Синхронные машины. Синхронные машины 15 общие сведения
 Скачать 0.83 Mb. Скачать 0.83 Mb.
|

|
16.5. ВЫБОР ВИДА И ТИПА ДВИГАТЕЛЯ П 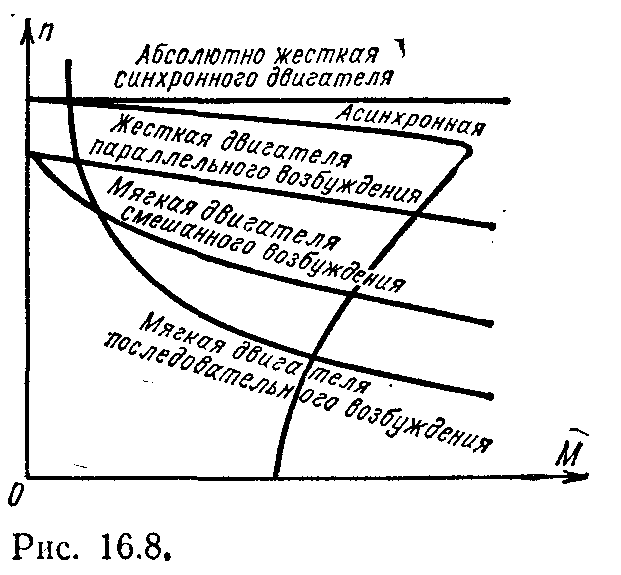 ри длительной неизменной нагрузке задача выбора вида двигателя (постоянного тока, асинхронного, синхронного) относительно проста. Для подобного привода, не требующего регулирования скорости, ПУЭ (Правила устройства электроустановок) рекомендуют независимо от мощности применять синхронные двигатели. Эта рекомендация объясняется тем, что современный синхронный двигатель пускается в ход так же, как асинхронный, а его габариты меньше и работа экономичнее, чем асинхронного двигателя той же мощности (выше cos ф, больше максимальный момент). ри длительной неизменной нагрузке задача выбора вида двигателя (постоянного тока, асинхронного, синхронного) относительно проста. Для подобного привода, не требующего регулирования скорости, ПУЭ (Правила устройства электроустановок) рекомендуют независимо от мощности применять синхронные двигатели. Эта рекомендация объясняется тем, что современный синхронный двигатель пускается в ход так же, как асинхронный, а его габариты меньше и работа экономичнее, чем асинхронного двигателя той же мощности (выше cos ф, больше максимальный момент).Но если электродвигатель должен работать в условиях регулируемой частоты вращения, частых пусков, набросов и сбросов нагрузки и т. п., то при выборе вида двигателя необходимо сопоставить условия привода с особенностями механических характеристик различных видов электродвигателей. Принято различать естественную и искусственную механические характеристики двигателя. Первая соответствует номинальным условиям его включения, нормальной схеме соединений и отсутствию каких-либо добавочных элементов в цепях двигателя. Искусственные характеристики получаются при изменении напряжения на двигателе, включении добавочных элементов в цепи двигателя и соединении этих цепей по специальным схемам. На рис.16.8 сопоставлены уже известные нам естественные механические характеристики различных двигателей. Важным критерием для оценки механических характеристик служит их жесткость: Жесткость может быть различной для отдельных участков характеристики. В зависимости от значения жесткости принято делить механические характеристики на абсолютно жесткие, ∆η= 0, α = ∞ (синхронные двигатели), жесткие, у которых изменение частоты вращения мало а = 40 ÷ 10 (линейная часть характеристики асинхронного двигателя, характеристика двигателя параллельного возбуждения), мягкие с большим изменением частоты вращения, у которых а ≤ 10 (характеристика двигателя последовательного возбуждения, искусственная характеристика асинхронного двигателя с фазным ротором, искусственная характеристика двигателя постоянного тока параллельного возбуждения). Требования к жесткости механической характеристики в ряде случаев являются основанием для выбора вида двигателя. Например, для подъемно-транспортных механизмов желательна мягкая характеристика, а для холодной прокатки стали нужна очень жесткая характеристика. При частых пусках и непостоянной нагрузке наиболее надежным и простым в эксплуатации и вместе с тем дешевым является асинхроный двигатель с короткозамкнутым ротором. Двигатель с фазным ротором дороже, его обслуживание сложнее, габариты больше, a cos φ меньше (из-за большего воздушного зазора). Преимущества фазного ротора в отношении пускового