Блокнот СОБ. Руководство по боевой работе старшего офицера батареи Алматы 1999
 Скачать 2.65 Mb. Скачать 2.65 Mb.
|

С Х Е М Анепосредственного охранения и   самообороны огневых взводов на огневой позиции самообороны огневых взводов на огневой позиции С Х Е М Аогневой позиции(  вариант) вариант) 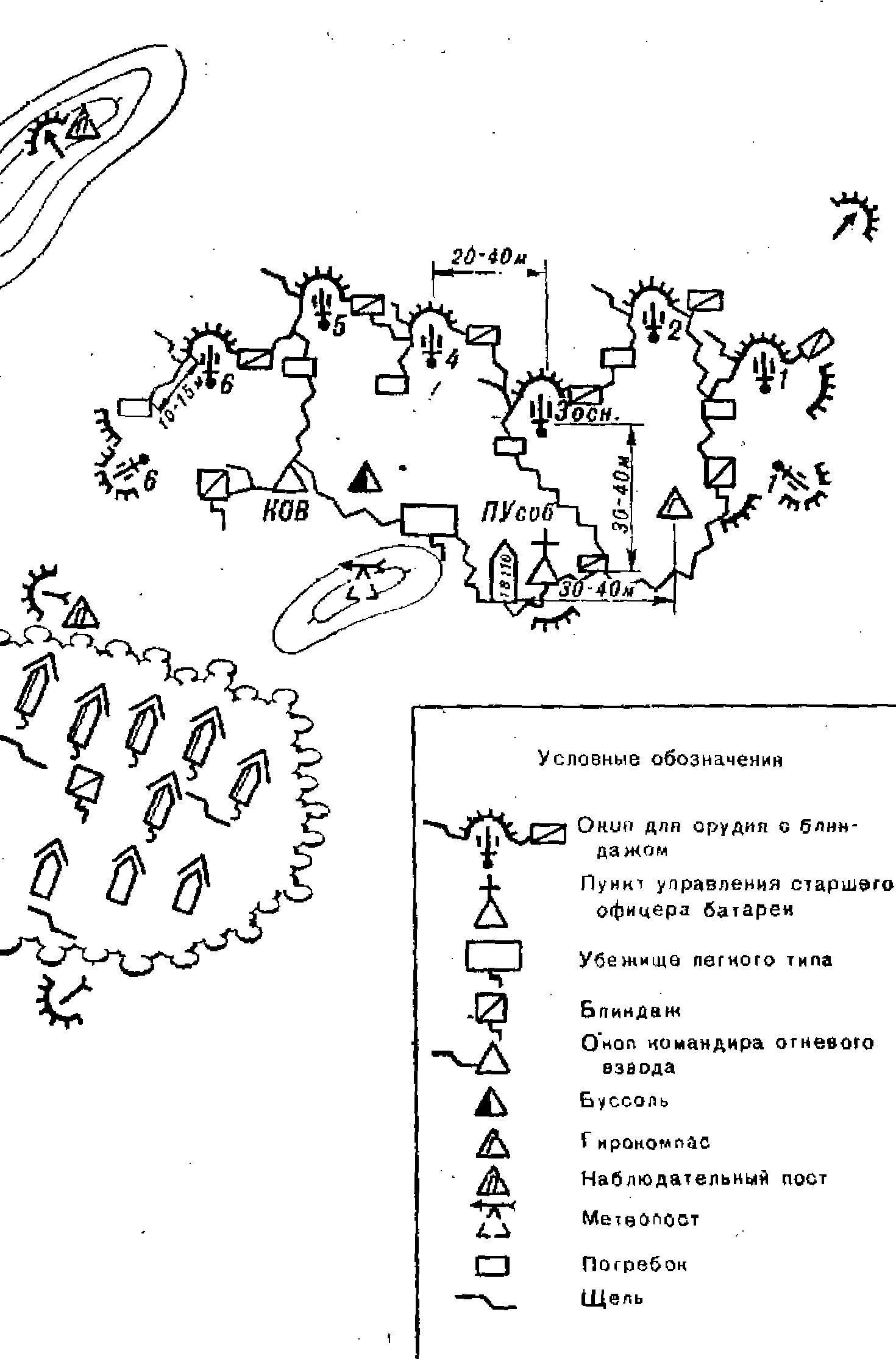 ОСНОВНЫЕ СПОСОБЫ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОГНЕВОЙ ПОЗИЦИИ СИЛАМИ БАТАРЕИ Полярный способ Определить дирекционный угол α с контурной точки Кт(координаты которой сняты с карты) на ОН (смотри рисунок). Измерить расстояние dмежду ОП и контурной точкой. Определить приращения координат ΔХ и ΔУ. Р 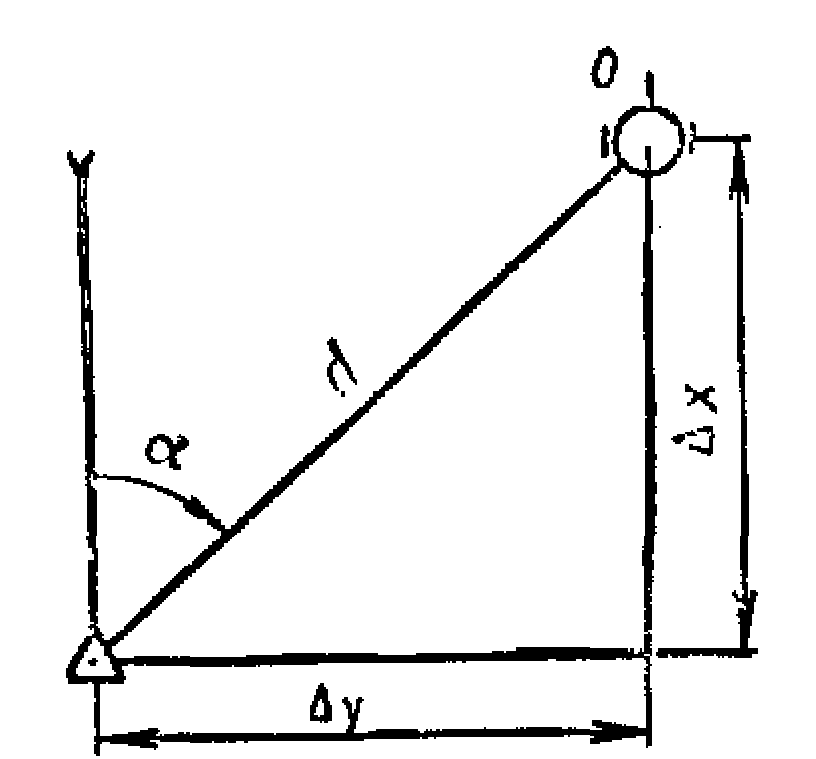 ассчитать координаты ОП: Хоп = Хкт + ΔХ Уoп =Укт + ΔУ Дирекционный угол α определяют с помощью буссоли ПАБили передают от известного ориентирного направления. Расстояние d определяют по дальномерной рейке, с