черновой реферат роботы в машиностроении. Реферат применение промышленных роботов в машиностроении по дисциплине Введение в профессию Исполнитель
 Скачать 1.38 Mb. Скачать 1.38 Mb.
|

|
Федеральное государственное автономное образовательное учреждение высшего профессионального образования «Дальневосточный федеральный университет» ИНЖЕНЕРНАЯ ШКОЛА Кафедра технологий промышленного производства РЕФЕРАТ Применение промышленных роботов в машиностроении по дисциплине «Введение в профессию» Исполнитель: студент группы Б3120 Мурсалимов Владимир Александрович _________________ Научный руководитель к.ф.-м.н., доцент Юрчик Федор Дмитриевич __________________________ г. Владивосток 2017 План реферата:
ВВЕДЕНИЕДолгое время существовало два различных, обособившихся друг от друга вида производства:
Соответственно, вполне логичной идеей усовершенствовать производство – добавить третий производственный режим, который бы заменил в большинстве случаев предыдущие два, при котором бы производство стало максимально автоматизированным, и в то же время достаточно гибким, т.е. предназначенным для выпуска разнообразной продукции. Благодаря научно-технологическому прогрессу, эта задача была решена, внедрением электронно-вычислительных систем управления и промышленных роботов. Считается, что это одно из самых крупных достижений промышленности, в т.ч. машиностроения. Многие современные машиностроительные предприятия заинтересованы во внедрении роботов в производство, в первую очередь с целью сократить расходы, и снизить себестоимость готовых изделий. Подобный переход имеет высокую окупаемость в связи с тем, что роботам нет необходимости выплачивать зарплату, отпуск раз в год, не нужно предоставлять социальные пакеты, некоторые способны работать круглосуточно, и т.д. Также использование роботизированных линий производства существенно повышает качество, точность, скорость. 2 История создания промышленных роботов и манипуляторовИдея подобным образом автоматизировать производство зародилась еще в середине XX века, когда извлечение энергии из атомных ядер активно начало развиваться. В 1947 году были созданы первые манипуляторы, предназначенные для точного повторения движений рук оператора. Например, с помощью таких устройств можно было без опасений передвигать радиоактивные вещества. Однако с помощью этого манипулятора вращать гаечные ключи, выполнять позиционирование объектов на рабочей плоскости было затруднено, поскольку механика этих машин не предполагала использование механизма обратной связи с человеком. Уже в 1948 на