Синхронные машины. Синхронные машины 15 общие сведения
 Скачать 0.83 Mb. Скачать 0.83 Mb.
|

|
16.2. УРАВНЕНИЕ ДВИЖЕНИЯ ЭЛЕКТРОПРИВОДА Для проектирования электропривода необходимо знать кинематику и эксплуатационные условия рабочей машины. Нагрузка на валу электродвигателя слагается из статической и динамической нагрузок. Первая обусловливается полезными и вредными сопротивлениями движению (от сил трения, резания, веса и т. п.); вторая возникает применениях кинетической энергии в системе привода вследствие изменения скорости движения тех или иных частей устройства. В соответствии с этим момент, развиваемый двигателем, В 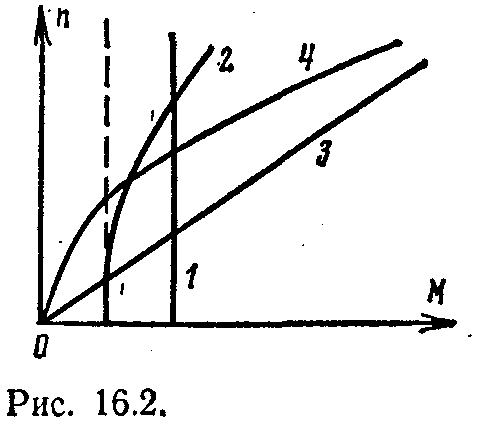 этом выражении Мст— статический момент, обусловленный силами полезных и вредных сопротивлений. Он может не зависеть от частоты вращения (рис. 16.2, прямая 1), если создается трением, силами сопротивления при резании металла и т. п., или может в какой-то степени зависеть от частоты вращения. Например, у центробежного насоса, питающего систему с постоянным напором, статический момент складывается из постоянной составляющей и составляющей, пропорциональной квадрату частоты вращения (рис. 16.2, кривая 2). Момент может зависеть от скорости линейно (3) и нелинейно (4). этом выражении Мст— статический момент, обусловленный силами полезных и вредных сопротивлений. Он может не зависеть от частоты вращения (рис. 16.2, прямая 1), если создается трением, силами сопротивления при резании металла и т. п., или может в какой-то степени зависеть от частоты вращения. Например, у центробежного насоса, питающего систему с постоянным напором, статический момент складывается из постоянной составляющей и составляющей, пропорциональной квадрату частоты вращения (рис. 16.2, кривая 2). Момент может зависеть от скорости линейно (3) и нелинейно (4).Входящая в уравнение моментов (16.1) величина называется динамическим моментом. Этот момент может быть как положительным, так и отрицательным. Величина J, которой MДИН пропорционален, называется моментом инерции. Это — взятая для всего тела сумма произведений масс mkотдельных частиц тела на квадрат расстояния Rkсоответствующей частицы от оси вращения: Обычно момент инерции удобно выразить как произведение массы тела на квадрат радиуса инерции Rинт. е. где Rин— расстояние от оси вращения, на котором нужно сосредоточить в одной точке всю массу тела, чтобы получить момент инерции, равный фактическому при распределенной массе. Радиусы инерции простейших тел указываются в справочных таблицах. Вместо момента инерции в расчетах приводов применялось понятие махового момента — величины, связанной с моментом инерции простым соотношением: где G — вес тела; D= 2Rин— диаметр инерции; g— ускорение силы тяжести; GD2— маховой момент. Моменты инерции роторов и якорей электродвигателей обычно указываются в каталогах. Желательно, чтобы приводной электродвигатель был соединен с рабочим органом рабочей машины (например, с резцом) непосредственно, без каких-либо промежуточных зубчатых или ременных передач. Однако в большом числе случаев это неосуществимо из-за того, что рабочий орган должен иметь относительно небольшую частоту вращения (50—300 об/мин) при высокоскоростном электродвигателе. Изготовлять специальный тихоходный электродвигатель невыгодно. Он будет иметь слишком большие габариты и массу. Рациональнее с тихоходным приводом соединить через редуктор нормальный электродвигатель (750—3000 об/мин). Н 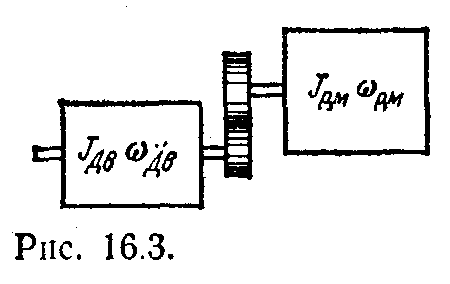 о при расчетах сложной системы привода с вращательными или' поступательными движениями и различными скоростями отдельных ее элементов целесообразно заменить ее приведенной системой — упрощенной системой, состоящей из одного элемента, вращающегося с частотой электродвигателя. При