помощью короткой (вспомогательной) базы или другим способом (промером). Приращения координат ΔХ и ΔУопределяют с помощью номограммы НИХ, таблиц приращений координат или другими способами. При определении расстояния по короткой (вспомогательной) базе длина должна быть не менее 1\10 определяемого расстояния. Вспомогательную базу располагают под прямым углом к измеряемой линии, ее длина измеряется мерной лентой (шнуром) и берется кратной 10м. Параллактический угол или его дополнение до 90о измеряют двумя приемами. Искомое расстояние определяется по таблицам (таблица для определения расстояний по вспомогательной базе, таблицы для определения расстояний при засечке на короткой базе)или вычисляется по формуле: d =Б Сtgγ, где Б - длина базы, м; γ - измеренный параллактический угол. Для определения dможет быть использован счислитель. Ходы Ход в две-три стороны применяют в случаях, когда имеются координаты одной контурной точки, но она не видна сОП. Последовательность работы может быть такой. Установить буссоль на вспомогательной точке А и определить дирекционный угол на контурную точку Кт, координаты которой известны(смотри рисунок). Изменить полученное значение дирекционного угла α1 на 30-00. Определить дирекционный угол α2 с вспомогательной точки А на ОП (на точку О). Измерить дальности от вспомогательной точки А до точек Кт и О (d1, d2). О Ха = Хкт + ΔХа, Уа = Укт + ΔУа пределить приращения координат ΔХа и ΔУа. Рассчитать координаты вспомогательной точки А. О 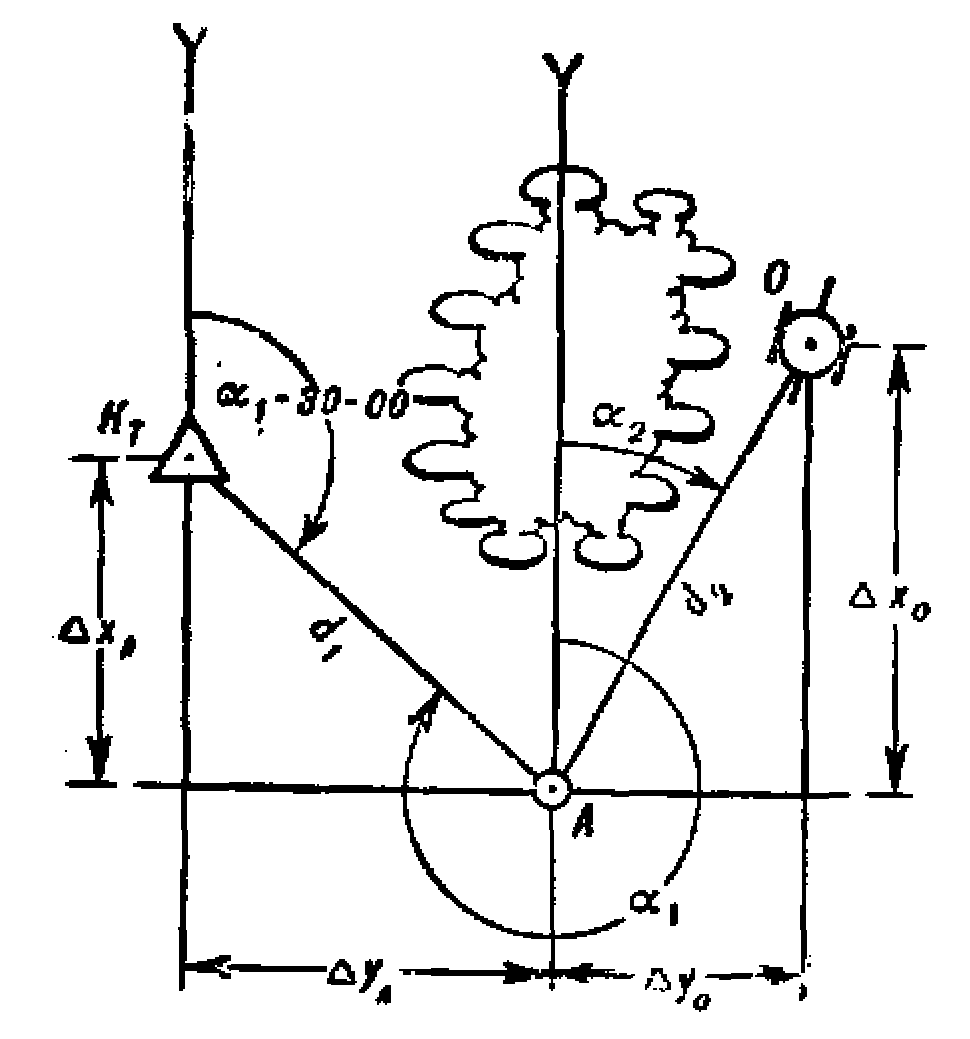 пределить приращение координат ΔХо и ΔУо. Рассчитать координаты ОП (точки 0): Хо=Ха + ΔХо, Уо=Уа + ΔУо. При прокладке хода в три стороны дополнительно определяют координаты второй промежуточной точки и после этого-координаты ОП. Для выполнения работ при прокладке хода используют те же