сеема бўйча вафлили двигателларни. Схема бўйича валфли двигател тиристор калити. Схема бйича валфли двигател тиристор калитисинхрон двигател
 Скачать 193.69 Kb. Скачать 193.69 Kb.
|

|
Схема бўйича валфли двигател тиристор калити-синхрон двигател Ўрта ва юқори қувватли валфли двигателда одатда електромагнит қўзғалиш билан анъанавий дизайндаги синхрон моторлар ишлатилади. Юқори қувватли двигателларда stator кучланиши 6,0 ёки 10,0 кв бўлганлиги сабабли, валф калити сифатида бошқариладиган ректификатор ВТХ ва inverter ВТ2 дан иборат тиристор конвертори ишлатилади (Фиг. 7.10). Инвертор rotor др нинг позиция датчикларидан ёқилган калит функцияларини бажаради. Тиристорлар ярим бошқариладиган қурилмалар бўлгани учун, inverter роторнинг айланадиган електромагнит майдони томонидан stator сариқларида қўзғатилган двигателнинг ЕМФ туфайли ёқилган қарам сифатида ишлайди. Motor қўзғатувчи ВТЛ томонидан қўзғалади. 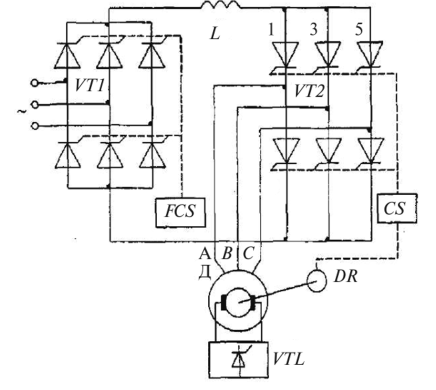 Шакл. 7.10. Тиристорли калит билан валфли двигател Двигател томонидан яратилган moment иккита оқимнинг ўзаро таъсири билан белгиланади: stator сариқларидаги оқимлар томонидан яратилган stator Фр ва қўзғалиш сариғидаги оқим томонидан яратилган rotor Ф0: бу ерда 0 л-stator ва rotor оқимлари векторлари орасидаги фазовий бурчак. Статорнинг магнит оқими роторни айланишга интилади, шунда rotor оқими stator оқими йўналишига тўғри келади. Rotor чулғамида яратилган енг катта moment оқим векторлари орасидаги бурчак 90 га тенг бўладиўқувчи векторлар яқинлашган сари нолга камаяди. Бу қарама-қаршилик 7.11-расмда кўрсатилган.  Шакл. 7.11. Вана двигател моментининг stator ва rotor оқим векторлари орасидаги бурчакка боғлиқлиги Двигател режимига мос келадиган оқим векторларининг фазовий диаграммасини кўриб чиқинг (жуфт қутблар сони билан рп = 1). Ҳозирда 3 ва 4 тиристорлар ёқилган дейлик (расмдаги диаграмага қаранг. 7.10). Кейин оқим фазавий ўраш орқали л фазавий ўраш орқали тескари йўналишда ўтади, натижада статорнинг МДС вектори фазода Ф3 ҳолатини егаллайди (расм. 7.12). Агар rotor шу дақиқада кўрсатилган позицияни егалласа шакл. 7.13, кейин motor мувофиқ ривожланади (7.13) rotor соат мили айланади остидан максимал moment. 0 бурчаги камайганда, moment камаяди. Rotor 30 белгиланганда, МДС статорининг натижавий вектори Ф4 ҳолатини олиши учун двигател фазаларидаги токни алмаштириш керак (сек.7.12). Бунинг учун тиристор 3 ни ўчиринг ва тиристор 5 ни ёқинг. Ва кейин сиз тиристорларни рақамларининг ўсиш тартибида алмаштиришингиз керак. 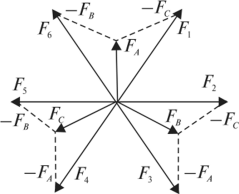 Шакл.7.12. Stator саргилари томонидан яратилган оқимларнинг фазовий ҳолати: Ф1—Ф4-статорнинг натижавий МДС; ФА, ФБ, Фc - статорнинг фазавий саргилари МДС 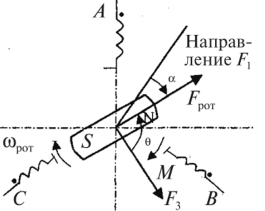 Шакл.7.13. Stator МДС нинг rotor оқимига нисбатан фазовий диаграммаси: Фп0т-rotor МДС; сор0т-rotor тезлиги Фазавий коммутация rotor ҳолат датчиги ДР дан бошқариладиган тиристорли калит Л2 орқали амалга оширилади; шу билан бирга 0 бурчак 90 ичида ушланиб турилади30ъзгарувчанликка ега бўлган моментнинг максимал қийматига мос келади. РП = 1 да роторнинг битта айланишида олтита калит бўлиши керак, бунинг натижасида stator МДС тўлиқ инқилоб қилади (расмга қаранг. 