переходе к приведенной системе от действительной моменты в системе пересчитываются таким образом, чтобы остались неизменными энергетические условия. о при расчетах сложной системы привода с вращательными или' поступательными движениями и различными скоростями отдельных ее элементов целесообразно заменить ее приведенной системой — упрощенной системой, состоящей из одного элемента, вращающегося с частотой электродвигателя. При переходе к приведенной системе от действительной моменты в системе пересчитываются таким образом, чтобы остались неизменными энергетические условия.Например, двигатель, угловая скорость вала которого ωдв, соединен через одноступенчатую зубчатую передачу с рабочей машиной (рис. 16.3), угловая скорость которой ωр_ м. Если пренебречь потерями в передаче (они учитываются в приведенной системе), то из условия неизменности мощности следует: г  де Мст — искомый статический момент рабочей машины, приведенный к валу двигателя (т. е. угловой скорости вала двигателя); Мрм — действительный статический момент рабочей машины на ее валу; kпер = ωдв/ωр, м — передаточное число от двигателя к рабочей машине. Если рабочий орган под действием силы Fp, M выполняет не вращательные, а поступательные движения со скоростью υP,M, то на основании неизменности мощности и, следовательно, искомый приведенный статический момент В приведенной системе должны быть представлены и приведенные моменты инерции. Приведенный момент инерции системы есть момент инерции системы, состоящей только из элементов, вращающихся с частотой вращения вала двигателя ωдв, но обладающих запасом кинетической энергии, равным запасу кинетической энергии действительной системы. Из условия неизменности кинетической энергии следует, что для системы, состоящей из соединенных через одну зубчатую передачу двигателя и вращающейся с угловой скоростью ωр, м рабочей машины, обладающей моментом инерции JP,м, или искомый приведенный момент инерции системы Таким образом, для сложного привода в уравнениях (16.1) и (16.4) подразумеваются приведенные значения статических моментов инерции. Если известен момент М, выраженный в Н-м, и частота вращения п, об/мин, то соответствующая мощность Р, кВт, где коэффициент 9550 = 60-103/2л не имеет размерности. 16.3. ОСНОВНЫЕ РЕЖИМЫ РАБОТЫ ЭЛЕКТРОПРИВОДОВ Д 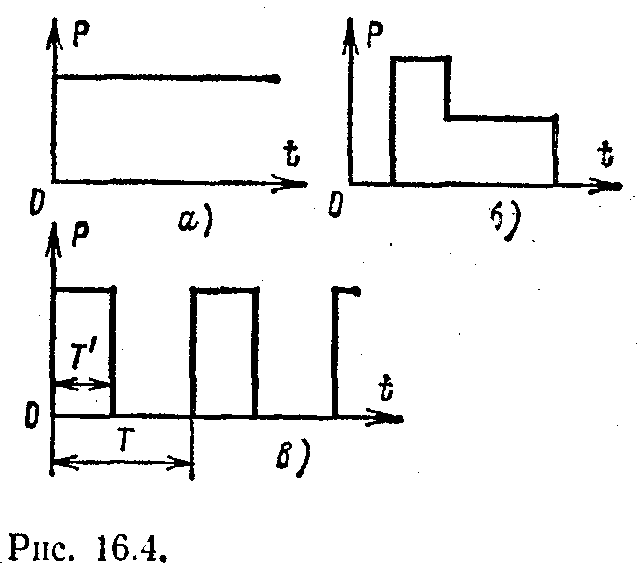 лительность работы и ее характер определяют рабочий режим привода. Для электропривода принято различать три основных режима работы: продолжительный, кратковременный и повторно-кратковременный. лительность работы и ее характер определяют рабочий режим привода. Для электропривода принято различать три основных режима работы: продолжительный, кратковременный и повторно-кратковременный.Продолжительный режим (согласно ГОСТ 183-74) — это режим работы такой длительности, при которой за время работы двигателя температура всех устройств электропривода достигает установившегося значения (рис. 16.4, а). В качестве примеров механизмов с длительным режимом работы можно назвать центробежные насосы насосных станций, вентиляторы, компрессоры, конвейеры непрерывного транспорта, дымососы, бумагоделательные машины, машины для отделки тканей и т. д. При кратковременном режиме рабочий период относительно краток (рис. 16.4, б) и температура двигателя не успевает достигнуть установившегося значения. Перерыв же в работе исполнительного механизма достаточно велик для того, чтобы двигатель успевал охладиться практически до температуры окружающей среды. Такой режим работы характерен для самых различных механизмов кратковременного действия: шлюзов, разводных мостов, подъемных шасси самолетов и многих других. При повторно-кратковременном режиме (рис. 16.4, в) периоды работы чередуются с паузами (остановка или холостой ход), причем