момента незначительны по сравнению с короткозамкнутым ротором, имеющим двойное беличье колесо. Поэтому двигатели с контактными кольцами устанавливаются лишь при наличии особых требований к пусковому моменту или к пусковому току (требований, связанных с ограниченной мощностью трансформаторной подстанции и характером подключенных к ней приемников). Таким образом, наиболее распространенным двигателем для мощностей до 100 кВт при нерегулируемом приводе является асинхронный короткозамкнутый двигатель. При больших мощностях, если невозможно применить короткозамкнутый асинхронный двигатель, устанавливается асинхронный двигатель с фазным ротором. Для регулирования частоты вращения двигателя в недалеком прошлом для асинхронных двигателей применялись широко только два существенно несовершенных метода: включение резисторов в цепи ротора и переключение числа пар полюсов обмотки статора. Но первый метод экономически оправдан лишь при узких пределах регулирования при постоянстве момента на валу двигателя, а второй обеспечивает, лишь ступенчатое регулирование и практически применяется для металлорежущих станков при небольших мощностях. В настоящее время положение существенно изменилось благодаря появлению силовых полупроводниковых преобразователей. Они дают возможность преобразовывать частоту переменного тока, что позволяет плавно и в широких пределах регулировать угловую скорость вращающегося магнитного поля, а следовательно, экономично и плавно регулировать частоту вращения асинхронного и синхронного двигателей. Двигатель постоянного тока стоит значительно дороже, требует большего ухода и изнашивается быстрее, чем двигатель переменного тока. Тем не менее в ряде случаев предпочтение отдается двигателю постоянного тока, позволяющему простыми средствами изменять частоту вращения электропривода в широких пределах (3:1; 4:1 и более). Все же и в этих случаях система генераторный преобразователь — двигатель (Г — Д), обеспечивающая особенно широкие пределы регулирования, в новых установках заменяется тиристорными преобразователями более экономичными и компактными. В качестве примеров приводов, для которых рекомендуется постоянный ток, назовем следующие: в металлургической промышленности — реверсивные прокатные станы, регулируемые нереверсивные станы при многодвигательном приводе, вспомогательные механизмы повторно-кратковременного режима работы, доменные подъемники; в металлообрабатывающей промышленности — токарные специальные станки. Конструкцию (тип) двигателя выбирают в зависимости от условий окружающей среды. Приходится учитывать необходимость защиты среды от возможных искрообразований в двигателе (при наличии горючей пыли, взрывоопасных смесей и т. п.), а также самих двигателей от попадания в них влаги, пыли, агрессивных химических веществ из окружающей среды. Различают несколько основных типов конструкции двигателей. Открытый тип двигателя с большими вентиляционными отверстиями в подшипниковых щитах и станине для лучших условий охлаждения целесообразно применять в немногих случаях; приходится считаться с легкостью засорения такого двигателя в производственных условиях и опасностью поражения током обслуживающего персонала при прикосновении к открытым токоведущим частям. Двигатели защищенного типа имеют вентиляционные отверстия, которые закрыты решетками, защищающими двигатель от попадания внутрь капель дождя, посторонних частиц, опилок