7.12). Инвертор тиристорларининг барқарор коммутациясини таъминлаш учун уларнинг очилиш бурчагини илгариланма (3 > 1дақиқа моментнинг маълум пасайишига олиб келадигаи= 0 " (0-|3). ДC палласида сезиларли индуктивликка ега бўлган бўғувчи Л нинг киритилиши туфайли ВТ1-ВТ2 конвертори оқим манбаи сифатида ишлайди, бу бошқариладиган ректификаторнинг чиқиш кучланишини импулс-фазали тартибга солиш билан тартибга солинади ВТ1: 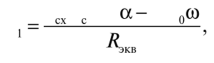 бу ерда Р3КБ-stator ўраш палласининг еквивалент қаршилиги; Уc-ректификатор таъминот кучланиши; Ф0-қўзғалиш ўраши натижасида ҳосил бўлган rotor оқими. Жорий қийматни созлаш орқали сиз двигател томонидан ишлаб чиқилган моментни ўзгартиришингиз мумкин. Ушбу турдаги драйвларда тезликни бошқариш одатда ташқи тезликни бошқариш палласини киритиш орқали амалга оширилади (анжир. 7.14). Бу ҳолда, valve motor механик хусусиятлари (Фиг. 7.15) ТП—Д тизимининг хусусиятларига ўхшаш бўлади. 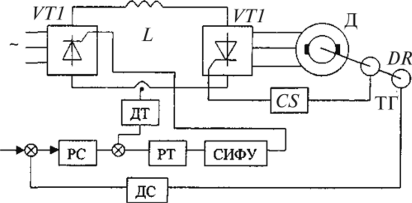 Шакл. 7.14. Клапанли двигател билан созланадиган електр юритманинг функсионал диаграммаси: ПC-тезликни бошқарувчи; РТ-токни бошқарувчи; ДС-тезлик датчиги; ДТ-ток датчиги; ДР-rotor ҳолати датчиги; ТГ-тахогенератор 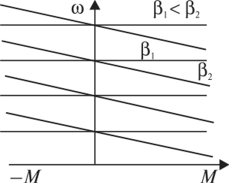 Схема бўйича валфли двигател тиристор калити-синхрон двигател Ўрта ва юқори қувватли валфли двигателда одатда електромагнит қўзғалиш билан анъанавий дизайндаги синхрон моторлар ишлатилади. Юқори қувватли двигателларда stator кучланиши 6,0 ёки 10,0 кв бўлганлиги сабабли, валф калити сифатида бошқариладиган ректификатор ВТХ ва inverter ВТ2 дан иборат тиристор конвертори ишлатилади (Фиг. 7.10). Инвертор rotor др нинг позиция датчикларидан ёқилган калит функцияларини бажаради. Тиристорлар ярим бошқариладиган қурилмалар бўлгани учун, inverter роторнинг айланадиган електромагнит майдони томонидан stator сариқларида қўзғатилган двигателнинг ЕМФ туфайли ёқилган қарам сифатида ишлайди. Motor қўзғатувчи ВТЛ томонидан қўзғалади. Шакл. 7.10. Тиристорли калит билан валфли двигател Двигател томонидан яратилган moment иккита оқимнинг ўзаро таъсири билан белгиланади: stator сариқларидаги оқимлар томонидан яратилган stator Фр ва қўзғалиш сариғидаги оқим томонидан яратилган rotor Ф0: бу ерда 0 л-stator ва rotor оқимлари векторлари орасидаги фазовий бурчак. Статорнинг магнит оқими роторни айланишга интилади, шунда rotor оқими stator оқими йўналишига тўғри келади. Rotor чулғамида яратилган енг катта moment оқим векторлари орасидаги бурчак 90 га тенг бўладиўқувчи векторлар яқинлашган сари нолга камаяди. Ушбу қарамлик сек. 7.11. Шакл. 7.11. Вана двигател моментининг stator ва роторнинг оқим векторлари орасидаги бурчакка боғлиқлиги Двигател режимига мос келадиган оқим векторларининг фазовий диаграммасини кўриб чиқинг (жуфт қутблар сони билан рп = 1). Ҳозирда 3 ва 4 тиристорлар ёқилган дейлик (расмдаги диаграмага қаранг. 7.10). Кейин оқим фазавий ўраш орқали л фазавий ўраш орқали тескари йўналишда ўтади, натижада статорнинг МДС вектори фазода Ф3 ҳолатини егаллайди (расм. 7.12). Агар rotor шу дақиқада кўрсатилган позицияни егалласа шакл. 7.13, кейин motor мувофиқ ривожланади (7.13) rotor соат мили айланади остидан максимал moment. 0 бурчаги камайганда, moment камаяди. Rotor 30 белгиланганда, МДС статорининг натижавий вектори Ф4 ҳолатини олиши учун двигател фазаларидаги токни алмаштириш керак (сек.7.12). Бунинг учун тиристор 3 ни ўчиринг ва тиристор 5 ни ёқинг. Ва кейин сиз тиристорларни рақамларининг ўсиш тартибида алмаштиришингиз керак. Шакл.7.12. Stator саргилари томонидан яратилган оқимларнинг фазовий ҳолати: Ф1—Ф4-статорнинг натижавий МДС; ФА, ФБ, Фc - статорнинг фазавий саргилари МДС Шакл.7.13. Stator МДС нинг rotor оқимига нисбатан фазовий диаграммаси: Фп0т-роторнинг МДС; сор0т - роторнинг тезлиги Фазавий коммутация rotor ҳолат датчиги ДР дан бошқариладиган тиристорли калит ВТ2 орқали амалга оширилади; шу билан бирга 0 бурчак 90 ичида сақланиб турилади30ъзгарувчанликка ега бўлган моментнинг максимал қийматига мос келади. РП = 1 да роторнинг битта айланишида олтита калит бўлиши керак, бунинг натижасида stator МДС тўлиқ инқилоб қилади (расмга қаранг. 