средства, что и при определении координат ОП полярным способом. Засечки При определении координат ОП этим способом могут применяться следующие приемы: засечка по обратным дирекционным углам; способ БОЛОТОВА; засечка по изморенным расстояниям. Засечка по обратным дирекционным углам Выбрать три ближайших местных предмета, обозначенных на карте (аэроснимке). Углы между направлениями на эти точки должны быть не менее 5-00. Установить буссоль на привязываемой точке и определить дирекционные углы на выбранные ранее местные предметы. Изменить каждый дирекционный угол по выбранным местным предметам на 30-00. Построить на планшете (карте, ПУО, аэроснимке) полученные величины обратных дирекционных углов при соответствующих им точках карты (аэроснимка) и прочертить прямые линий (смотри рисунок). В пересечении линий снять координаты привязываемой точки 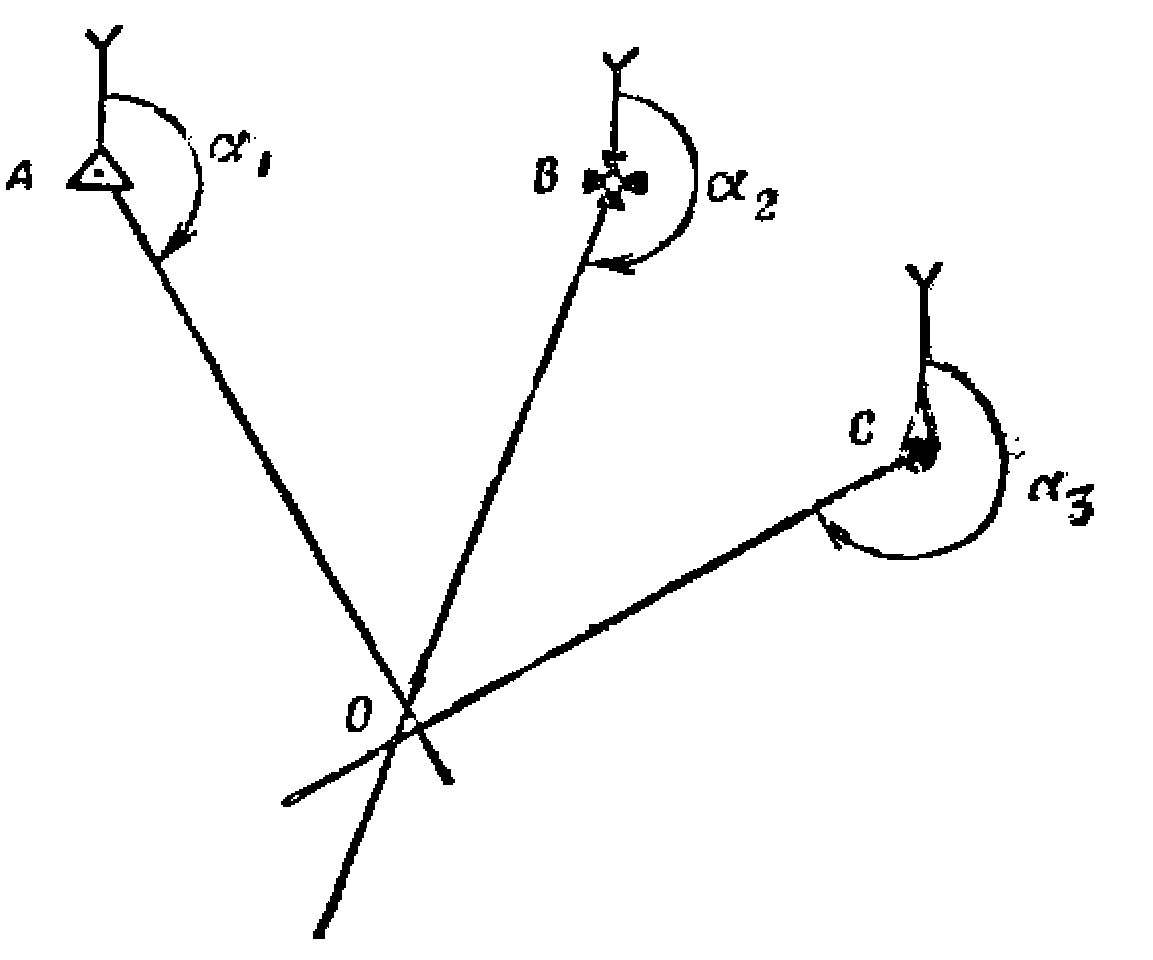 Засечка