и т. п., но не пыли. Такие двигатели могут устанавливаться на открытом воздухе. Двигатели закрытого типа устанавливаются в запыленных помещениях при наличии в воздухе паров, едких, испарений и т. п. Для улучшения охлаждения таких двигателей применяется продувание охлаждающего воздуха. Последний подводится и отводится по специальным воздухопроводам. В сырых помещениях применяются защищенные двигатели со специальной влагостойкой изоляцией. Во взрывоопасных помещениях, содержащих горючие газы или пары, устанавливаются взрывозащищенные двигатели. 16.6. ТИРИСТОРНОЕ УПРАВЛЕНИЕ ЭЛЕКТРОПРИВОДОМ О 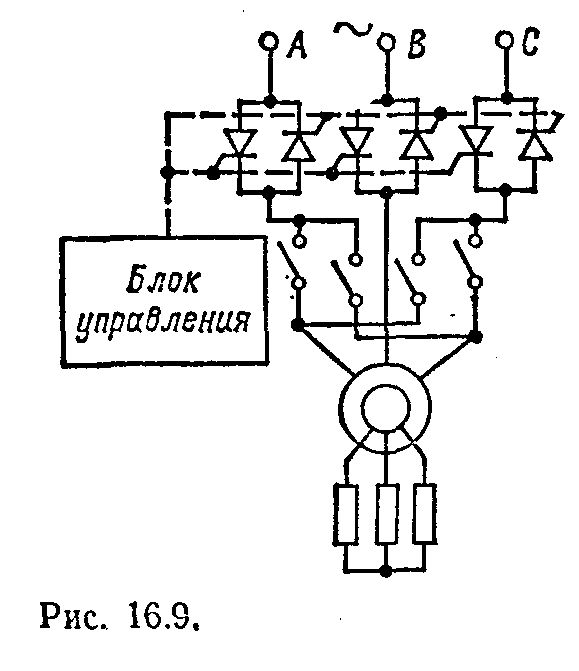 сновными факторами, обусловившими быстрое развитие тиристорного электропривода, являются следующие: высокий КПД тиристорного преобразователя (0,95—0,97), относительно малые габариты, масса и инерционность тиристоров, незначительная мощность устройств управления. сновными факторами, обусловившими быстрое развитие тиристорного электропривода, являются следующие: высокий КПД тиристорного преобразователя (0,95—0,97), относительно малые габариты, масса и инерционность тиристоров, незначительная мощность устройств управления.Использование тиристоров и соответствующих систем управления позволяет получать все требуемые регулировочные характеристикии динамические режимы двигателей как переменного, так и постоянного тока. Тиристорный электропривод переменного тока. Для регулирования частоты вращения асинхронного двигателя тиристоры включаются в цепь статора или ротора. В первом случае с их помощью можно регулировать амплитуду (фазное регулирование) или частоту (частотное регулирование) синусоидального напряжения на обмотках статора и, следовательно, вращающий момент на валу двигателя (14.35). Во втором случае можно изменять активное сопротивление цепи ротора и таким образом (рис. 14.25) регулировать его частоту вращения. На рис. 16.9 приведена схема преобразователя (регулятора) переменного напряжения на обмотках статора асинхронного двигателя с двумя встречно-параллельными тиристорами в каждой фазе. Устройство управления синхронно открывает тиристоры в порядке чередования фаз. Изменяя момент времени включения тиристоров (рис. 10.17), можно регулировать амплитуду напряжения основной гармоники. Выключение тиристоров осуществляется автоматически при изменении полярности напряжения соответствующей фазы. Такой режим называется естественной коммутацией. И 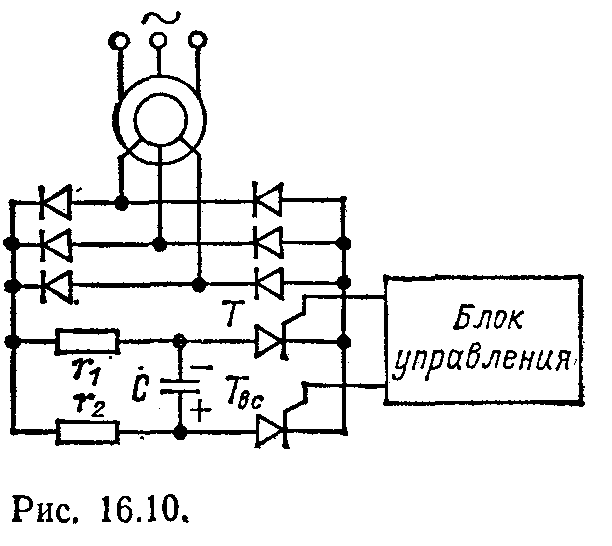 скусственной коммутацией называется выключение тиристора посредством подключения к его выводам какого-либо источника энергии, создающего в нем ток обратного направления. Примером может служить тиристорное управление в цепи ротора асинхронного двигателя (рис. 16.10). Рабочий тиристор Т, замыкающий цепь выпрямленного тока через резистор r1имеет узел искусственной коммутации. Узел искусственной коммутации содержит вспомогательный тиристор Tвс, резистор г2 и конденсатор С. скусственной коммутацией называется выключение тиристора посредством подключения к его выводам какого-либо источника энергии, создающего в нем ток обратного направления. Примером может служить тиристорное управление в цепи ротора асинхронного двигателя (рис. 16.10). Рабочий тиристор Т, замыкающий цепь выпрямленного тока через резистор r1имеет узел искусственной коммутации. Узел искусственной коммутации содержит вспомогательный тиристор Tвс, резистор г2 и конденсатор С.