ни в один из периодов работы температура двигателя не достигает установившегося значения, а во время снятия нагрузки двигатель не успевает охладиться до температуры окружающей среды. Характерной величиной для повторно-кратковременного режима является отношение рабочей части периода Т' ко всему периоду Т. Эта величина именуется относительной продолжительностью работы (ПР %) или относительной продолжительностью включения (ПВ %). Примерами механизмов с повторно-кратковременным режимом работы могут служить краны, ряд металлургических станков, прокатные станы, буровые станки в нефтяной промышленности и т. д. В соответствии с основными видами режимов работы электропривода различно определяется и номинальная мощность электродвигателя. Условия нагревания и охлаждения двигателя при повторно-кратковременном режиме существенно отличаются от условий работы в продолжительном режиме. Например, условия охлаждения обмотки возбуждения двигателя постоянного тока параллельного возбуждения практически остаются неизменными и при остановке двигателя, а условия охлаждения якоря при остановке сильно ухудшаются. По этой причине двигатель постоянного тока, рассчитанный для продолжительного режима на неизменные условия охлаждения, при повторно-кратковременном режиме будет использоваться нерационально; при предельно допустимом нагреве обмотки якоря и коллектора обмотка возбуждения будет нагреваться значительно ниже допустимой температуры. Следовательно, целесообразно для повторно-кратковременного режима изготовлять двигатели специальных типов. Руководствуясь этим, электротехническая промышленность изготовляет крановые электродвигатели, рассчитанные на три различных номинальных режима: продолжительный, кратковременный и повторно-кратковременный. Соответствующее указание делается на табличке электродвигателя; под его номинальной мощностью следует понимать полезную механическую мощность на валу в течение времени, соответствующего его номинальному режиму, т. е. продолжительно, кратковременно или же повторно-кратковременно при определенной продолжительности включения. В течение весьма короткого промежутка времени двигатель может развивать мощность значительно большую, чем номинальная. Мгновенная перегрузочная мощность двигателя — это наибольшая мощность на валу в течение весьма малого промежутка времени, развиваемая двигателем без каких-либо повреждений. Такая мощность определяется в большинстве случаев электрическими свойствами двигателя (максимальным моментом у асинхронных двигателей или условиями коммутации у двигателей постоянного тока), а иногда и механической конструкцией двигателя. Мгновенные перегрузочные свойства электродвигателя обычно характеризуются коэффициентом перегрузки по моменту λмом, т. е. отношением максимального кратковременно допустимого перегрузочного момента к номинальному: λиоы = Mmax/Мном. Для большинства электродвигателей λмом ≈ 2 (у специальных электродвигателей λ.мом = 3 ÷ 4). Часто по условиям работы привода важна перегружаемость электродвигателя не мгновенная, а на определенный, относительно короткий промежуток времени. В соответствии с этим требованием указывается кратковременная перегрузочная мощность двигателя (временная мощность) — мощность, развиваемая двигателем в течение определенного ограниченного промежутка времени (5, 10, 15, 30 мин и т. д.), после чего двигатель должен быть отключен на столько времени, чтобы он успел охладиться до температуры окружающей среды. Для одного и того же двигателя соотношения между его продолжительной, перегрузочной и кратковременной перегрузочной мощностями зависят от электрической характеристики и конструкции двигателя. 