7.12). Инвертор тиристорларининг барқарор коммутациясини таъминлаш учун уларнинг очилиш бурчагини илгариланма (3 > 1дақиқа моментнинг маълум пасайишига олиб келадигаи= 0 " (0-|3). ДC палласида сезиларли индуктивликка ега бўлган бўғувчи Л нинг киритилиши туфайли ВТ1-ВТ2 конвертори оқим манбаи сифатида ишлайди, бу бошқариладиган ректификаторнинг чиқиш кучланишини импулс-фазали тартибга солиш билан тартибга солинади ВТ1: бу ерда Р3КБ-stator ўраш палласининг еквивалент қаршилиги; Уc-ректификатор таъминот кучланиши; Ф0-қўзғалиш ўраши натижасида ҳосил бўлган rotor оқими. Жорий қийматни созлаш орқали сиз двигател томонидан ишлаб чиқилган моментни ўзгартиришингиз мумкин. Ушбу турдаги драйвларда тезликни бошқариш одатда ташқи тезликни бошқариш палласини киритиш орқали амалга оширилади (анжир. 7.14). Бу ҳолда, valve motor механик хусусиятлари (Фиг. 7.15) ТП—Д тизимининг хусусиятларига ўхшаш бўлади. Шакл. 7.14. Клапанли двигател билан созланадиган електр юритманинг функсионал диаграммаси: ПC-тезликни бошқарувчи; РТ-токни бошқарувчи; ДС-тезлик датчиги; ДТ-ток датчиги; ДР-rotor ҳолати датчиги; ТГ-тахогенератор Шакл. 7.15. Вана двигателининг механик хусусиятлари Бу схемада кириш ростлагич бошқарилганлиги учун двигателнинг ЕМФ cо > кcхуc а бўлганда регенератив тормозлаш режими мумкин. Кўриб чиқилаётган схеманинг маълум бир камчилиги инвертор тиристорларини паст тезликда (0.1 cо" дан паст) алмаштиришнинг мураккаблигидир, чунки бу ҳолда двигателнинг ЕМФ қарама-қарши инвертор клапанларини табиий алмаштириш учун етарли бўлмайди. Бу ҳолда двигателни 0.1 с тезликка ишга туширишда инвертор клапанлари қулфланганлигини таъминлаш учун унинг бошқариш схемасини мураккаблаштирувчи тўғрилагич тиристорларини қулфлаш орқали токни узиш керак. Ушбу схеманинг иккинчи камчиликлари inverter тугмачаларини алмаштиришда moment пулсацияларининг мавжудлиги. Бу ҳолда stator оқими векторининг космосдаги ҳолатида кескин ўзгариш бўлганлиги сабабли, роторнинг қизиб кетишига олиб келиши мумкин бўлган қисқа туташувли амортизация сарғишида оқимлар пайдо бўлади. Айниқса, роторнинг қизиши массив роторли қутбсиз двигателларда намоён бўлади. Ушбу схемадан фойдаланиш барча кучли синхрон моторлар учун силлиқ бошлаш режимини таъминлаш учун мумкин. СИНХРОН МОТОРЛАР БИЛАН ЕЛЕКТР ҲАЙДОВЧИНИНГ ЁПИҚ БОШҚАРУВ ДАВРЛАРИ Valve motor билан електр ҳайдаш. А valve автомобил (ВД) ўраш автомобил stator уланган електрон кучланиш калити билан бир синхрон автомобил, ва бир rotor жой сенсори автомобил мил ўрнатилган ва rotor ҳолатига қараб калити ишлашини назорат қилади. Rotor ҳолати сенсори даврий сигналларни ҳосил қилади, улар орқали stator саргиларини қувват манбаига улайдиган калитнинг яримўтказгич калитлари очилади ва ёпилади. Натижада, двигателнинг магнит майдонининг зарур ўзаро йўналиши ва сариқлардаги оқим сақланиб қолади ва восита ҳар қандай айланиш тезлигида йўналишда доимий моментни ривожлантиради. Шундай қилиб, ВД принципиал жиҳатдан доимий двигателга ўхшайди, лекин шу билан бирга у механик коллектор-чўтка йиғилишига ега емас ва