считается выполненной правильно, если наибольшая сторона треугольника погрешностей не превышает 3 мм. За положение определяемой точки берут центр треугольника погрешностей, который накалывают на глаз. Способ Болотова Выбрать четыре местных предмета, обозначенных на карте (четвертую точку берут для контроля). С 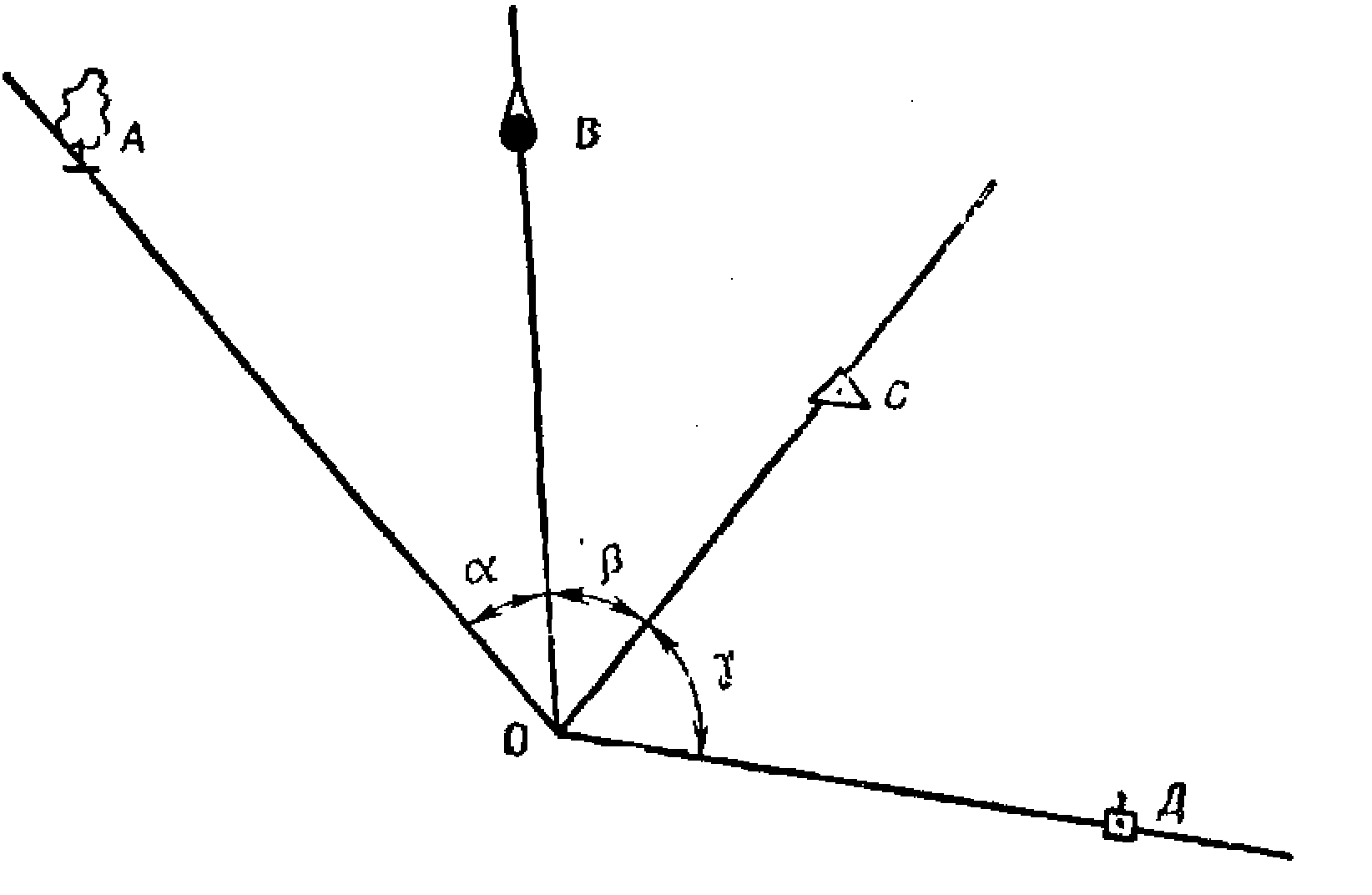 На листе кальки наколоть точку О и при ней построить углы α, β, γ и прочертить направления. Обозначить направления названиями местных предметов или буквами А,В, С, Д. помощью буссоли (панорамы), установленной на привязываемой точке, измерить углы α, β, γ между направлениями на выбранные местные предметы (смотри рисунок). Наложить на кальку на карту (аэроснимок)и, поворачивая ее, совместить направления на кальке с соответствующими точками карты(аэроснимка). Переколоть точку Ос кальки на карту(аэроснимок)и определить ее координаты. Засечка по измененным