Пусть первоначально рабочий тиристор Т открыт, а вспомогательный Твсзакрыт. В это время конденсатор С заряжается через резистор г2 так, как показано на рис. 16.10. Подадим теперь на управляющий электрод вспомогательного тиристора Твсотпирающий сигнал из устройства управления. Вспомогательный тиристор включится, и конденсатор начнет разряжаться через него и рабочий тиристор. Так как при этом разрядный ток конденсатора направлен навстречу прямому току рабочего тиристора, то последний выключается. После этого конденсатор перезаряжается через резистор r1и открытый вспомогательный тиристор. Чтобы вновь включить рабочий тиристор, на его управляющий электрод надо подать сигнал из устройства управления. При этом конденсатор своим разрядным током выключает вспомогательный тиристор, а сам конденсатор перезаряжается, возвращаясь к состоянию, показанному на рисунке. Следующий цикл начинается с подачи сигнала из устройства управления на управляющий электрод вспомогательного тиристора. Э 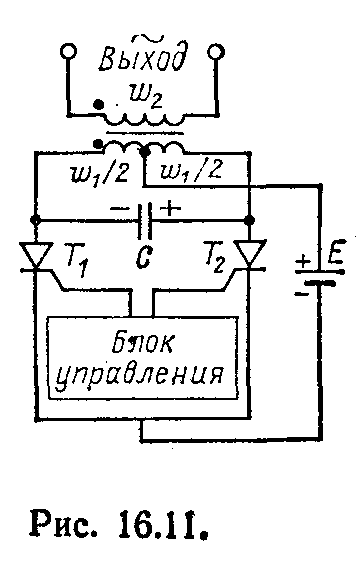 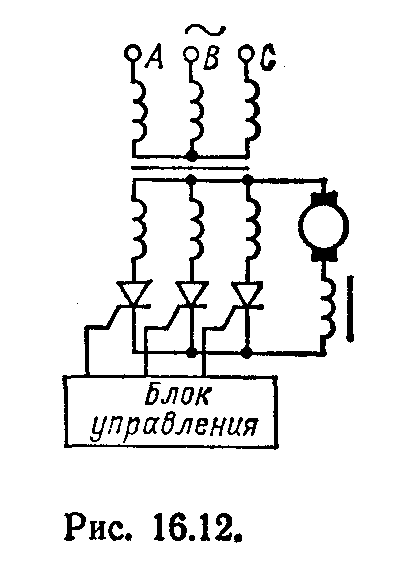 квивалентное сопротивление цепи ротора зависит от отношения интервалов времени открытого и закрытого состояний рабочего тиристора. Регулируя это отношение, можно регулировать среднее значение тока ротора и, следовательно, момент, развиваемый асинхронным двигателем. квивалентное сопротивление цепи ротора зависит от отношения интервалов времени открытого и закрытого состояний рабочего тиристора. Регулируя это отношение, можно регулировать среднее значение тока ротора и, следовательно, момент, развиваемый асинхронным двигателем.Одним из наиболее перспективных способов регулирования частоты вращения асинхронных двигателей является изменение частоты напряжения на обмотках статора. Для этой цели широко используются тиристорные автономные инверторы, т. е. устройства преобразования постоянного напряжения в переменное с любым числом фаз. Рассмотрим простейшую схему однофазного автономного инвертора (рис. 16.11), в которой источник постоянного напряжения Е соединен со средней точкой первичной обмотки трансформатора. Когда тиристор T1 включается сигналом блока управления, а тиристор Т2закрыт, то источник постоянного напряжения Е подключается к левой половине первичной обмотки трансформатора. Ток этой части •первичной обмотки возбуждает магнитный поток в магнитопроводе трансформатора. При этом во вторичной обмотке трансформатора индуктируется ЭДС, а конденсатор С заряжается, как показано на рисунке. Если управляющий сигнал включает тиристор Т2, то перезарядка конденсатора С закрывает тиристор T1 аналогично рис. 16.10, а источник постоянного напряжения Е подключается к правой половине первичной обмотки. В магнитопроводе возбуждается магнитный поток противоположного направления, чему соответствует и изменение направления ЭДС, индуктируемой во вторичной обмотке ω2. Частота переменного напряжения, получаемого от инвертора, определяется частотой генератора управляющих сигналов, включающих поочередно тиристоры. Описанный инвертор может быть использован для плавной регулировки частоты вращения однофазных и двухфазных асинхронных двигателей (см. § 14.18). Инвертирование постоянного напряжения в трехфазную или многофазную систему напряжений осуществляется аналогично. Обычно в инверторе вместо источника постоянного напряжения Е используется выпрямленное напряжение сети переменного