16.4. ВЫБОР МОЩНОСТИ ДВИГАТЕЛЯ ЭЛЕКТРОПРИВОДА Правильный выбор мощности электродвигателя для привода должен удовлетворять требованиям экономичности, производительности и надежности рабочей машины. Установка двигателя большей мощности, чем это необходимо по условиям привода, вызывает излишние потери энергии при работе машины, обусловливает дополнительные капитальные вложения и увеличение габаритов двигателя. Установка двигателя недостаточной мощности снижает производительность рабочей машины и делает ее работу ненадежной, а сам электродвигатель в подобных условиях легко может быть поврежден. Двигатель должен быть выбран так, чтобы его мощность использовалась возможно полнее. Во время работы двигатель должен нагреваться примерно до предельно допустимой температуры, но не выше ее. Кроме того, двигатель должен нормально работать при возможных временных перегрузках и развивать пусковой момент, требуемый данной рабочей машиной. В соответствии с этим мощность двигателя выбирается в большинстве случаев на основании условий нагревания (выбор мощности по нагреву), а затем производится проверка соответствия перегрузочной способности двигателя условиям пуска машины и временным перегрузкам. Иногда (при большой кратковременной перегрузке) приходится выбирать двигатель, исходя из требуемой максимальной мощности. В подобных условиях длительная мощность двигателя часто полностью не используется. Выбор мощности двигателя для привода с продолжительным режимом работы при постоянной или мало изменяющейся нагрузке на валу является простым. В этих условиях мощность двигателя должна быть равна мощности нагрузки, а проверки на нагрев и перегрузку во время работы не нужны. Однако необходимо проверить, достаточен ли пусковой момент двигателя для пусковых условий данной машины. Мощность продолжительной нагрузки ряда хорошо изученных механизмов определяется на основании проверенных практикой теоретических расчетов. Например, мощность двигателя (Р, кВт) для вентилятора где V— количество нагнетаемого или всасываемого воздуха, м3/с; ∆р — перепад, Па;ηвен —КПД вентилятора (у крыльчатых вентиляторов 0,2—0,35, у центробежных — до 0,8); ηпер — КПД передачи от двигателя к вентилятору. В приведенной формуле произведение V ∆р представляет собой полезную мощность вентилятора, а 1000 — коэффициент для перевода мощности в киловатты. Во многих случаях для расчета мощности двигателя приводов для продолжительного режима используются эмпирические формулы, проверенные длительной практикой. Для малоизученных приводов продолжительной нагрузки мощность двигателя часто определяется на основании удельного расхода энергии при выпуске продукции или экспериментально путем испытания привода. Выбор мощности двигателя при кратковременном и повторно-кратковременном режимах работы. При кратковременном, повторно-кратковременном и продолжительном с переменной нагрузкой режимах важно знать закон изменения во времени превышения температуры υ двигателя над температурой окружающей среды. Электрическая машина с точки зрения нагревания представляет собой весьма сложное тело. Тем не менее, при расчетах, не требующих большой точности, можно считать электрическую машину однородным телом. Это дает возможность применить к ней упрощенное уравнение нагревания где С — теплоемкость машины; Н — ее теплоотдача; Qo— теплота, выделяющаяся в машине в единицу времени. Далее, при Решая это уравнение методом разделения переменных, получаем: где τ = С/Н — постоянная времени нагрева машины, определяемая экспериментально. При t= 0 начальное превышение температуры υ =υ0, на основании чего постоянная А = υтах- υ0, а закон нарастания превышения температуры машины будет иметь вид: Таким образом, в данном случае, как и при υ0= 0, превышение температуры возрастает по показательному закону, стремясь к значению υmax.