расстояниям Выбрать три ближайших местных предмета, координаты которых известны (обозначены на карте или аэроснимке). Измерить расстояния d1, d2 и d3 от привязываемой точки до выбранных местных предметов. На планшет (карту, ПУО) нанести по известным координатам контурные точки и прочертить с них циркулем дуги радиусами, равными измеренным расстояниям в масштабе карты (рис. 5). Н 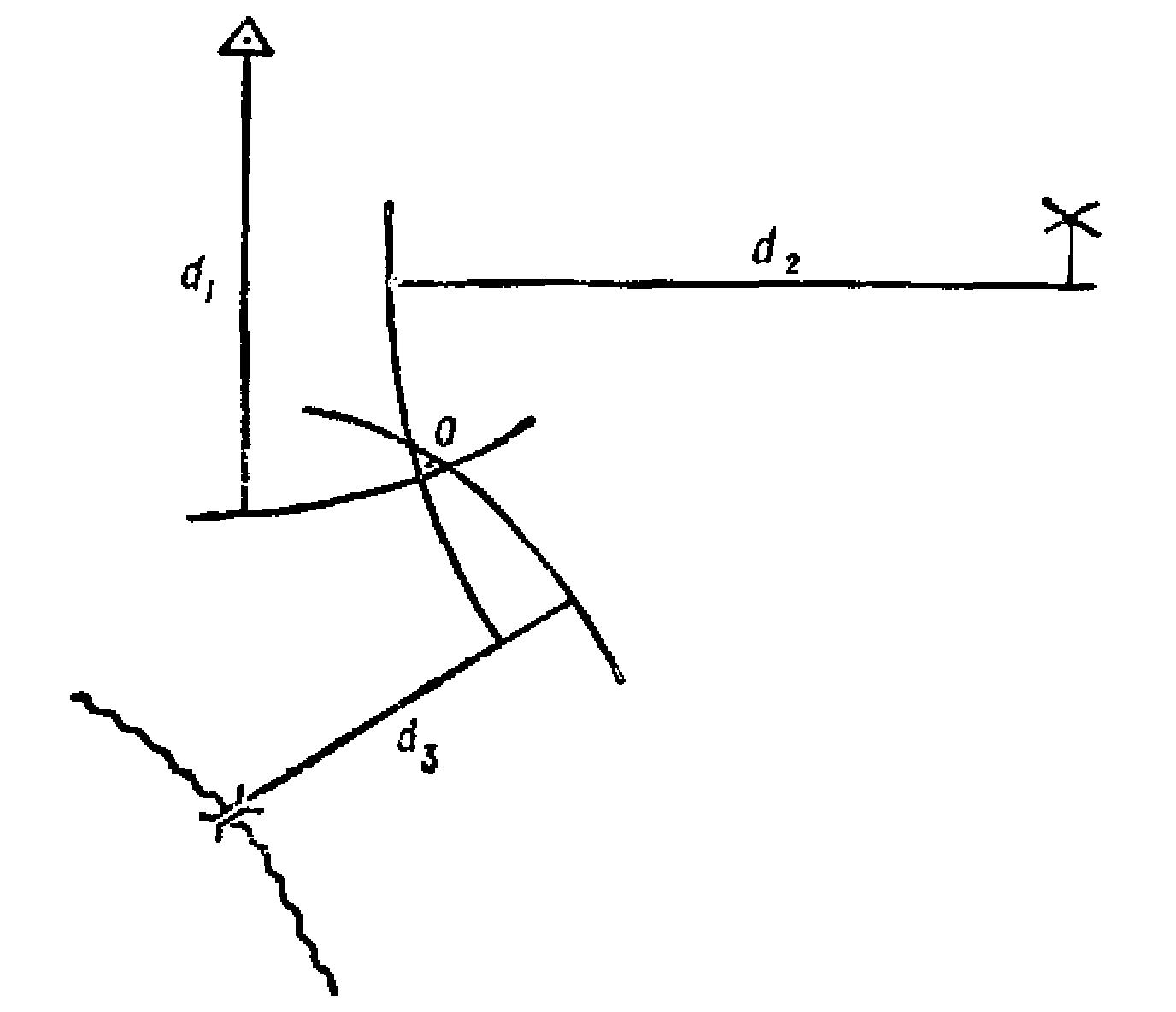 Точка считается определенной правильно, если наибольшая сторона треугольника погрешностей не превышает 3 мм а пересечении дуг (в центре треугольника погрешностей)нанести привязываемую точку. КОНТРОЛЬ ТОПОГЕОДЕЗИЧЕСКОЙ ПРИВЯЗКИКонтроль топогеодезической привязки заключается в повторном определении координат привязываемых точек, их абсолютных высот и дирекционных углов ориентирных направлений с использованием, как правило, других исходных данных, приборов или способов работ. |