тока. Если для этой цели, так же как и для инвертирования, использовать тиристоры, то выпрямленное напряжение можно регулировать в широких пределах (см. рис. 10.17). Это дает дополнительные возможности для управления асинхронным двигателем. Устройства, сочетающие в себе тиристорные выпрямители и тиристорные инверторы, принято называть шириапорными преобразователями. В электроприводе иногда используют и более сложные тиристорные преобразователи, например тиристорные выпрямитель — инвертор — выпрямитель. Применение различных способов тиристорного управления позволяет плавно и экономично регулировать частоту вращения асинхронных двигателей в диапазоне до 50 : 1 и выше. Тиристорный электропривод постоянного тока. При необходимости регулирования частоты вращения двигателя постоянного тока и получения специальных характеристик в настоящее время широко используются тиристорные преобразователи. С их помощью двигатели постоянного тока можно подключить к сети переменного тока. Одна из простейших схем включения двигателя постоянного тока в трехфазную цепь переменного тока приведена на рис. 16.12. Управляющее устройство синхронно включает тиристоры в порядке чередования фаз в положительные полупериоды фазных напряжений (рис. 10.17). В отрицательные полупериоды фазных напряжений происходит естественная коммутация, и тиристоры соответствующих фаз закрываются. Среднее значение выпрямленного напряжения трех фаз равно напряжению на якоре двигателя постоянного тока (10.10): где α — угол запаздывания включения тиристоров. Изменяя угол запаздывания с помощью блока управления, можно изменять постоянное напряжение на якоре двигателя, т. е. постоянный ток в цепи якоря Iя. В свою очередь это приводит к изменению вращающего момента на валу двигателя (13.2). Индуктивная катушка в цепи якоря служит для уменьшения пульсаций тока. АППАРАТУРА УПРАВЛЕНИЯ И ЗАЩИТЫ 17.1. ОБЩИЕ СВЕДЕНИЯ Управление электротехническими устройствами осуществляется с помощью большого числа различных аппаратов. В зависимости от назначения их можно подразделить на две основные группы: коммутационные аппараты (высоковольтные выключатели, разъединители, контакторы и др.) и защитные аппараты ( 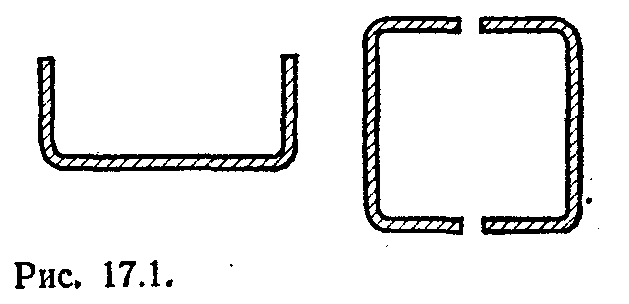 автоматические воздушные выключатели, плавкие предохранители, различные реле и разрядники для защиты от перенапряжений). автоматические воздушные выключатели, плавкие предохранители, различные реле и разрядники для защиты от перенапряжений).Все эти аппараты в местах установки соединяются по определенным схемам посредством голых шин, укрепленных на изоляторах, или посредством силовых кабелей. Монтаж и эксплуатация неизолированных шин проще и дешевле, кроме того, для них допускается большая плотность тока. В большинстве случаев прокладываются алюминиевые шины; стальные шины применяются в установках с токами не выше 200 А. Алюминиевые шины применяются однополосные и многополосные прямоугольного сечения с размерами полосы примерно 120 X 10 мм. Для больших переменных токов часто устанавливаются шины коробчатого сечения (рис. 17.1). Их преимущества — механическая прочность и простота монтажных работ. Кроме того, благодаря расположению проводящего материала по периферии общего сечения в коробчатых шиная при промышленной частоте мало сказываются поверхностный эффект и эффект близости, уменьшающие активное сечение проводника. Шины укрепляются на опорных