шунинг учун у доимий магнитлар томонидан ҳаяжонланганда бутунлай контакциз восита ёки қўзғалиш сарғишидан фойдаланганда иккита алоқа ҳалқасига ега. ДC восита ва ВД ишлаш принципларининг тасодифийлиги уларнинг механик хусусиятларининг ўхшашлигини аниқлайди, натижада ВД баъзан контакциз ДC восита деб аталади. Доимий магнитлардан қўзғаладиган моторлар 30 квтгача қувват билан, одатда кўп қутбли дизайнда амалга оширилади. Доимий магнит моторлар умумий ўлчамлари ва вазни кичикроқ ва қўзғалиш саргисига ега моторларга нисбатан юқори самарадорликка ега. Ўрта ва юқори қувватли ВД - ларда одатда роторда жойлашган қўзғалиш ўрашига ега анъанавий дизайндаги синхрон моторлар ишлатилади. Вдни ривожлантириш учун истиқболли йўналиш-бу восита роторининг ҳолати бўйича сигнални билвосита, милга позиция сенсори ўрнатмасдан қабул қилишдир. ВД схемасидаги калит ан inverter агар ВД шаҳар манбаи билан қувватланса (шаҳар тармоғи, ректификатор батареяси) ёки асосан а частота конвертори агар ВД АC тармоғига уланган бўлса. 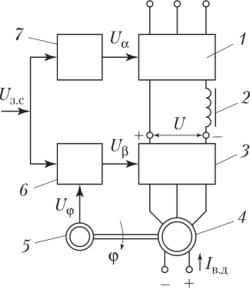 Шакл. 4.13. Вана motor диаграммаси 4.13. Қувват конвертори ректификатор ва inverter ўртасида уланган ва филтр вазифасини бажарадиган ректификатор /, inverter 3 ва реактор 2 ни ўз ичига олади. А rotor жой сенсори 5 автомобил мил жойлашган 4, қайси бир signal орқали беради ?/ ф inverter клапанлари талаб коммутация 3. Инвертор ва тўғрилагич клапанларини бошқариш 6 ва 7 бошқарув блокларидан келадиган ш ва Уа бошқарув сигналлари орқали амалга оширилади. Вана двигателининг тезлигини бошқариш кучланиш ва қўзғалиш оқимининг қийматини ўзгартириш орқали амалга оширилиши мумкин / в д. ВД тезлик даражаси У3C master сигнали билан аниқланади. Статик ва динамик режимларда юқори сифатли координатали бошқарувни олиш учун ВД билан електр драйверларда турли хил мулоҳазалар қўлланилади. Яқинда ВД-да 30 дан 200 квт гача қувватга ега уч фазали ўраш билан бирга статорда махсус жойлашган қўзғалиш саргисига ега контакциз синхрон моторлар ишлатилган. Бундай ҳолда, rotor ўралмаган тишли ғилдирак (тишли) бўлиб, унинг тишлари орқали қўзғалиш ва ўзгарувчан ток саргилари томонидан яратилган магнит оқим ёпилади. Rotor уч фазали ўраш натижасида ҳосил бўлган айланадиган магнит майдон билан синхрон равишда айланади. Қўзғалиш ўраш магнит оқимини кучайтиради ва шу билан восита моментини оширади. Степ восита билан електр ҳайдовчи. Баъзи ишлайдиган машиналар ва механизмларнинг ижро етувчи органлари ҳаракат охирида ўз позицияларини аниқлаб, қатъий ўлчовли ҳаракатларни бажаришлари керак. Бундай машиналар ва механизмларнинг електр драйверларида дискрет електр драйверининг асосини ташкил етувчи ҳар хил турдаги степперлар муваффақиятли қўлланилмоқда. Дискрет електр ҳайдовчи мослашувчан автоматлаштирилган ишлаб чиқариш, електрон ва соат саноатида, газни кесиш ва пайвандлаш машиналарида, вақт мосламаларида, прокат тегирмонларининг пресслаш мосламаларида, лента ва ёзиб олиш мосламаларида, рақамли бошқарув (CНC), роботлар ва манипуляторларга ега металлга ишлов бериш машиналарида қўлланилади.