Значение начального превышения температуры лишь изменяет скорость изменения температуры, не изменяя характера процесса (рис. 16.5). П 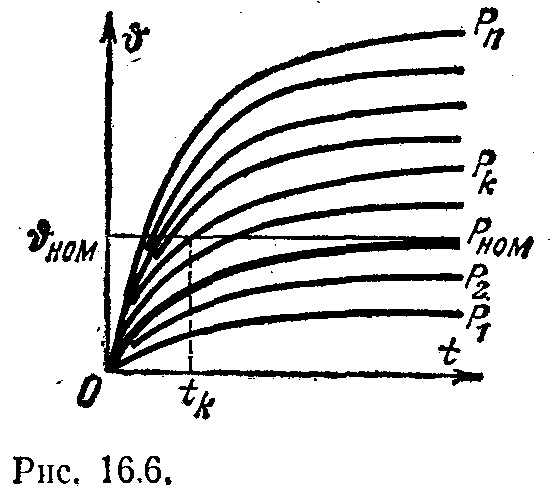 ри различных значениях продолжительной нагрузки одной и той же машины графики υ (t) будут отличаться лишь ординатами {рис. 16.6). Наибольшее допустимое для данной машины превышение температуры равно υном- Прямая, параллельная оси абсцисс, υ = = υмом, пересекаете различных точках кривые υ (t), соответствующие различным значениям нагрузки электродвигателя. ри различных значениях продолжительной нагрузки одной и той же машины графики υ (t) будут отличаться лишь ординатами {рис. 16.6). Наибольшее допустимое для данной машины превышение температуры равно υном- Прямая, параллельная оси абсцисс, υ = = υмом, пересекаете различных точках кривые υ (t), соответствующие различным значениям нагрузки электродвигателя.А  бсцисса точки пересечения определяет тот промежуток времени tк,- в течение которого мощность двигателя может быть временно равна мощности Pk, представляющей собой перегрузку по отношению к его номинальной мощности в продолжительном режиме. График нагревания, асимптотически приближающийся к υном. соответствует номинальной мощности двигателя Рном. При нагрузках, меньших Рном, мощность двигателя полностью не используется. Однако если двигатель загружается до номинальной мощности только на относительно короткое время, то по существу он тоже используется не полностью. Целесообразно его кратковременно перегрузить, и чем меньше продолжительность работы, тем больше должна быть эта перегрузка. Предел повышения нагрузки двигателя по мере уменьшения продолжительности включения определяется мгновенной перегрузочной мощностью двигателя, зависящей от его • электрических свойств (максимального момента у асинхронного двигателя, условий коммутации у машин постоянного тока и т. п.). При повторно-кратковременном режиме двигатель попеременно то нагревается, то охлаждается. Изменение его температуры в течение времени каждого цикла зависит при этом от предыдущего теплового состояния. бсцисса точки пересечения определяет тот промежуток времени tк,- в течение которого мощность двигателя может быть временно равна мощности Pk, представляющей собой перегрузку по отношению к его номинальной мощности в продолжительном режиме. График нагревания, асимптотически приближающийся к υном. соответствует номинальной мощности двигателя Рном. При нагрузках, меньших Рном, мощность двигателя полностью не используется. Однако если двигатель загружается до номинальной мощности только на относительно короткое время, то по существу он тоже используется не полностью. Целесообразно его кратковременно перегрузить, и чем меньше продолжительность работы, тем больше должна быть эта перегрузка. Предел повышения нагрузки двигателя по мере уменьшения продолжительности включения определяется мгновенной перегрузочной мощностью двигателя, зависящей от его • электрических свойств (максимального момента у асинхронного двигателя, условий коммутации у машин постоянного тока и т. п.). При повторно-кратковременном режиме двигатель попеременно то нагревается, то охлаждается. Изменение его температуры в течение времени каждого цикла зависит при этом от предыдущего теплового состояния.Г  рафик зависимости нагревания и охлаждения машины от времени в подобных условиях показан на рис. 16.7. Конечное превышение температуры каждой данной части цикла является начальным превышением температуры для последующей части цикла. Если во время той или иной части цикла наступает значительное изменение условий охлаждения (остановка двигателя или заметное изменение частоты вращения), то это изменяет τ = С/Н — постоянную времени нагрева двигателя, что должно быть учтено при построении графиков. рафик зависимости нагревания и охлаждения машины от времени в подобных условиях показан на рис. 16.7. Конечное превышение температуры каждой данной части цикла является начальным превышением температуры для последующей части цикла. Если во время той или иной части цикла наступает значительное изменение условий охлаждения (остановка двигателя или заметное изменение частоты вращения), то это изменяет τ = С/Н — постоянную времени нагрева двигателя, что должно быть учтено при построении графиков.