срс 1 машины. Силовое оборудование и привод строительных машин. Силовые и ходовые оборудование строительных машин. Основные параметры, виды
 Скачать 314.17 Kb. Скачать 314.17 Kb.
|

|
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РЕСПУБЛИКИ КАЗАХСТАН Международная образовательная корпорация  Реферат на тему «Силовое оборудование и привод строительных машин. Силовые и ходовые оборудование строительных машин. Основные параметры, виды» Выполнил: Көбей М.Б. Группа: ТПГС 20-2* Проверила: Шогелова Н.Т.Алматы 2022 Содержания ХОДОВОЕ ОБОРУДОВАНИЕ Гусеничное и пневмоколесное ходовое оборудование Типы шин Жесткое колесное (рельсовое) оборудование Тяговый расчет. Коэффициенты сопротивления передвижению f и сцепления |/ ХОДОВОЕ ОБОРУДОВАНИЕ Ходовое оборудование машин состоит из движителей, механизма передвижения и опорных рам, основными задачами которых являются передвижение машин на рабочих и транспортных скоростях, передача на опорную поверхность нагрузки от силы тяжести машины и внешних воздействий со стороны обрабатываемой среды, обеспечение устойчивости машины. В отдельных случаях ходовое оборудование участвует непосредственно в технологическом процессе, обеспечивая дополнительное тяговое усилие. По типу движителей различают ходовое оборудование: гусеничное, пневмоколесное, жесткое колесное (рельсовое и безрельсовое), шагающее, плавучее, на воздушной подушке. Привод движителей обеспечивает механизм передвижения. Большинство строительных машин имеют гусеничный, пневмо- колесный или жесткий колесный (рельсовый) ход. Основными показателями, характеризующими ходовое оборудование, являются проходимость, мобильность, маневренность (см. §1.1). Проходимость зависит от типа и состояния движителя, удельного давления на поверхность качения, дорожного просвета (клиренса), а у машин на колесном ходу еще от числа и расположения колес, их диаметра. Клиренс — это расстояние от поверхности дороги до наиболее низкой точки ходового оборудования. Следует иметь в виду, что рабочее оборудование строительных и коммунальных машин уменьшает клиренс по сравнению с базовой машиной. Удельное давление машины — отношение нагрузки, приходящейся на движитель, к площади опорной поверхности. Для машин с гусеничным ходом среднее давление на грунт (МПа) где М — масса машины, кг; g — ускорение свободного падения, см/с2; а — число гусениц; b — ширина гусеницы, см; / — длина опорной поверхности гусеницы, см. Для колесных машин с пневматическими шинами давление на грунт определяют с учетом давления воздуха в шине р (МПа) и ее жесткости/:- 1,20...1,25: Гусеничное ходовое оборудование широко распространено в машинах, преимущественно передвигающихся по бездорожью, что связано с их высокой проходимостью и небольшим удельным давлением (0,04...0,10 МПа). Гусеничный ход (рис. 1.24, а) состоит из замкнутой гусеничной ленты 5, натянутой между приводным 6 и натяжным 12 колесами гусеничной опорной рамы 13, оборудованной опорными 4 и поддерживающими вкатками. Гусеничные рамы крепят к ходовой раме 11, с которой при помощи опорно-поворотного устройства соединяется поворотная платформа машины. Привод гусениц индивидуальный от гидромоторов через бортовые зубчатые передачи 7. Жидкость от гидронасосов, установленных на поворотной платформе, поступает к нормально замкнутым тормозам и гидромоторам через вращающееся соединение 1 и трубопроводы 8—10. Включение двигателя одной из гусениц обеспечивает поворот гусеничной тележки, а включением двигателей в противоположных направлениях вращения — разворот гусеничной тележки на месте. Гусеничная лента состоит из отдельных литых или штампованных звеньев (траков), соединенных шарнирно пальцами. На внутренней поверхности звеньев имеются выступы, с которыми взаимодействует ведущее колесо при передвижении машины. Для натяжения гусеничной ленты ось ведомого колеса крепят в ползунах, перемещающихся по направляющим гусеничной рамы. В зависимости от способа крепления опорных катков гусеницы могут быть жесткие (оси катков прикреплены к гусеничной раме жестко) и мягкие (оси катков подрессорены). Мягкие гусеницы сложнее в изготовлении