Пояснительная записка курсовой работе по ТММ. Синтез и анализ механизмов
 Скачать 1.13 Mb. Скачать 1.13 Mb.
|

|
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ «КАЗАНСКИЙ НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ ИМ. А.Н. ТУПОЛЕВА-КАИ» Институт авиации наземного транспорта и энергетики Кафедра Машиноведения и инженерной графики 24.05.02 Проектирование авиационных и ракетных двигателей КУРСОВАЯ РАБОТА по дисциплине «Теория механизмов и машин» На тему: «Синтез и анализ механизмов» Выполнил: студент группы №1242 Ахметзянов А.Р. _____________ (подпись, дата) Руководитель: доцент Мудров А.П. _____________ (подпись, дата) Курсовая работа зачтена с оценкой _____________ Казань 2020 г. MINISTRY OF EDUCATION AND SCIENCE OF THE RUSSIAN FEDERATION FEDERAL STATE BUDGETARY EDUCATIONAL INSTITUTION OF HIGHER EDUCATION "KAZAN NATIONAL RESEARCH TECHNICAL UNIVERSITY NAMED AFTER A.N. TUPOLEV" Aviation Institute of Ground Transport and Energy Department of Mechanical Engineering and Engineering Graphics 24.05.02 Design of aircraft and rocket engines COURSE WORK on discipline "Theory of mechanisms and machines" On the topic: "Analysis and synthesis of mechanisms" The student № 1242 Akhmetzyanov A.R. _____________ (signature, date) Head Associate Professor Mudrov A.P. ______________ (signature, date) Course work (project) credited (read) with the assessment __________________ Kazan 2020 АННОТАЦИЯ Курсовая работа по дисциплине «Теория механизмов и машин» состоит из двух частей: «Анализ и синтез механизмов» и «Анализ и синтез планетарных передач». Варианты работ 2 и 1041 соответственно. В ходе выполнения первой части работы были: Определены недостающие параметры приведенного в задании механизма; Выполнена схема механизма в 12 положениях в заданном масштабе; Для двух положений механизма (2,6) построены планы скоростей и ускорений; Для 6-го положения определены силы в кинематических парах, а также внешний момент М1, приложенный к кривошипу; Построены траектории центров масс звеньев 2, 3 и 4; При помощи рычага Н.Е Жуковского определен внешний момент; В ходе выполнения второй части работы были: Определены типы ступеней, применяемых при синтезе и анализе планетарной передачи; Рассчитано общее передаточное отношение редуктора; Выполнена разбивка общего передаточного отношения редуктора по ступеням; Определено число зубьев колес; Определены габариты редуктора; Определено число оборотов зубчатых колес. ANNOTATION Course work in the discipline "Theory of Mechanisms and Machines" consists of two parts: "Analysis and synthesis of mechanisms" and "Analysis and synthesis of planetary gears." Options for work 2 and 1041 respectively. In the course of the first part of the work were: Defined the missing parameters given in the task mechanism; The scheme of the mechanism in 12 positions at a given scale; For two positions of the mechanism (2,6), plans of velocities and accelerations are constructed; For the 6th position, the forces in kinematic pairs are determined, as well as the external moment M1 applied to