фв. Система автоматического управления мехатронным модулем
 Скачать 150.16 Kb. Скачать 150.16 Kb.
|

|
Кафедра “Автоматизация, робототехника и мехатроника” Реферат на тему: Система автоматического управления мехатронным модулем. По дисциплине: ”Управление мехатронными и робототехническими системами” Выполнил: Проверил: 2022 Введение Одним из перспективных направлений развития и совершенствования отраслей промышленности является внедрение и использование промышленных роботов на крупных и средних производствах. Промышленные роботы обладают большой функциональной гибкостью за счет прогрессивных исполнительных механизмов, эффективных приводов, микропроцессорных систем с развитым программным обеспечением, технического зрения и других средств очувствления, а также адаптивных возможностей и элементов искусственного интеллекта. Такие роботы позволяют заменить человека на производственных работах, связанных с тяжелыми, монотонными, опасными и вредными условиями труда. Важной особенностью промышленных роботов является возможность их использования для выполнения работ, которые не могут быть механизированы и автоматизированы традиционными средствами [1]. Поэтому для автоматизации процесса транспортировочных работ тяжелых листовых и хрупких материалов в цехах предлагается использовать промышленный двурукий робот. Использование такого робота позволит уменьшить время выполняемых работ по разгрузке и транспортировке, а также исключить повреждения переносимых материалов. Это определяется наличием у робота программы действий, обусловленной заложенными в компьютер алгоритмами систем управления, т.к. он представляет собой программируемый универсальный манипулятор, снабженный внешними датчиками оценки положения и других параметров рабочего органа. 1. Актуальность темы Современный промышленный робот–манипулятор применим для замены человеческого труда. Так, робот может использовать инструментальный захват для удержания инструмента и осуществления обработки заготовки, либо держать саму заготовку для подачи ее в рабочую зону для дальнейшей обработки. При применении робота производительность обычно повышается, так как робот может выполнять перемещение и позиционирование рабочего инструмента значительно быстрее человека, а также благодаря непрерывной работе робота 24 часа в сутки без перерывов и остановок, в отличии от человека. При правильном выборе роботизированной системы производительность возрастает в разы или даже на порядок, по сравнению с ручным производством. 2. Цель и задачи исследования, планируемые результаты Целью работы является разработка системы автоматического управления согласованным движением звеньев манипуляторов промышленного двурукого робота, предназначенного для загрузочно-разгрузочных работ тяжелых, хрупких и листовых материалов стекольного, стального, фанерного и других исполнений. Цель разработки – улучшение условий труда для рабочего персонала, повышение оперативности и исключение ошибок при манипулировании грузов различной тяжести на производстве. Задачами системы автоматического управления двуруким роботом являются: Достижение заданных показателей качества при реализации автоматической системы управления двуруким роботом. Реализация непрерывного цикла работы двурукого робота Обеспечение высокой точности позиционирования схватов робота за счет управления исполнительными механизмами. Управление приводами на сочленениях для обеспечения быстродействия и точности управления рабочими органами. Методы исследования: методы системного анализа, методы теории автоматического управления, методы выбора приводов звеньев робота, методы компьютерного моделирования в среде Matlab&Simulink. В рамках магистерской работы планируется получение актуальных научных результатов по следующим направлениям: проведен анализ систем автоматического управления положением звеньев робота. Реализация структурно–алгоритмической и программно–аппаратной части системы управления робота. Синтез системы управления в соответствии с заданными критериями. 3. Постановка задачи Объектом управления в данной работе является двурукий промышленный робот (ПР). Он представляет собой универсальное электромеханическое устройство, состоящее из двух манипуляторов – исполнительных механизмов. Базовыми элементами робота являются манипуляторы – механизмы, обладающие несколькими степенями подвижности и предназначены для перемещения и ориентации объектов в рабочем пространстве. Многозвенная конструкция манипулятора заканчивается схватом или сменным инструментом, которые предназначены для захвата объектов определенной формы и выполнения технологических операций соответственно. Манипуляторы ПР предназначены для выполнения двигательных функций при перемещении объектов в пространстве. Перемещение робота осуществляется по рельсам. Конструктивно данный ПР представляет собой разомкнутый контур, состоящий из 10 твердых тел (звеньев), последовательно соединенных сочленениями, которые приводят звенья во вращательное движение с помощью силовых приводов, установленных на каждом сочленении (рис. 1) [3]. 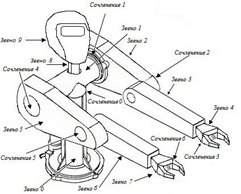 Рисунок 1 – Конструкция двурукого робота Звено 0 является основанием манипулятора, а звено 1 представляет собой плечевой сустав, который перпендикулярно присоединен к основанию. На нем крепятся руки робота – манипуляторы. Конец каждой «руки» снабжен рабочим инструментом – схватом, который предназначен для захвата и удержания объектов манипулирования. Относительное движение сочленений переходит звеньям, в результате этого схваты манипулятора занимают в пространстве необходимое положение для захвата объектов. Захватные устройства манипуляторов предназначены для захватывания плоских листовых материалов и имеют тип двухпозиционного центрирующего схвата. Данный тип схвата обеспечивает высокоточное положение в пространстве. Конструкция схватов предполагает поворот схватов на 90° за счет встроенных в схваты поворотных пневмодвигателей. Это позволяет выполнять захват как горизонтально, так и вертикально расположенных материалов. 4. Состав и принцип работы системы Двурукие роботы широкого назначения являются универсальными механизмами с большим спектром технологических возможностей, т.