Определение мощности двигателя по условиям нагревания посредством построения графиков нагревания (или соответствующим аналитическим методом) требует значительной затраты времени и не дает точных результатов. Здесь эти построения приведены лишь, чтобы наглядно показать картину изменения нагрева двигателя при переменной нагрузке. В большинстве случаев для такого выбора мощности двигателя применяются более простые методы, в частности эквивалентного тока. В основу метода эквивалентного тока положено допущение, что при переменной нагрузке двигателя его средние потери должны быть равны потерям при продолжительной (номинальной) нагрузке. Как известно, мощность потерь двигателя складывается из постоянных Рпост и переменных Рпер мощностей. Мощность постоянных потерь равна сумме мощности потерь на трение, в магнитопроводе (у асинхронных двигателей и двигателей постоянного тока с параллельным возбуждением), на возбуждение у синхронных двигателей и двигателей с параллельным возбуждением. Мощность переменных потерь можно считать пропорциональной квадрату рабочего тока I двигателя и сопротивлению соответствующей обмотки r, причем приближенно можно считать последнее постоянным. Если ток изменяется за соответствующие промежутки времени, то за все рабочее время I>t= Т суммарные потери энергии в двигателе будут: При эквивалентной неизменной нагрузке током Iэк за то же время Т потери энергии в двигателе должны быть равны: Нагревание двигателя, обусловленное потерями, в обоих случаях должно быть одинаковым. На этом основании определяем эквивалентный ток:  Зная эквивалентный ток, номинальное напряжение и номинальный коэффициент мощности, можно определить номинальную мощность двигателя: Метод эквивалентного тока можно применять лишь при условии постоянства мощности потерь в магнитопроводе и на трение, а также сопротивлений обмоток в течение всего рабочего времени. Такому условию, например, не удовлетворяет двигатель с последовательным возбуждением, у которого при изменениях нагрузки сильно изменяются поток и частота вращения (следовательно, мощность потерь в стали магнитопровода и на трение). В ряде случаев условия нагрузки определяют непосредственно момент, требуемый от двигателя, а не ток. В этих случаях можно пользоваться методом эквивалентного момента: у всех электродвигателей вращающий момент пропорционален произведению тока и потока. У двигателей переменного тока можно приближенно считать постоянным коэффициент мощности. Наконец, магнитный поток можно считать практически постоянным у всех двигателей, кроме двигателей с последовательным и смешанным возбуждением. При таких упрощениях можно считать вращающий момент где kвp— постоянная величина, откуда из (16.12) следует: По эквивалентному моменту и номинальной угловой скорости двигателя о>ном рассчитывается номинальная мощность двигателя Рном = Мвр,эк ω ном Выбрав номинальную мощность двигателя на основании расчета по методу эквивалентного тока или эквивалентного момента, необходимо затем проверить, достаточен ли максимальный момент Мтах двигателя для того, чтобы удовлетворить требованиям кратковременных перегрузок данного привода; иными словами, должно быть выполнено условие: коэффициент перегрузки двигателя λмом должен быть больше отношения максимального момента Мтахнагрузки к номинальному моменту двигателя, т. е. |