the crank; The trajectories of the centers of mass of links 2,3 and 4 are constructed With the help of the N.E. Zhukovsky lever, an external moment is defined; In the course of the second part of the work were: The types of stages used in the synthesis and analysis of planetary gear; Calculated the total gear ratio of the gearbox; A breakdown of the overall gear ratio of the gear unit into steps; The number of teeth of the wheels; Determined the dimensions of the gearbox; The number of revolutions of the gears. СОДЕРЖАНИЕ стр. 1. Шарнирно-рычажный механизм……………………………………………. 6 1.1 Задание………………………………………………………………………. 6 1.2 Синтез механизма……………………………………………………………7 1.2.1 Структурный анализ механизма…………………………………………. 8 1.3 Кинематический анализ……………………………………………………. 9 1.3.1 Определение скоростей точек и угловых скоростей звеньев……….... 9 1.3.2 Определение ускорений точек и угловых ускорений звеньев………. 15 1.3.3 Определение радиусов кривизны……………………………………… 25 1.4 Силовой анализ……………………………………………………………... 27 1.5 Определение внешнего момента рычагом Жуковского…………………. 31 2. Многозвенный зубчатый механизм………………………………………….32 2.1 Задание………………………………………………………………………..32 2.2 Синтез механизма……………………………………………………………33 2.3 Кинематический анализ механизма………………………………………. 37 ЗАДАНИЕ  1.2 СИНТЕЗ МЕХАНИЗМА Механизм состоит из 6 звеньев: 1 - кривошип; 2 - шатун; 3 - балансир; 4 - шатун; 5 - кулиса; 6 - стойка (неподвижное звено). Заданы длиныlCD, lCB и l4, ход балансира β и одна из угловых координат γ, а также масштаб длины Kl. Требуется определить длины кривошипа l1 , шатуна l2 и       , , . .   мм, мм, мм, мм, . .И длины этих звеньев будут:    Используя программу «КОМПАС-3D V16.1», достраиваем все 12 положений для данного механизма. 1.2.1 СТРУКТУРНЫЙ АНАЛИЗ МЕХАНИЗМА Схема механизма приведена на рисунке 1. 1 - кривошип; 2 - шатун; 3 - балансир; 4 - шатун; 5 - кулиса; 6 - стойка (неподвижное звено). 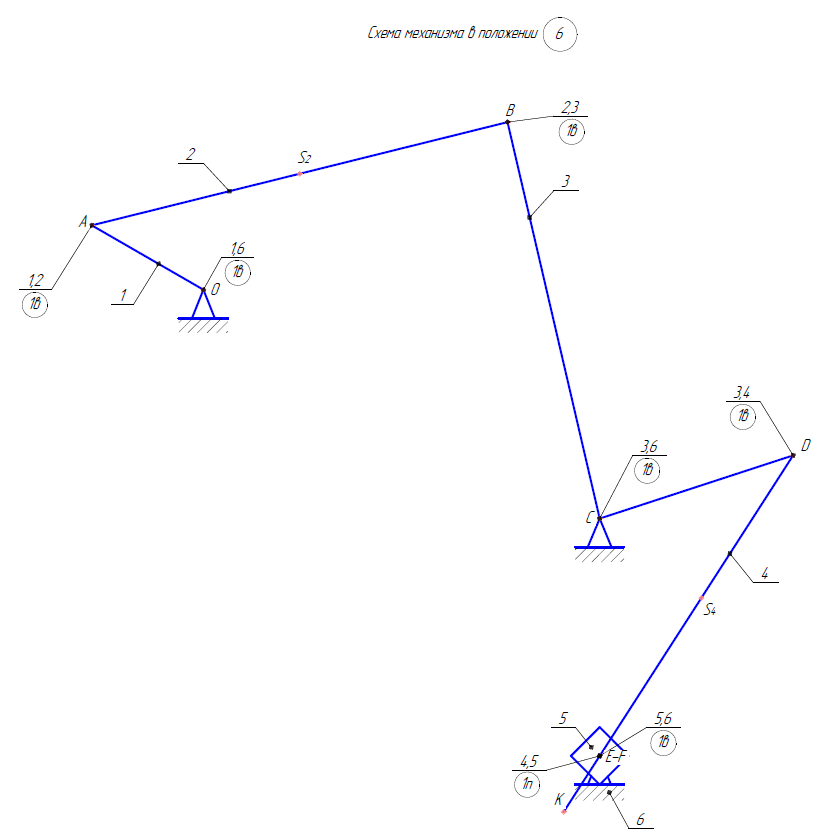 Весь механизм состоит из первичного механизма, составленного звеньями 1 и 6, 1-й группы Ассура 2 класса (ВВВ) (звенья 2 и 3), 2-й группы Ассура 2 класса (ВПВ) (звенья 4 и 5). Весь механизм состоит из первичного механизма, составленного звеньями 1 и 6, 1-й группы Ассура 2 класса (ВВВ) (звенья 2 и 3), 2-й группы Ассура 2 класса (ВПВ) (звенья 4 и 5). Степень подвижности механизма определяется по формуле (1.1), где n – количество звеньев в механизме, p5 – количество одноподвижных пар 5-го класса,  рис. 1 p4 – количество двухподвижных кинематических пар. В нашем случае: p5 = 7, p4=0, n=6:  Рис. 1   Это показывает, что в нашем механизме отсутствуют звенья с избыточными связями. То есть, при движении ведущего звена остальные звенья приобретают вполне определенные движения. 1.3 КИНЕМАТИЧЕСКИЙ АНАЛИЗ