тиббий асбоб-ускуналар, микроелектроника елементларини ишлаб чиқаришда ва бошқалар. Дискрет електр ҳайдовчининг тарқалиши, табиий равишда технологиянинг барча соҳаларида тобора кўпроқ қўлланиладиган микропроцессор бошқарувлари билан бирлаштирилганлиги билан ҳам белгиланади. Степ двигателли електр ҳайдовчи ҳозирда ватт фракцияларидан бир неча киловаттгача қувват билан ишлатилади, бу тижорат ишлаб чиқарилган степперларнинг кучи билан белгиланади. Дискрет Епнинг қувват кўламини кенгайтиришга унда кетма-кет АД ёрдамида еришиш мумкин, бу тегишли бошқарув туфайли қадам режимида ишлаши мумкин. Степ восита унинг ишлаш принципи бўйича синхрон восита ҳисобланади. Бироқ, иккинчисидан фарқли ўлароқ, Степ моторининг магнит майдони доимий равишда ҳаракат қилмайди (айланмайди), лекин discretely, қадамлар билан. Бунга бир каналли бошқарув импулслари кетма-кетлигини stepper двигател саргиларига (фазаларига) қўлланиладиган кўп фазали кучланиш тизимига айлантирадиган електрон калит ёрдамида stepper двигател саргиларининг импулсли қўзғалиши орқали еришилади. Степ двигателининг фазаларидаги кучланишнинг дискрет табиати електромагнит майдоннинг ҳаво бўшлиғидаги дискрет айланишига (силжишига) мос келади, натижада роторнинг ҳаракати кетма-кет елементар бурилишлардан ёки қадамлардан иборат бўлади. Степ моторининг бурчакли силжиши одатда а = 2к / (рп) ифодаси билан белгиланади, бу ерда п-rotor қутблари жуфтлари сони; п-циклдаги коммутация цикллари сони, носимметрик ва ассиметрик коммутация билан фазалар сонига тенг. Кўриниб турибдики, роторнинг поғонали ҳаракати бошқарув импулслари кетма-кетлигига мос келади, ҳар бир импулс еса поғонали двигател ўрамининг битта коммутациясига (битта коммутация сикли) ва битта rotor поғонасига тўғри келади. Штатив двигателининг умумий айланиш бурчаги импулслар сонига пропорсионал ва унинг тезлиги сариқларнинг коммутация частотаси ^: cо = а / К. Степ моторини носимметрик коммутация даври билан қайтариш учун ушбу коммутация циклида ўчирилган ўраш кучланишининг қутбланишини ўзгартириш керак. Кейин Степ моторининг ротори тескари йўналишда қадам ташлайди. Степ драйверининг асосий ишлаш тартиби динамикдир. Анъанавий синхрон мотордан фарқли ўлароқ, Степ моторлари дам олиш ва мажбурий електр тормозлаш ҳолатидан синхронизмга кириш учун мўлжалланган. Шу сабабли, Степ восита бошлаш, тормозлаш, тескари ва бошқарув пулсларининг бир частотасидан бошқасига ўтишни таъминлайди. Степ моторини ишга тушириш кириш сигналининг частотасини нолдан ишлашга кескин ёки аста - секин ошириш, тормозлаш - уни нолга камайтириш ва тескари-Степ восита саргиларининг коммутация кетма-кетлигини ўзгартириш орқали амалга оширилади. Вақтинчалик моддаларнинг маълум бир хусусиятини таъминлаш Степ двигателли електр ҳайдовчи учун асосий ва енг қийин вазифадир, чунки Степ двигател сариқларининг електромагнит инерцияси, унинг роторининг механик инерцияси ва бошқарув импулсларини такрорлаш частотасининг кескин ўзгариши билан милга юкланиш моменти туфайли Степ двигател ротори барча импулсларни тўлиқ ишлаб чиқишга улгурмаслиги мумкин. Степ моторини стационар ҳолатдан синхронизмдан тушмасдан бошлаш мумкин бўлган бошқарув пулсларининг максимал частотаси (ўтиш босқичлари) қабул қилиш частотаси деб аталади. Степ моторининг електромагнит ва механик инерцияси қанчалик юқори бўлса ва унинг юкланиш моменти қанчалик катта бўлса, қабул қилиш частотаси шунчалик паст бўлади. Замонавий СД дизайн фарқ қилади. Фазалар сонига ва магнит тизимнинг қурилмасига қараб, СД фаол ёки пассив роторли битта, икки ва кўп фазали бўлиши мумкин. Дискрет електр ҳайдовчининг ривожланиши ШД нинг махсус турларини яратишга олиб келди - чизиқли, тўлқинли, паст инерцияли ва прокат роторлари. Силиндрсимон чизиқли степперлар асосида иккита координатали чизиқли-айланадиган степперлар яратилди, улар ўзларининг валларида иккита мустақил ҳаракатни — ротацион ва таржимани жамладилар. Дискрет електр ҳайдовчи соҳасидаги муҳим ютуқ-бу ижро етувчи органларни космосдаги учта координаталар бўйлаб ҳаракатга келтирадиган кўп координатали Степ моторларни яратиш. Юқори жойлашишни аниқлиги ва тезлиги билан ажралиб турадиган ушбу турдаги моторлар манипуляторлар, роботлар ва автоматик машина линияларида қўлланилади. 