Электропривод. Синтез системы управления двигателем постоянного тока с регуляторами класса входвыход в программной среде Mexbios
 Скачать 1.19 Mb. Скачать 1.19 Mb.
|

|
М  инистерство науки и высшего образования Российской Федерации инистерство науки и высшего образования Российской ФедерацииФедеральное государственное автономное образовательное учреждение высшего образования «Пермский национальный исследовательский политехнический университет» Кафедра микропроцессорных средств автоматизации Синтез системы управления двигателем постоянного тока с регуляторами класса «вход-выход» в программной среде MexBIOS Методическое руководство к выполнению Лабораторной работы № 2 по учебной дисциплине “Системы управления электроприводом” Составил: д.т.н., профессор кафедры МСА Казанцев В.П. Пермь, 2022 г. Цели работы: Синтез системы управления двигателем постоянного тока (ДПТ) с регуляторами класса «вход-выход» по принципу подчиненного регулирования в программной среде MexBIOS. Краткие теоретические сведения и описание работы: 1. Расчет параметров двигателя Математическое описание двигателя постоянного тока с постоянным возбуждением можно представить в следующем виде:  , (1) , (1)где EТП – ЭДС источника питания; i, M, ω– координаты следящего электропривода: ток, электромагнитный момент и скорость соответственно; RЯЦ – сопротивление якорной цепи; LЯЦ – индуктивность якорной цепи; С – постоянная двигателя; МС – момент на валу двигателя; J – момент инерции двигателя. На рисунке 1 представлена схема, соответствующая математическому описанию (1). 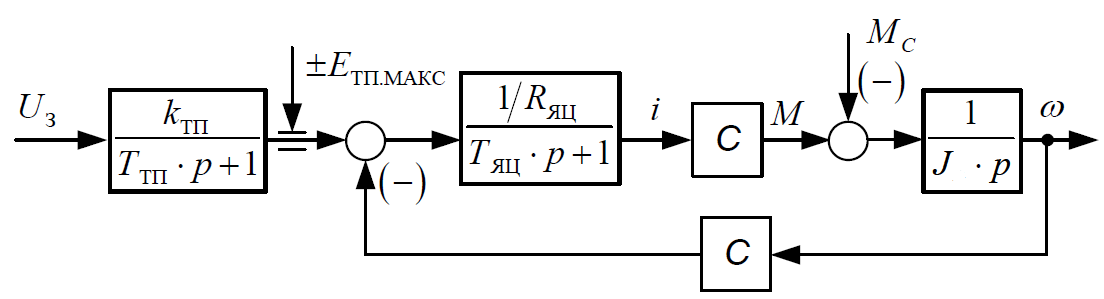 Рисунок 1 – Структурная схема двигателя постоянного тока с питанием от транзисторного преобразователя На рисунке 1 обозначены:  – передаточная функция транзисторного преобразователя с широтно-импульсной модуляцией (ШИМ); – передаточная функция транзисторного преобразователя с широтно-импульсной модуляцией (ШИМ); – передаточная функция якорной цепи. – передаточная функция якорной цепи.Для настройки системы управления необходимо знать параметры двигателя. Часть параметров дана в таблице с вариантами (таблица 1), другие необходимо рассчитать самостоятельно по представленным ниже формулам. Таблица 1. Параметры ДПТ для заданных вариантов