и эксплуатации, но они лучше приспосабливаются ко всем неровностям грунта. Если число опорных звеньев превышает чисто опорных катков более чем вдвое, то гусеница является малоопорной, если менее — то многоопорной. Гусеницы многоопорные обеспечивают большую плавность передвижения и улучшают проходимость машины по 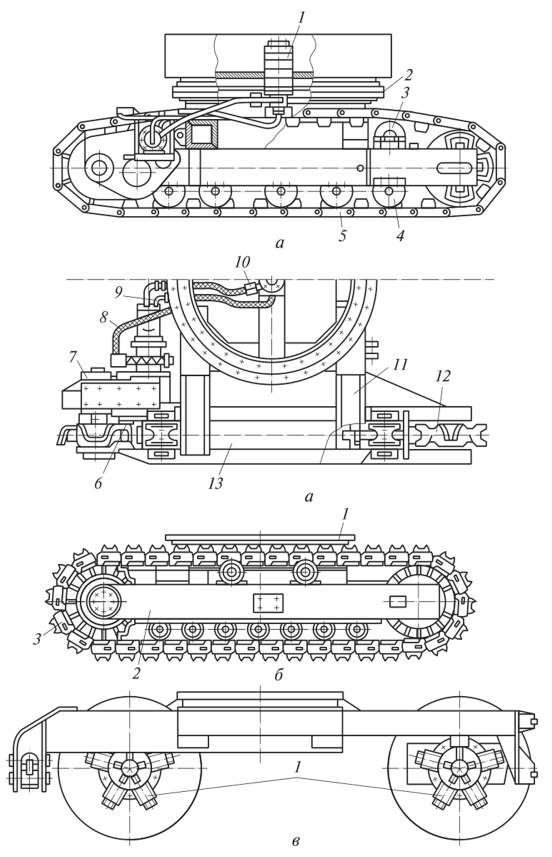 Рис. 1. Гусеничное и пневмоколесное ходовое оборудование слабым грунтам. Малоопорные гусеницы не обеспечивают плавности движения и создают условия для возникновения дополнительных пульсирующих напряжений в опорно-ходовых элементах гусеничного хода, что ухудшает проходимость машины на слабых грунтах. Однако малоопорные гусеницы достаточно прочные, выдерживают большие нагрузки (до половины массы машины на опорный каток), что позволяет машине передвигаться и работать на скалистых или мерзлых грунтах. В строительных машинах преимущественно используют жесткие многоопорные гусеницы, обеспечивающие жесткую базу при работе. Для машин, работающих и перемещающихся на слабых, переувлажненных или болотистых грунтах, применяют специальные уши- ренно-удлиненные гусеницы, увеличивающие опорную поверхность и снижающие удельное давление на грунт до 0,02...0,03 МПа. В настоящее время в строительных машинах все большее применение получает гусеничный ход тракторного типа (рис. 1.24, б), в котором траки крепят болтами к гусеничным цепям с закрытыми шарнирами, что увеличивает срок службы и упрощает ремонт ходового устройства. По числу гусеничных тележек гусеничный ход подразделяют на двухгусеничный и многогусеничный. Последний применяют на тяжелых (массой 300... 1000 т) и сверхтяжелых (более 1000 т) машинах. 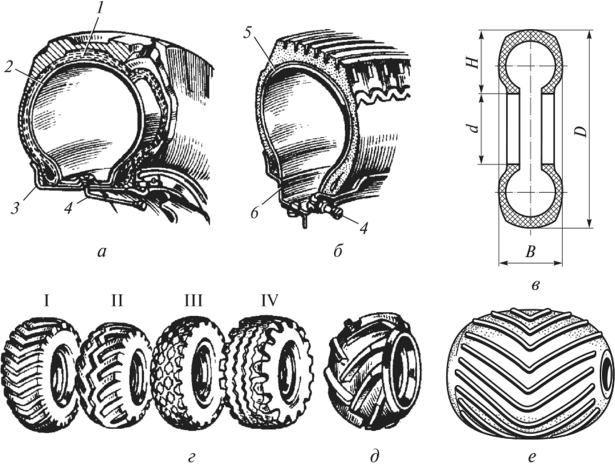 Рис. 2. Типы шин Кроме небольшого давления на грунт, к достоинствам гусеничного ходового оборудования относится отсутствие необходимости в установке выносных опор (аутригеров), малые радиусы поворота, возможность преодоления больших уклонов (до 50%) и хорошие сцепные качества, благоприятные условия для устойчивости при передвижении в работе. Гусеничный ход имеет удовлетворительную маневренность и достаточную мобильность. Основные недостатки гусеничного хода: сложность конструкции, быстрое изнашивание, большая масса (до 35% от общей массы машины), небольшая скорость передвижения (до 15 км/ч), низкий КПД (0,65...0,75), недопустимость передвижения по дорогам с усовершенствованными покрытиями во избежание их повреждениия. Пневмоколесное ходовое оборудование обеспечивает строительным машинам хорошее маневрирование, достаточную устойчивость, высокие скорости передвижения (до 60 км/ч), а также является легче гусеничного на 25...35%, проще в изготовлении, имеет высокий КПД (0,80...0,85) и большой ресурс работы (до40тыс. кмвместо 1,5...2,0тыс. км, достигаемый гусеничным ходом). Однако проходимость машин на пневмоколесном ходу значительно хуже, чем гусеничных. Пневмоколесный ход преобразует вращающий момент в силу тяги машины в результате взаимодействия шины с поверхностью качения. Пневмоколесное оборудование выполняют обычно двухосным с одной или двумя ведущими осями. Более тяжелые машины производят трехосными или многоосными с двумя или несколькими ведущими осями. Различают шины камерные и бескамерные. Составными частями камерной шины (рис. 1.25, а) являются покрышка 1, служащая прочной и эластичной оболочкой, камера 2, накачиваемая воздухом через вентиль 4, и ободная лента 3, предохраняющая камеру со стороны обода. Рисунки протектора (беговой части шины) разнообразны (рис. 1.25, г); их выбирают в зависимости от условий работы. Шины с рисунком протектора I применяют для земляных работ; 11 — для работы в каменных карьерах; 111— в случаях, когда возможно буксование; IV— универсальные. В зависимости от дорожных условий используют шины высокого — 0,5...0,7 МПа, среднего — 0,3...0,4 МПа, низкого — 0,15...0,25 МПа и сверхнизкого — 0,05. ..0,08 МПа давления. Последние имеют большую площадь контакта с грунтом и лучшие тяговые качества, обеспечивают более плавное движение и лучшую сохранность машины. Применение шин низкого и сверхнизкого давления