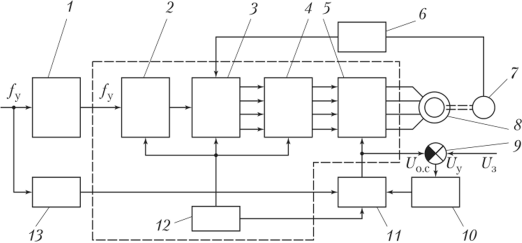 Шакл. 4.14. Степ двигателли електр ҳайдовчининг диаграммаси Степ двигател билан созланиши електр ҳайдовчининг умумий функционал диаграммаси сек. 4.14. Одатда очиқ електрон деб аталадиган унинг асосий қисми кесилган чизиқ билан таъкидланган. Волтаж импулслари кўринишидаги ФЙ бошқарув сигнали дастурий таъминот ёки бошқа ташқи буйруқ қурилмасидан 2-блокнинг киришига берилади. 2-блок ушбу импулсларни ўзгартиради, уларни кейинги бошқарув даври блокларининг normal ишлаши учун зарур бўлган муддат ва амплитуда ҳосил қилади. Импулс тарқатувчи 3 ҳосил бўлган импулслар кетма-кетлигини, масалан, двигателнинг фазалари (сариқлари) сонига мос келадиган тўрт фазали униполяр кучланиш импулслари тизимига айлантиради. Тарқатувчи 3 нинг чиқишидаги импулслар оралиқ кучайтиргич 4 ёрдамида кучайтирилади ва штатив двигател 5 нинг саргиларини озиқлантирадиган калит 8 га берилади. Одатда, калит ДC манбаи 12 (ректификатор) билан ишлайди ва Степ восита саргиларида бир йўналишдаги пулсацияланувчи оқимни таъминлайди. Степ моторининг кўриб чиқилган очиқ бошқарув даври ҳар доим ҳам юқори динамик хусусиятларни, електр ҳайдовчининг аниқлиги ва енергия кўрсаткичларини таъминламайди. Шунинг учун Степ моторининг замонавий бошқарув схемаларида қўшимча тугунлар мавжуд бўлиб, уларнинг ёрдамида електр ҳайдовчининг хусусиятлари яхшиланади. Бундай тугунлар (Фиг. 4.14) бир пулс частотали кучланиш созлагичини ўз ичига олади 11, а жорий фикрингиз кучайтиргич 10, електрон қадам майдалаш бирлиги 13, силлиқ тезлаштириш ва пастлаб бирлиги (тезлик setter) 1, бир rotor жой ва тезлик сенсори 7 ва рақамли назоратчи 6. Таққослаш тугунига уланган регулятор 77 ва кучайтиргич 10, Степ восита саргиларида оқимни автоматик равишда барқарорлаштиришга ва Степ восита моментини сақлашга хизмат қилади, бу унинг ишлашининг енергия кўрсаткичларини сезиларли даражада яхшилайди. Оқим стабилизацияси салбий оқим тескари алоқа киритиш орқали амалга оширилади, унинг ёрдамида регуляторнинг коммутация частотасини созлаш орқали 77 (импулс частотаси модуляцияси), таъминот кучланишининг ўртача қиймати ўзгаради ва шу билан Степ восита саргиларида оқим тартибга солинади. Степ восита саргиларида оқим ҳосил бўлишининг бир хил муаммоси оқим манбаи хусусиятларига ега бўлган 5 калити ёрдамида ҳал қилинади. Бундай ҳолда, ҳозирги тескари алоқа ва 10 ва 77 блокларга еҳтиёж қолмайди. Степ восита ҳаракатининг сифатини паст частоталарда яхшилаш ва блок 13 ёрдамида киришни бошқариш импулсларини қайта ишлаш аниқлигини ошириш учун Степ моторининг бирлик қадами камаяди. Дискрет Степ моторининг динамик хусусиятларини яхшилаш, хусусан, Степ моторини қабул қилиш частотасидан сезиларли даражада ошиб кетадиган кириш сигналининг ишлаш частоталари диапазонини ошириш, 7-блокни схемага киритиш орқали еришиш мумкин, бу еса Степ моторини маълум тезликда тезлаштиришни ва секинлаштиришни таъминлайди, бунда бошқарув импулслари ҳали ўтказиб юборилмайди. 