 . (3) . (3)2. Настройка контура тока Структурная схема контура тока представлена на рисунке 2 (а). Здесь инерционность преобразователя учтена за счет введения апериодического звена, но не учтена его дискретность и квантование по времени. Обратная связь представлена в общем виде коэффициентом kT. Данный контур теоретически можно настроить по методике Кесслера на модальный оптимум, обеспечивая предельное быстродействие при перерегулировании на уровне 4,3%, приняв за малую некомпенсируемую постоянную времени величину  . (4) . (4)Также при настройке системы необходимо сделать следующее допущение – обратную связь считаем безынерционной и настроенной на коэффициент kT = 1, требуемая полоса пропускания в контуре тока fУ.Т. = 200 Гц. 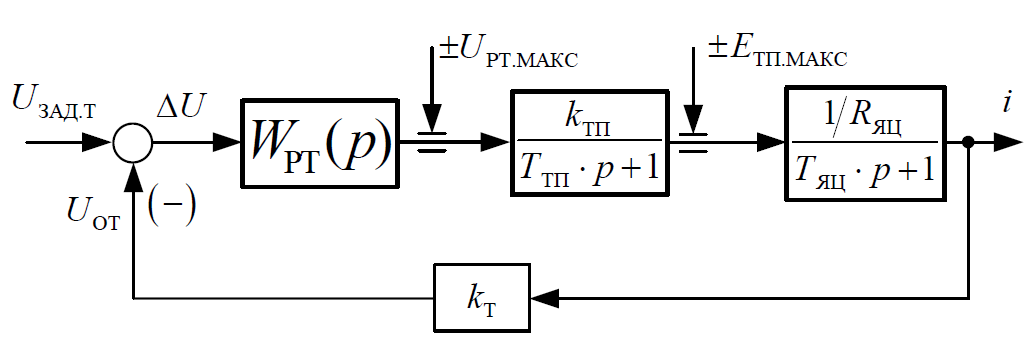 (а) 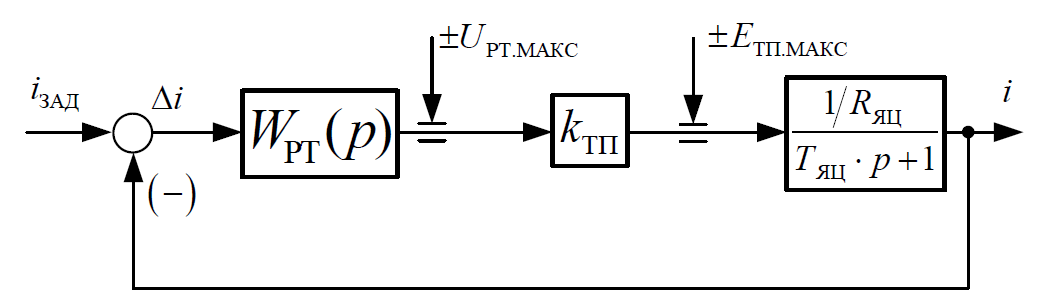 (б) Рисунок 2 – Структурная схема контура тока Контур на рисунке 2 (б) можно настроить на апериодический процесс. Передаточная функция объекта управления контура тока:  , (5) , (5)желаемые передаточные функции замкнутого и разомкнутого контуров тока:  , (6) , (6) , (7) , (7)где TT = 1/ωУ.Т. = 1/(2π⋅200) = 0,8⋅10-3 – желаемая постоянная времени контура тока (данная величина одинакова для всех вариантов). Определяем тогда передаточную функцию регулятора тока:  . (8) . (8)Передаточная функция соответствует ПИ-регулятору:  . (9) . (9)Определяем параметры регулятора:  . (11) . (11)Для дискретной модели регулятора необходимо дополнительно выполнить расчет коэффициента интегральной составляющей:  , (12) , (12)где dt = TS – шаг расчета системы управления по времени. 3. Настройка контура скорости Настройку контура скорости произведем на симметричный оптимум. Структурная схема контура скорости с ПИ-регулятором скорости и замкнутым контуром тока (6), оптимизированным выше, показана на рисунке 3. 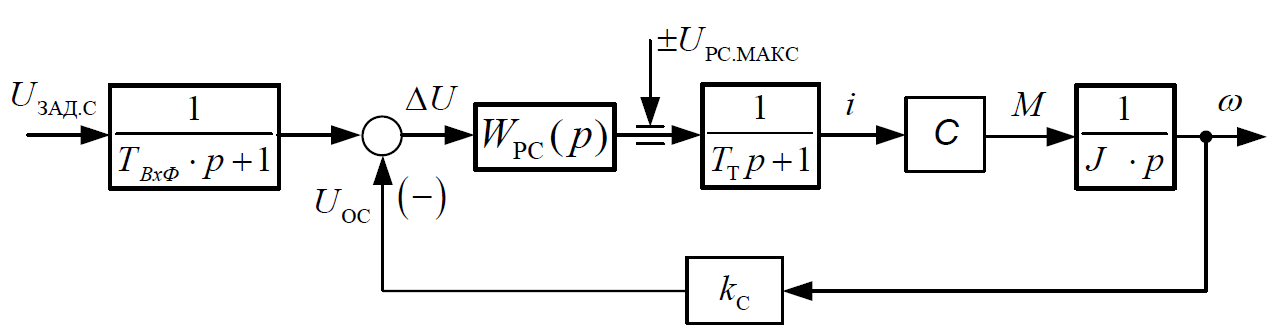 Рисунок 3 – Структурная схема контура скорости Малая некомпенсируемая постоянная времени контура скорости равна постоянной времени внутреннего контура тока: Коэффициент обратной связи по скорости:  , (14) , (14)где UЗС.МАКС = 1 о.е. – максимальное задание на скорость. Коэффициент усиления ПИ-регулятора скорости находим следующим образом:  . (15) . (15)Постоянную времени регулятора находим следующим образом: Интегральную составляющую ПИ-регулятора рассчитываем по формуле:  , (17) , (17)где dt = TS – шаг расчета системы управления по времени. Порядок выполнения работы и методические указания: 1. Получить от преподавателя задание на выполнение лабораторной работы, включающее № варианта параметров ДПТ. 2. Рассчитать параметры двигателя, коэффициенты ПИ-регулятора для контура тока и контура скорости (формулы для расчета представлены в разделе «Краткие теоретические сведения»). | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||