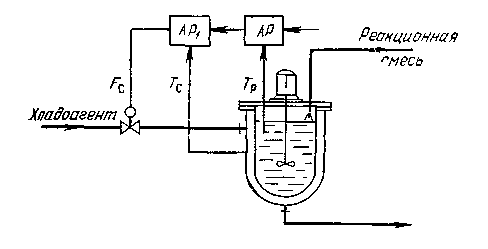 Рис. 7 – Схема двухконтурной каскадной АСР температуры в химическом реакторе. На рис. 7 приведена двухконтурная АСР температуры в химическом реакторе посредством изменения расхода охлаждающей жидкости в рубашке реактора. С целью обеспечения более высокого качества регулирования, в схему введен стабилизирующий контур, в который входит регулятор АР1 поддерживающий температуру охлаждающей жидкости Тс в рубашке реактора. Значение этой температуры задается регулятором АР корректирующего контура регулирования температуры реакционной смеси Тр в реакторе. Выбор типов стабилизирующего и корректирующего регуляторов каскадных АСР, а также определение оптимальных значений их настроечных параметров представляет собой более сложную задачу, чем в случае одноконтурных АСР. Так как по инерционности корректирующий контур существенно превосходит стабилизирующий, можно предположить, что в стабилизирующем контуре заканчивается переходный процесс раньше, чем он возникает в корректирующем. При этом условии выбор регуляторов и расчет их настроечных параметров можно проводить раздельно, как для двух одноконтурных АСР. Комбинированные АСР Комбинированные АСР реализуют комбинированный принцип регулирования. Структурная схема такой системы, учитывающей одно возмущение, приведена на рис. 8. Текущие значения регулируемой величины у и возмущения z1 подаются соответственно через измерительные преобразователи ИП и ИПВ на автоматические регуляторы АР и АРВ. После алгебраического суммирования выходы этих регуляторов направляются на вход объекта в качестве управляемой величины х. Воздействие на объект осуществляется по двум каналам: разомкнутому и замкнутому. С помощью разомкнутого канала обеспечивается быстрое воздействие на объект еще до отклонения регулируемой технологической величины от заданного значения, а с помощью замкнутого канала обратной связи осуществляется качественное поддержание регулируемой величины на заданном значении посредством текущего контроля ошибки регулирования. 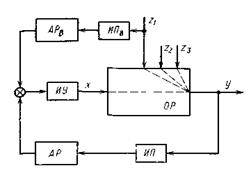 Рис. 8 – Структурная схема комбинированной системы регулирования: ОР — объект регулирования; ИП, ИПВ —измерительные преобразователи; АР — автоматический регулятор; АРВ —автоматический регулятор по возмущению; ИУ — исполнительное устройство. Пример комбинированной системы приведен на рис. VI-16. Система предназначена для регулирования температуры на контрольной тарелке укрепляющей части ректификационной колонны, которое осуществляется регулятором АР, изменяющим подачу флегмы в колонну. На расход флегмы также воздействует контур регулирования по возмущению (регулятор АРВ), компенсирующий основное возмущение объекта — изменение состава сырья колонны.  Рис. 9 – Схема комбинированной системы регулирования температуры верха ректификационной колонны, учитывающая изменение состава исходной смеси. Каскадно-комбинированные АСР В некоторых случаях применяют также каскадно-комбинированные системы регулирования, имеющие, как минимум, три контура: стабилизирующий, корректирующий и осуществляющий регулирование по возмущению (рис. 10,а).  Рис 10 – Структурная (а) и принципиальная (б) схемы каскадно-комбинированной системы регулирования. Так при регулировании состава паров дистиллята, отводимых из верха колонны (регулятор АР) для повышения качества регулирования используют быстродействующий стабилизирующий контур регулирования расхода флегмы в колонну (регулятор AP1), а также контур регулирования по возмущению (регулятор АРВ), учитывающий изменение состава сырья, поступающего в колонну (рис 10,б). Источники литературыТеория автоматического управления / Под ред. А.А.Воронова - М.: Высшая школа, 1986, ч. 1, 2. Теория автоматического управления / Под ред. А.В.Нетушила - М.: Высшая школа, 1983. – 432 с. Попов Е.П. Теория нелинейных систем автоматического регулирования и управления. М.: Наука, 1988. 304 с Власов, К.П. Теория автоматического управления. Основные положения. Примеры расчета / К.П. Власов. – М. : Гуманитарный центр, 2013. – 540 с. |