7-блокдан фойдаланганда Степ електр драйверининг иш частотаси диапазони 2-3 баравар оширилиши мумкин. Sensor 7 ва бошқарувчи 6 ёрдамида амалга ошириладиган ёпиқ бошқарув даврларини яратишда дискрет електр ҳайдовчининг имкониятлари кенгаяди. Бундай дискрет дискда милнинг ҳақиқий ҳолати ва Степ моторининг тезлиги ҳақидаги маълумотлар ҳайдовчи ҳаракатининг олдиндан белгиланган характерини таъминлайдиган 6 рақамли текширгичнинг киришига берилади. Степперли двигателли електр драйверни янада ривожлантириш истиқболлари микропроцессор бошқарувидан фойдаланиш билан боғлиқ. Бу ҳолда, барча назорат бирликлари вазифалари шакл. 4.14, қувват калити, тезлик ва позиция сенсорлари бундан мустасно, микропроцессор томонидан тегишли дастурга мувофиқ амалга оширилади. Клапан-индуктор електр юритмасининг схемаси. Индуктор електр моторларининг соддалиги, ишлаб чиқарилиши ва арзонлиги вана-индуктор електр драйвери (ГНП) деб аталадиган бир қатор ишлайдиган машиналар ва механизмларни ишлаб чиқиш ва қўллашни аниқлади. Бундай електр ҳайдовчи кенг созлаш қобилиятлари билан ажралиб туради ва бирликлардан бир неча юз киловаттгача ёки ундан кўп қувватга ега бўлиши мумкин. 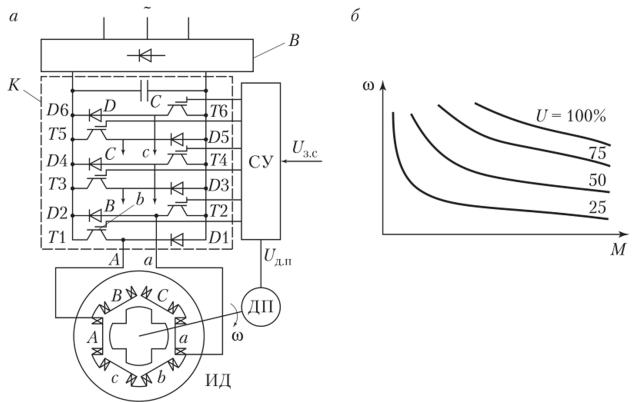 Шакл. 4.15. Вана-индуктор електр ҳайдовчисининг схемаси (а) ва хусусиятлари (б) Уч фазали ўзгарувчан ток тармоғидан қувват манбаи ҳолатида ВИПНИНГ қувват қисмининг блок диаграммаси сек. 4.15, а. у индуксион двигател идентификаторидан, ректификатор Б билан електрон коммутатор к, двигател роторининг позиция сенсори ДП ва СУ ВИП бошқарув тизимидан иборат. ВИПНИНГ ўзига хос хусусияти одатда 4-12 оралиғида ётувчи stator қутблари ва rotor тишлари сони тенг бўлмаган индуктор двигателдан фойдаланишдир. Расмда мисол сифатида роторда 6 stator қутблари ва 4 тишларга ега бўлган уч фазали восита кўрсатилган. ИД статорининг қутбларида електрон коммутаторга уланган тўртта а-а, б-б, C-c сариқлари мавжуд, улар одатда у ёки бу турдаги қувват транзисторларида бажарилади. Шакл диаграммасида. 4.15, и, 77-ТБ қувватли биполяр транзисторлар изоляцияланган ИГБТ дарвозаси билан бошқариладиган коммутаторлар сифатида ишлатилади. Калитлар бошқарув тизимининг бошқарув даври томонидан бошқарилади, бу уларга керакли кетма-кетлик ва частотани бошқариш импулслари билан таъминлайди, улар тезликни созлаш сигналлари билан белгиланади У3C ва позиция сенсори 1/ дп. ВИПНИНГ ишлаш принципи қуйидагича. Бир фазанинг бир жуфт транзисторига (калитларига) бошқарув импулслари қўлланилганда, калит моторнинг ушбу фазасининг сариғини б ректификаторининг чиқишига улайди. Ушбу магнит майдон stator қутблари ва уларга енг яқин rotor тишлари ўртасида електромагнит жозибали кучларнинг пайдо бўлишига олиб келади, бу еса восита милида moment ҳосил қилади. Унинг ҳаракати остида rotor статорнинг қўзғалган қутблари ва уларга енг яқин жойлашган rotor тишларининг ўқлари мос келадиган изчил ҳолатга ўтади. Stator қутблари ва rotor тишларининг сони ҳар хил бўлганлиги сабабли, иш фазаси учун роторнинг келишилган ҳолатида, кейинги фаза мос келмайдиган ҳолатда бўлади ва қувват манбаига кейинги уланиш учун тайёрланади. Двигателнинг фазаларини қувват манбаига улашнинг керакли кетма-кетлиги, унда унинг милида доимий moment йўналиши таъминланади, милда жойлашган позиция сенсори ёрдамида амалга оширилади. Роторнинг айланиш тезлиги қуйидаги formula билан аниқланади бўлди./ * саргиларнинг коммутация частотаси; т-восита фазалари сони; п-rotor тишлари сони. Ушбу formula випни турли тезликда бажариш имкониятларини кўрсатади. Сариқларнинг юқори коммутация частотасида идентификаторлар юқори айланиш тезлигида амалга оширилиши мумкин ва уларнинг кўп сонли