наиболее целесообразно в сочетании с централизованной системой регулирования давления шин. Для улучшения проходимости на слабых или переувлажненных грунтах давление в шинах снижают до минимального значения, а при движении на плотных грунтах или по дорогам с покрытием давление в шинах повышают до нормального. Благодаря этому при движении по дороге сопротивление качению уменьшается, шина подвергается меньшей деформации и срок ее службы увеличивается. Широкое распространение получили бескамерные шины (рис. 1.25, б). В этих шинах камера отсутствует, а воздух накачивается непосредственно в полость покрышки 5, установленной на герметичном ободе 6. Внутренняя полость покрышки имеет дополнительный герметизирующий слой резины. Бескамерные шины лучше охлаждаются, имеют меньшую массу, повышают безопасность движения, так как при повреждении не происходит резкого падения давления. В некоторых случаях для повышения проходимости машин на ведущих колесах применяют бескамерные арочные шины (рис. 1.25, д) или пневмокатки (рис. 1.25, е), отличающиеся широким профилем, низким давлением и большими грунтозацепами. На боковины шин наносят маркировку (рис. 1.25, в): первое число характеризует ширину профиля В, а второе — внутренний диаметр (или посадочный диаметр на обод) d (миллиметры или дюймы). Наружный диаметр D обычной шины связан с высотой Ни внутренним диаметром d зависимостью Пневмоколесное ходовое оборудование строительных машин может иметь механический, гидравлический, электрический и комбинированный привод колес. Наиболее распространены механический и гидравлический приводы. В этих приводах наиболее часто используется вариант привода ведущих колес, объединенных в мосты попарно через дифференциалы. Это обеспечивает высокие скорости движения машины без проскальзывания колес. В настоящее время в строительных машинах внедряют индивидуальный привод каждого колеса от своего гидродвигателя — привод с мотор-колесами 1 (см. рис. 1.24, в). В этих машинах механическая связь между колесами отсутствует; каждое колесо приводится в движение от высокомоментного гидромотора через редуктор, вмонтированный в ступицу колеса. Применение мотор-колес упрощает компоновку машины, улучшает ее маневренность и проходимость за счет того, что каждое колесо становится приводным и управляемым. Недостатки пневмоколесного ходового оборудования: при обычных шинах большое давление на грунт, ограниченность проходимости и грузоподъемности, сравнительно малый коэффициент сцепления колес с основанием. Жесткое колесное (рельсовое) оборудование по технико-эксплуатационным показателям относится к наиболее совершенному виду и используется в машинах с ограниченной маневренностью. Основные его достоинства — простота конструкции, надежность, долговечность, малое сопротивление передвижению. Вследствие низкой маневренности колесно-рельсовое ходовое оборудование находит весьма ограниченное применение (башенные, козловые, мостовые и специальные стреловые самоходные краны, тельферы, сваебойные установки и др.). Для рельсовых путей применяют в основном стандартные железнодорожные рельсы. Ходовые колеса кранов изготовляют литыми, коваными или штампованными, одно- или двухребордными, с цилиндрической или конической поверхностью качения. В качестве привода ведущих колес чаще всего используют электродвигатели. Нагрузки на колесо могут достигать 100...200 кН, а давление на основание от шпал — до 0,2 М Па. Недостатки колесно-рельсового ходового оборудования: необходимость укладки рельсовых путей, сложность перехода на новые участки работы. Тяговый расчет. Движение машин сопровождается действием сил, которые могут быть объединены в две основные группы: силы тяги Т, стремящиеся сообщить ведущей оси, а вместе с ней и машине поступательное движение, и силы сопротивления W, возникающие при движении машины и направленные в сторону, противоположную движению. Кроме того, могут иметь место дополнительные силы сопротивления в виде тормозных сил, прилагаемые только при необходимости уменьшения скорости движения. Движение машины будет возможным, если выполняются следующие два условия: 1) сила тяги привода ходового оборудования машины должна быть больше или равна сумме всех сопротивлений, возникающих при движении машины, т.