манипуляторе, представленным компанией «General Electric», обратная связь присутствовала, и с тех пор оператор мог воспринимать усилие, оказываемое на объекты при схватывании или перемещении манипулятором объекта. Первые экземпляры роботов, вышедшие в массовое производство, в том числе и в машиностроение, стали появляться только после 1950-ых годов. В 1954 году американский инженер Джордж Девол разработал новую версию манипулятора с заменяемыми перфокартами, позволяющие сменить режим работы устройства, после чего запатентовал свое изобретение как «автоматическое программируемое устройство для переноса предметов», а через 2 года вместе с Джозефом Энгельбергомом запустили впервые в мире компанию по производству промышленных роботов. Позже, в 1959 году фирма «Консолидейтед Корпорейшн» выпустила идеи по созданию роботов с числовым программным управлением (ЧПУ), а в 60-61 годах в манипуляторах фирм «Transferrobot» и «Eleximan» применялась эта технология.[1]. 3 Манипуляторы и их классификацииОсновным видом роботов, рассматриваемых в этом реферате, принимающих непосредственное участие в машиностроении, являются манипуляторы. Они же занимают лидирующие положение по количеству использования. Составными частями подобного механизма служит программируемая под различные нужды САУ (система автоматического управления) и механическая составляющая, позволяющая «механической руке» выполнять различные работы в нескольких степенях свободы. Технические возможности их впечатляют: грузоподъемность некоторых экземпляров доходит до 2 тонн с 5-метровым радиусом воздействия и практически неограниченной сложностью выполняемых действий, ограниченной лишь возможностями программистов. Программируется этот вид роботов, как правило, на языках C, C++, Pascal, Assembler, что позволяет с наименьшими затратами перевести робота в другой режим производства. Еще одно преимущество манипуляторов – довольно широкий диапазон рабочих температур, что расширяет область их применения.[2][7] Классификации манипуляторов:
[4] С течением времени в промышленности вводились в эксплуатацию все новые и новые виды роботов. Ниже описаны самые популярные из них, применяемых в машиностроении: [4]. 4.1 Роботы сварщикиРоботы сварщики есть комплекс уникальных компонентов и технологий, направленных на сварку металлических компонентов изделия. Для выполнения сварочных задач роботы используют следующие виды сварки:
Эти устройства используются для сварки угловых, стыковых, прямолинейных, кольцевых и других видов швов, требующих высочайшей точности. Их рабочий цикл программируется и задается отдельно. Внедрение сварочных манипуляторов носит дает неоспоримые преимущества: повышение скорости, объёма, качества сварки и однозначно является оправданным в машиностроении.[5].  4.2 Покрасочные роботыВ машиностроении неотъемлемым видом работ является обработка поверхностей перед финальной сборкой. Это может быть грунтовка, предшествующая покраске, или нанесение антикоррозийных покрытий. С этими и другими аналогичными задачами справляется покрасочный-робот. Самые современные оснащаются пульверизаторами для окраски деталей, поворотными столами и 7-8 осевыми манипуляторами для достижения максимально возможной точности, шлангами повышенной гибкости и прочности для защиты от механических повреждений, излома, скручиваний.[9].  4.3 Роботы резчикиВ машиностроительных предприятиях, а также в предприятиях, непосредственно связанных с обработкой металла, пользуются спросом манипуляторы для резки металлов. Современные роботы-резчики оснащаются системой отслеживания положения заготовки. Важный элемент этого устройства – датчик контакта головки интсрумента с заготовкой. От его работы точность позиционирования может достигать 0,05 мм, чего вполне достаточно для обработки даже небольших деталей и деталей, требовательных к точности.[8] 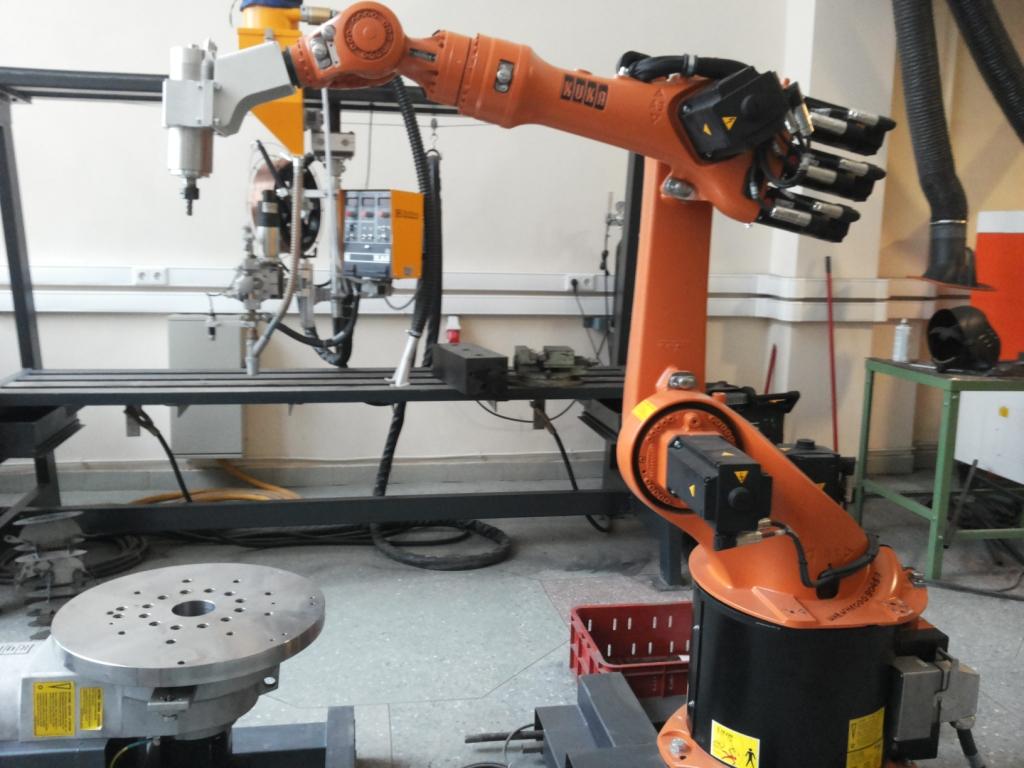 4.4 Роботы-сборщикиИсследования показывают, до 25% всего времени производства занимают сборочные операции. Промышленные манипуляторы, занятые автоматической сборкой изделий, как правило, имеют 6 степеней свободы, которые приводятся в движение благодаря системе сервоприводов, однако их полный потенциал раскрывается при использовании полностью автоматизированной линии производства. Несмотря на это множество операций все еще сложны для выполнения роботами, поэтому выполняются вручную, но большинство простых и многократно повторяющихся операций идеальны для выполнения роботами. [8] 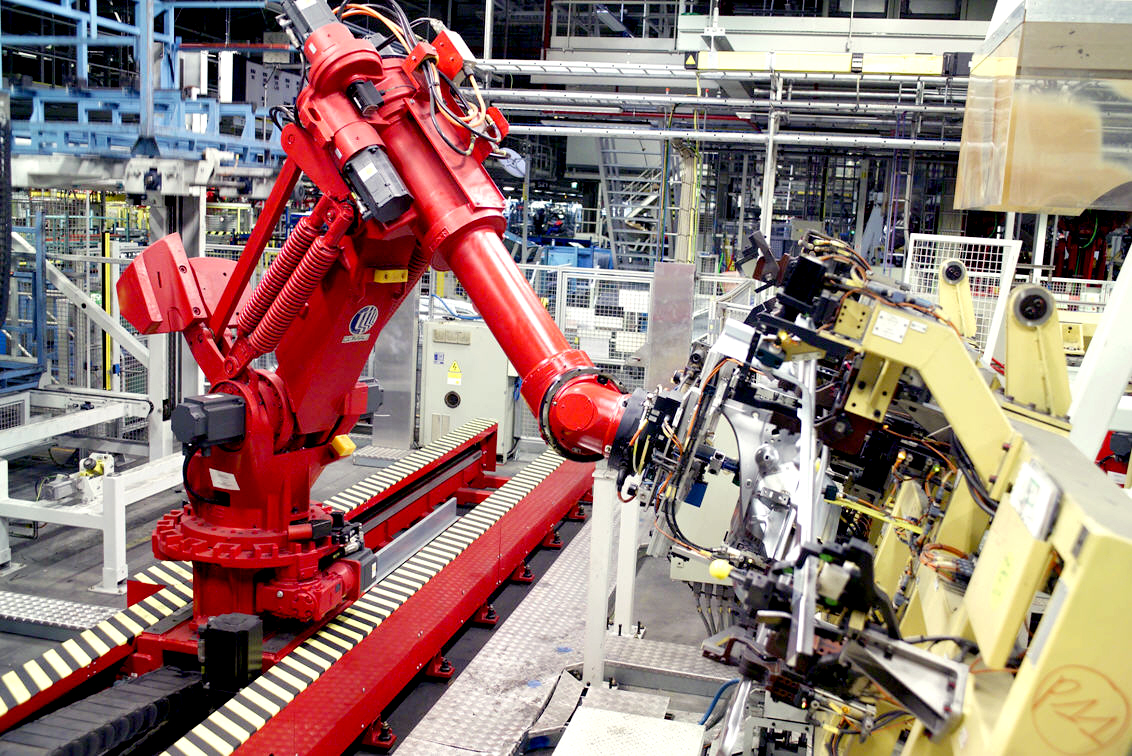 4.5 Роботы-сверлильщикиОперацию сверления, как правило, сейчас производят на станке. И при использовании робота-манипулятора рабочий инструмент закрепляют в захватном устройстве, которое перемещается над заготовкой, высверливая отверстия в необходимых местах. Преимущество использования робота в этом наблюдается, когда приходится работать с крупногабаритными деталями и когда нужно высверливать большое количество отверстий. Например, подобные роботы активно используются в авиастроении, где операции сверления играют важную роль: перед вставкой клепок на одном экземпляре необходимо проделать тысячи отверстий, и