1.3.1. ОПРЕДЕЛЕНИЕ СКОРОСТЕЙ ТОЧЕК И ЗВЕНЬЕВ МЕХАНИЗМА Построим план скоростей в масштабе  для положения 2. Определим направление вектора и величину скорости кривошипа 1. Для этого воспользуемся формулой: для положения 2. Определим направление вектора и величину скорости кривошипа 1. Для этого воспользуемся формулой:  VА направлена по касательной к траектории точкиA в сторону угловой скорости. Чертим данную скорость в масштабе на плане скоростей. Скорость точки В определяется из следующего векторного уравнения:  где  перпендикулярен ВС, перпендикулярен ВС,  перпендикулярен BA. Построим на плане скоростей прямые, известные по направлению. Прямая для скорости перпендикулярен BA. Построим на плане скоростей прямые, известные по направлению. Прямая для скорости  откладывается от точки p, а прямая для скорости откладывается от точки a, и точка их пересечения - является скоростью . Начертим данную скорость в масштабе на плане скоростей. Их величины найдем по формулам: откладывается от точки p, а прямая для скорости откладывается от точки a, и точка их пересечения - является скоростью . Начертим данную скорость в масштабе на плане скоростей. Их величины найдем по формулам:  С помощью векторного уравнения, находим скорости центров масс и отмечаем их на плане скоростей:     Найдем скорость точки  . Для этого отметим на звене СВ точку . Для этого отметим на звене СВ точку  так, что так, что   параллельна параллельна   Так как угол между  будет равен будет равен  (слева от звена CB): (слева от звена CB):  Так как точка  находится на звене ED, то находится на звене ED, то   Графически находим   Находим скорость точки D.    перпендикулярен DС перпендикулярен DС Скорость точки E определим из следующего векторного уравнения:  где перпендикулярен CD,  перпендикулярен ED. перпендикулярен ED. Графически определяем  = 7,2392 мм, = 7,2392 мм,  = 11,4659 мм = 11,4659 мм  Угловые скорости звеньев 2, 3, 4 и 5 найдем по формулам:    Угловая скорость  направлена по часовой стрелке. Угловые скорости направлена по часовой стрелке. Угловые скорости  направлены против часовой стрелки. направлены против часовой стрелки.Теперь построим план скоростей для положения 6 в масштабе =0,05. Скорость кривошипа известна и равна VА = 3,8 м/с.С помощью векторных уравнений (согласно формулам (9) - (30), но с другими значениями), находим скорости и отмечаем их на плане скоростей: Скорость точки В определяется из уравнения (9):  , ,       Графически находим   Найдем скорость точки . Для этого отметим на звене СВ точку так, что параллельна  Так как угол между будет равен (слева от звена CB) Найдем скорость точки D.   Скорость точки E определим из следующего векторного уравнения:  где перпендикулярен CD, перпендикулярен ED. Графически определяем =20,4571 мм, = 16,6557 мм = 0,05 * 16,6557 = 0,833 м/с = 0,05 * 16,6557 = 0,833 м/с = 0,05 * 20,4571 = 1,023 м/с = 0,05 * 20,4571 = 1,023 м/сНайдем скорость точки . Так как точка находится на звене ED (ED=0,51 м), то   Графически находим   Угловые скорости звеньев 2, 3, 4 и 5 найдем по формулам:    Угловые скорости  направлены против часовой стрелки. направлены против часовой стрелки.Таблица 1 – Результаты вычислений скоростей точек звеньев.
Таблица 2 – Результаты вычислений угловых скоростей звеньев.
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
