е. 2) сила тяги по сцеплению движителя машины с дорогой или рельсом Т должна быть больше или равна силе тяги, развиваемой приводом ходового оборудования машины, т. е. Тяговое усилие, развиваемое машиной, в первом приближении можно считать равным окружной силе Fo (Н) всех движителей машины (приводных колес, гусениц), приводимых от двигателя привода:  где Р — мощность двигателей механизмов передвижения, кВт; г| — общий КПД механизма передвижения; v — скорость передвижения, м/с. Сопротивление, возникающее при движении машины (Н), где Wbh — внутреннее сопротивление ходового оборудования; Wk — сопротивление качению колес или гусениц; W — сопротивление повороту при движении по кривой; Wy — сопротивление уклона местности; Wn — сопротивление силе инерции при разгоне (торможении); Wn — сопротивление воздуха; W — сопротивления, возникающие на рабочих органах машины. Внутренние сопротивления ходового оборудования составляют 6...9% силы тяжести гусеничной машины и 4...6% силы тяжести колесной машины. Сопротивление качению колес или гусениц в первом приближении можно рассчитать, по формуле где / —коэффициент сопротивления передвижению движителей, значения которого приведены в табл. 1.1; Gu — сила тяжести машины, Н. Сопротивление повороту W рассчитывают, как правило, для кр случая движения машины по рыхлому грунту: • для колесных машин • для гусеничных машин Сопротивление движению машин от уклона местности где ц/ — угол подъема пути (при движении машины на подъем ставится знак «+», под уклон — знак «—»). При предварительных расчетах угол подъема можно принять равным 20...25° для гусеничных машин, 15...20° — для пневмоколесных и 5...7° — для колесно-рельсовых. Если считать движение равноускоренным, то сопротивление силе инерции при разгоне машины (торможении) будет где vp — рабочая скорость, м/с; v0 — начальная скорость машины, м/с; g—ускорение свободного падения, м/с2; tp — время разгона или торможения, с. При разгоне принимают знак «+», при торможении — знак «—», так как при этом сила инерции способствует продолжению движения. При трогании с места на первой передаче можно принять для колесных машин v = 1,0... 1,5 м/с, а для гусеничных — v = = 0,25...0,30 м/с. Сопротивление воздуха где S — площадь поперечного сечения машины, м2; р — плотность воздуха, кг/м3. Таблица 1.1 Коэффициенты сопротивления передвижению f и сцепления |/
Как видно из формулы (1.38), сопротивление воздуха возрастает пропорционально квадрату скорости и становится существенным при скорости более 60...70 км/ч. Сопротивление от рабочего органа W зависит от назначения и типа машины, характера выполняемых ра^от, конструкции рабочего органа и других факторов. Указанные сопротивления в действительности все вместе одновременно не возникают, и при тяговом расчете учитываются только те сопротивления, которые могут иметь место для рассматриваемой машины в конкретных условиях ее работы. Для проверки второго условия возможности движения машины определяют достаточность сцепления ведущих колес или гусениц с дорогой (грунтом), гарантирующую отсутствие буксования, при этом где G — сцепной вес машины (для колесных машин равен весу, приходящемуся на ведущие колеса; для гусеничных машин равен полному весу машины); ф — коэффициент сцепления движителя с дорогой (см. табл. 1.1). Во время движения машины может возникнуть следующая характерная ситуация: Из неравенства (1.40) видно, что сила тяги привода ходового оборудования машины недостаточна для преодоления сопротивлений и меньше силы тяги по сцеплению движителя с дорогой. В такой ситуации ходовое колесо провернуться не сможет и двигатель заглохнет. Если ведущие колеса или гусеницы оказываются на влажной или обледеневшей дороге, на мокром глинистом грунте и т.п., то коэффициент сцепления и, соответственно, сила сцепления Гсцзначительно уменьшаются и может иметь место неравенство При этом движитель будет буксовать и машина не сдвинется с места. | ||||||||||||||||||||||||||||||||||