неудивительно, что роботы-сверлильщики нашли там свое применение. [8]  4.6 Роботы для бесконтактной обработкиРоботы, из-за своей ограниченной твердости и жесткости, не всегда могут применяться для резки твердых материалов резанием, поэтому были изобретены роботы для бесконтактной обработки материалов. В частности, для этого используется лазер. В захватном устройстве робота располагается генератор высокоэнергетического когерентного излучения, который направлен на заготовку. Лазер позволяет добиться высочайшей точности при обработке стали, алюминия, других металлов. Программой задается траектория движения лазера, а также мощность его излучения, в зависимости от толщины обрабатываемой детали. Еще одним способ осуществить бесконтактную резку – применение струи жидкости. Такой метод исключает износ инструмента, а также повышает качество резки. [6]. 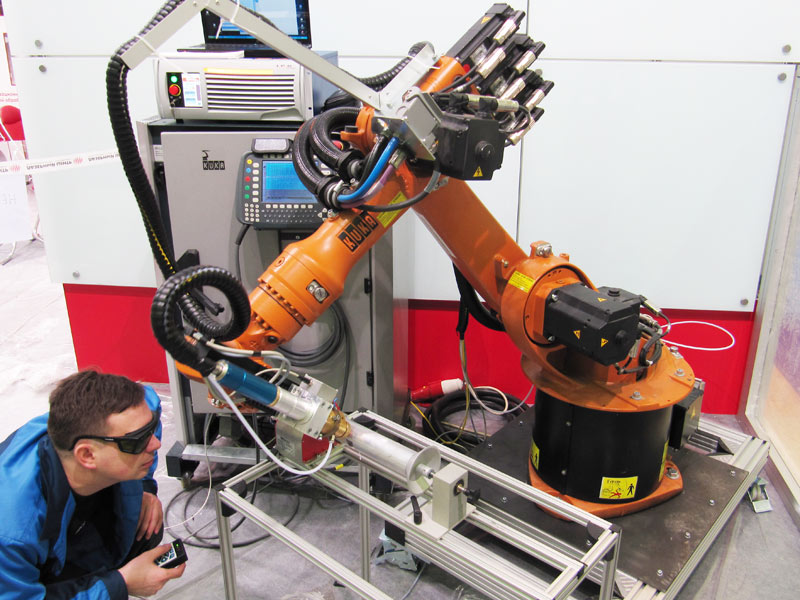 ЗаключениеКак видно, темпы роботостроения и применяемости промышленных роботов в машиностроении неуклонно растет, так же, как и на заре их развития. На текущий момент множество видов однообразных и трудоемких работ, до этого выполняемых человеком, заменено роботами. Также, применение промышленных роботов дает преимущество при производстве, в сравнении с конкурентами. Снижение энергозатрат, процент брака, повышение экологичности производства, прибыли – в этом положительные стороны применение роботов, поэтому настолько популярно их распространение. Многие современные машиностроительные предприятия заинтересованы во внедрении роботов в производство, в первую очередь с целью сократить расходы, и снизить себестоимость готовых изделий. Подобный переход имеет высокую окупаемость в связи с тем, что роботам нет необходимости выплачивать зарплату, отпуск раз в год, не нужно предоставлять социальные пакеты, некоторые способны работать круглосуточно, и т.д. Также использование роботизированных линий производства существенно повышает качество, точность, скорость. Используемые источники1. encyclopaedia.bid/википедия/Промышленный_робот 2. http://fb.ru/article/162809/promyishlennyiy-robot-robotyi-na-proizvodstve-avtomatyi-robotyi 3. https://studfiles.net/preview/5331763/ 4. https://studfiles.net/preview/5331764/ 5. https://metallmaster.org/shkola-svarschika/svarochnyjj-robot.html#i 6. http://rus-robot.com/primeneniya/beskontaktnaya_obrabotka_lazernaya_rezka/ 7. Ю. Г. Козырев. Захватные устройства и инструменты промышленных роботов. 8. http://bibliofond.ru/view.aspx?id=38738 9. http://www.alfarobot.ru/articles/покрасочные-роботы/ |