stator устунлари ва rotor тишлари билан бажарилиши паст ВИП тезликка имкон беради. Иднинг паст тезлигида Витес қутиларини ВИПНИНГ кинематик схемасидан чиқариб ташлаш мумкин. ВИПНИНГ турли хил волтаждаги очиқ тузилишидаги механик хусусиятлар сек. 4.15, б. турли хил мулоҳазалар ёрдамида електр драйверининг координаталарини керакли сифат билан тартибга солишни таъминлайдиган хусусиятларни шакллантириш мумкин. Випда тормозлаш режимини ҳам амалга ошириш мумкин, бу восита саргиларини ёқиш ва ўчириш моментларини танлаш орқали амалга оширилади. 4.15 ва Д1—Д6 диодлари електр транзисторлари ўчирилганда електр драйверида електромагнит қувват айланишини таъминлаш учун хизмат қилади ва C конденсатори ректификаторнинг чиқишида филтр ролини ўйнайди. Микропроцессор бошқарувлари замонавий ВИП схемаларда кенг қўлланилади. Улардан фойдаланганда баъзи ҳолларда електр ҳайдовчисида позиция сенсори ишлатилишидан воз кечиш ва роторнинг ҳолати тўғрисида унинг ишлаши учун зарур бўлган маълумотларни билвосита олиш мумкин. Бу ВИПНИНГ кинематик схемасини соддалаштиришга имкон беради ва шу билан уни содда ва ишончли қилади. Синхрон двигателнинг қўзғалиш токини автоматик тартибга солиш схемаси. Синхрон двигателлар (СД), уларнинг қўзғалиш токини тартибга солиб, у билан тармоқ ўртасида айланма реактив қувват даражасини ўзгартириши, хусусан, реактив қувват компенсаторлари сифатида ишлаши мумкин. Бундан ташқари, қўзғалиш оқимини тартибга солиш орқали двигателда ва електр таъминоти тизимидаги елементларда енергия йўқотишларини камайтириш, таъминот кучланишини ёки СД қувват омилини сақлаш мумкин. Бундай схемалар автоматик қўзғалишни бошқариш (АРВ) схемалари дейилади. 4.16-расмда мисол сифатида АРВ СД схемаси кўрсатилган. У қуйи координаталарни тартибга солиш принципи асосида қурилган ва учта ўзгарувчини тартибга солишни таъминлайди: қўзғалиш оқими, восита кучланиши ва СД stator оқимининг реактив компоненти. Биринчи ва иккинчи схемалар РТВ қўзғалиш регулятори ёрдамида қўзғалиш оқимини бошқаришни таъминлайди. РТВ киришидаги signal РCТВ қўзғалиш токини созлаш бошқарувчисидан келаётган қўзғалиш токини белгилаш сигналларидан, ДТВ қўзғалиш токи датчигидан келаётган қўзғалиш токи /в нинг жорий қийматидан ва minimal ток setpoint /Бмин дан ҳосил бўлади. СИФУ ёрдамида РТВ нинг чиқиш сигнали керакли регуляция / В ни таъминловчи телевизорнинг тиристор қўзғатувчисида ҳаракат қилади. Stator оқими / а фаол компонентининг квадратига мутаносиб сигналлар (канал: квадратик конвертор компютерни шакллантирувчи УВ кучайтиргич), фаол оқимнинг ҳосиласи (канал: фаол оқим сенсори ДАТ — дифференциал конвертор ДП) ва реактив оқим регуляторидан оқимнинг реактив компоненти ППТ РCТВ (иккинчи бошқарув даври) кириш қисмида олинади. 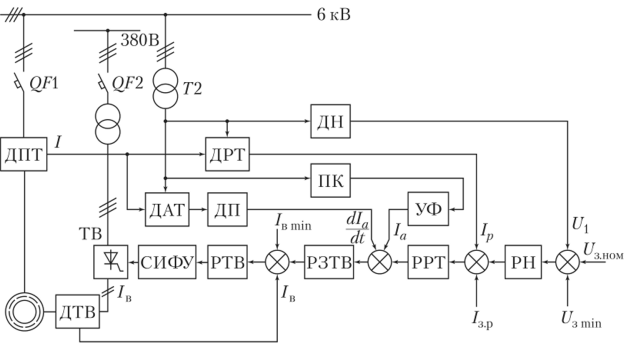 4.16-расм. Синхрон двигателнинг қўзғалиш оқимини автоматик тартибга солишнинг ёпиқ даври Унинг киритилишида оқимнинг реактив компонентига (реактив оқим сенсори ДРТ) тескари алоқа сигналлари ва иккита вазифа сигналлари йиғилади - кучланиш регуляторидан ПҲ ва реактив оқим / сп даражасини белгилаш учун signal. ПҲ кириш (тўртинчи назорат електрон) да, кучланиш feedback сигналлари сарҳисоб қилинади ?/ , (Дн кучланиш сенсори) ва иккита назорат сигналлари - nominal У3ҲОМ ва minimal у3мин кучланишлари. Кучланишни тартибга солиш даври, шунингдек, таъминот тармоғидаги кучланиш 0,8-0,85 номиналга тушганда, схемада махсус қўзғалишни кучайтириш тугуни мавжудлиги сабабли СДП қўзғалишини кучайтиради. |