к. рассчитаны на транспортировку легкоразрушающихся материалов сложной конфигурации. Поэтому данный объект управления должен обеспечивать высокую точность позиционирования для обеспечения целостности грузов [4]. В целом, процесс управления движением звеньев манипуляторов двурукого ПР можно представить таким образом: Шаг 1. Задать координаты точек позиционирования, исходной и конечной. Шаг 2. Перенести захватное устройство в координаты захвата детали с поверхности. Шаг 3. Перейти в положение захвата детали. Шаг 4. Включить пневматическое захватное устройство и осуществить захват детали. Шаг 5. Перенести захватное устройство с деталью в требуемой местоположение. Шаг 6. Выключить захватное устройство. Шаг 7. Повторить с шага 2. Исходя из вышеизложенного алгоритма, лежащего в основе программы действий робота, определим структуру объекта со всеми вспомогательными устройствами, требуемыми для его работы. В состав ПР входят следующие основные части (рис.2): – манипулятор, или иначе механическая система робота; – информационная система; – система программного управления, или иначе устройство управления.  Рисунок 2 – Схема состава системы управления манипулятора робота В совокупности информационная система и система программного управления образуют устройство автоматического управления. Манипуляторы ПР содержат рабочий орган в виде захватного устройства и механизмы, необходимые для выполнения всех его двигательных функций: – передаточные механизмы; – исполнительные механизмы; – приводы; – несущие элементы. Исполнительный механизм ПР с приводом и захватным устройством называют рукой манипулятора. Для перемещения манипулятора относительно технологического оборудования используются устройства передвижения. В состав ИС входят чувствительные (сенсорные) устройства внешней среды, система внутренней диагностики и устройства контроля и блокировок. ИС обеспечивает сбор, первичную обработку и перевод в СПУ данных о функционировании механизмов робота и о состоянии внешней среды. Под перепрограммируемыми устройствами СПУ понимают такие, которые обеспечивают изменение последовательности и (или) значений перемещений по степеням подвижности и управляющих функций на пульте управления. Это изменение управляющей программы может быть выполнено автоматически или при помощи оператора. СПУ содержит: пульт управления, с помощью которого оператор осуществляет ввод и контроль задания; запоминающее устройство, в котором хранится вся необходимая информация, включая программы работ; вычислительное устройство, реализующее алгоритм управления манипулятором; блок управления приводами механизмов манипулятора [8]. Рабочая зона робота является основной составляющей цикла цифровой системы управления, т.к. данная система характеризуется тем, что важно только начальное и конечное положение точек рабочих органов манипуляторов робота. При организации циклового управления роботом могут быть использованы довольно простые автоматы, построенные на элементах цифровой вычислительной техники. Такие автоматы включают: память последовательности кодов требуемых состояний робота, память последовательности временных интервалов, т.е. тех интервалов времени, в которых управляющие векторы остаются неизменными, временное устройство и блок управления переходами. Функциональная схема технических средств системы автоматического управленияДвурукий промышленный робот имеет сложную структуру и для обеспечения его полной функциональности необходима комбинация из централизованной и децентрализованной систем управления. На рис. 3 показана функциональная схема взаимодействия этих систем управления. Централизованную систему здесь представляет пульт управление и САУ робота, а децентрализованную – САУ манипуляторов рук робота и их исполнительные механизмы. Пульт управления является центральным устройством, обеспечивающим управление робота с помощью заданной программы. Оператор загружает программу с ЭВМ через ОЗУ на контроллер, и в это же время может работать с другой программой или изменять эту в ПЗУ без прерывания рабочего цикла. На пульте оператора также фиксируется информация о состоянии манипуляторов и все параметры, снимаемые датчиками. Модуль аварийной блокировки работает по сигналам датчиков положения при недопустимых отклонениях от заданной программы и оповещает оператора и САУ робота о возникаемых авариях. САУ робота включает в себя блоки памяти, контроллер и сравнивающее устройство. Контроллер по заданной оператором программе формирует алгоритм работы каждого из манипуляторов и отправляет его на сравнивающее устройство. Сравнивающее устройство необходимо для определения отклонений координат рабочих органов манипуляторов робота[13]. САУ манипуляторов правой и левой рук состоит из контроллера, ЦАП и усилителя. На контроллер поступают управляющие сигналы координат рабочего органа, которые он обрабатывает в углы поворота приводов каждого звена соответственно. АЦП, в свою очередь, осуществляет преобразование аналогового сигнала, полученного с контроллера в цифровой код для управления приводами звеньев манипулятора. Усилитель необходим для усиления поступаемого с контроллера сигнала.  Рисунок 3 – Общая функциональная схема технических средств робота ВыводыВ работе приведена разработка системы автоматического управления движением звеньев манипуляторов двурукого робота, предназначенного для выполнения загрузочно-разгрузочных операций хрупких, тяжелых и листовых материалов фанерного, стекольного, стального и других исполнений. Приведение звеньев в движение осуществляется по жестко заданной цикловой программе. На первом этапе работы был проведен анализ объекта автоматизации, определены его характеристики и требования, по которым необходимо провести синтез следящей САУ. Работа включает в себя формирование общей идеи проектирования, которая заключается в том, что для обеспечения высокой точности и необходимой функциональности у правления роботом необходима комбинация централизованной и децентрализованной систем управления. Это связано с тем, что необходимо обеспечить именно согласованное движение манипуляторов. В магистерской диссертации приведена функциональная схема управления роботом, произведен выбор технических средств, по которым построена принципиальная электрическая схема управления роботом. |