изоляторах. На прямолинейных участках проводки, в промежутках между креплениями шин к изоляторам, предусматриваются специальные устройства, обеспечивающие свободное удлинение шин при нагревании (шинные компенсаторы). В трехфазных системах в соответствии с последовательностью фаз шины должны быть окрашены в следующие цвета: фаза А — желтый, фаза В — зеленый и фаза С — красный; нейтральные шины: при изолированной нейтрали —белый; при заземленной нейтрали — черный. При постоянном токе положительная шина окрашивается в красный, отрицательная — в синий, а нейтраль — в белый цвет. Для надежной работы электрических аппаратов весьма важными являются условия осуществления контактов. Последние могут быть жесткими (неразъемными), например присоединения проводников к выводам машины или аппарата; скользящими между неподвижными и подвижными токоведущими частями; коммутационные — в отключающих аппаратах. Эти контакты работают в наиболее тяжелых условиях, особенно если они должны отключать токи коротких замыканий. П 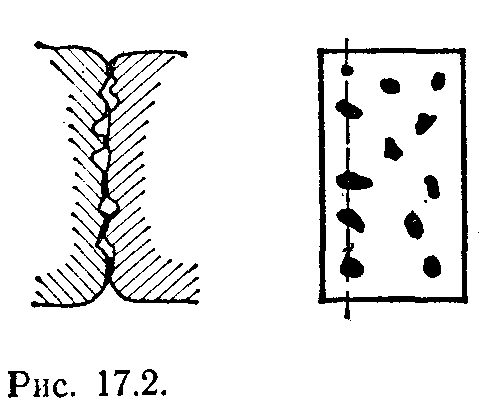 ри всяком контакте действительное соприкосновение двух проводящих тел осуществляется в виде элементарных площадок касания, возникающих при смятии выступающих микроскопических бугорков касающихся поверхностей (рис. 17.2). Следовательно, имеет место сужение поперечного сечения пути тока. Дополнительное сопротивление, обусловленное этим сужением, называется переходным сопротивлением контакта. Оно тем меньше, чем больше сила нажатия контактов, увеличивающая смятие микроскопических бугорков. ри всяком контакте действительное соприкосновение двух проводящих тел осуществляется в виде элементарных площадок касания, возникающих при смятии выступающих микроскопических бугорков касающихся поверхностей (рис. 17.2). Следовательно, имеет место сужение поперечного сечения пути тока. Дополнительное сопротивление, обусловленное этим сужением, называется переходным сопротивлением контакта. Оно тем меньше, чем больше сила нажатия контактов, увеличивающая смятие микроскопических бугорков.Переходное сопротивление контакта может возрастать в десятки и сотни раз вследствие окисления контактных поверхностей. В частности, нередко такое отклонение вызывается нагревом контактов свыше 70—75 °С. По этой причине необходимо предусматривать все возможные меры для предупреждения нагревания и окисления Отключение электрической цепи обычно не может быть мгновенным. При разрыве цепи тока неизбежно возникновение большей или меньшей ЭДС самоиндукции; под действием этой ЭДС совместно с напряжением сети промежуток между расходящимися контактами пробивается и возникает электрическая дуга. Высокая температура последней может вызвать быстрое разрушение или сваривание контактов. Особенно опасно действие дуги в аппаратах высокого напряжения при отключениях токов короткого замыкания. Отключение цепей, переменного тока существенно упрощается, так как переменный ток периодически проходит через нулевое значение, что приводит к гашению дуги. Выключатель переменного тока должен быть сконструирован так, чтобы предотвратить повторное зажигание дуги, после того как она погасла при прохождении через нуль переменного тока. Значительно труднее отключение цепей постоянного тока высокого напряжения. Выключатели для этого тока должны быть рассчитаны на поглощение весьма значительной энергии, выделяющейся при длительном горении дуги постоянного тока. |