лабораторная работа тех диагностика. Снятие естественных характеристик асинхронного двигателя
 Скачать 187.83 Kb. Скачать 187.83 Kb.
|

 ФЕДЕРАЛЬНОЕ АГЕНТСТВО ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА Федеральное государственное бюджетное образовательное учреждение высшего образования «Уральский государственный университет путей сообщения» (ФГБОУ ВО УрГУПС) Кафедра "Электрическая тяга" ОТЧЕТ по лабораторной работе № 3 по дисциплине: Основы электропривода технологических установок тема: «Снятие естественных характеристик асинхронного двигателя»   Выполнили: студенты группы ПСв-416 Загребин Н.О. Нигомарова К.А. Трошин И.Д. Проверил: доцент Федоров Е.В. Екатеринбург 2019 Снятие естественных характеристик асинхронного двигателя Цель работы: Исследование рабочих свойств и характеристик асинхронного двигателя. Программа работы: Изучить схему для экспериментального исследования асинхронного электродвигателя с короткозамкнутым ротором (в дальнейшем изложении АД), состав и назначение модулей, используемых в работе. Собрать схему для экспериментального исследования АД. Провести пробное включение. Снять естественные характеристики АД. Провести обработку экспериментальных данных, составить отчет и сделать выводы по работе. Паспортные данные асинхронного двигателя приведены в таблице 1. Таблица 1 - Паспортные данные АД.
Продолжение таблицы 1 - Паспортные данные АД.
Структурная схема для исследования асинхронного двигателя представлена на рисунке 1. 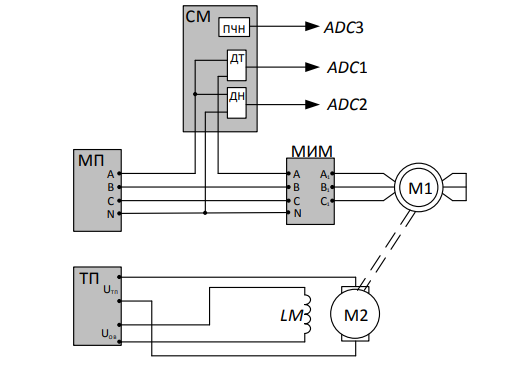 Рисунок 1 – Структурная схема для снятия характеристик асинхронного двигателя Принципиальная схема приведена на рисунке 2. 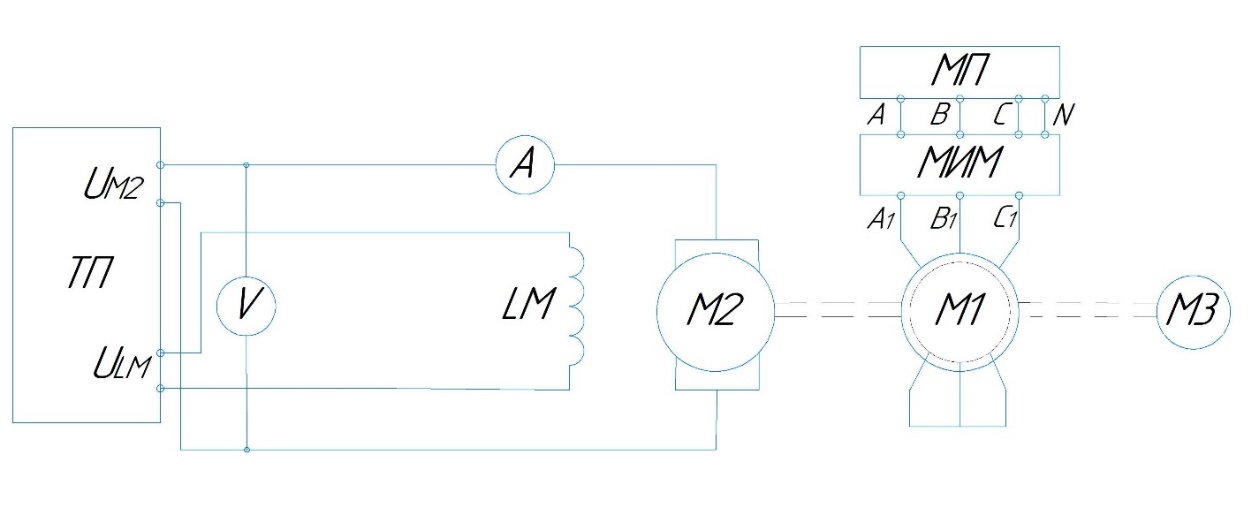 Рисунок 2 – Принципиальная схема ДПТ НВ Данные опыта приведены в таблице 2. Таблица 2 - Экспериментальные и расчётные данные
Пример расчета столбца для двигательного режима работы: Угловая частота вращения ротора определяется по формуле 1:   Относительное скольжение АД (2):  где   Полная мощность, потребляемая двигателем из сети (3):   cos(  ) электродвигателя определяется по формуле 4: ) электродвигателя определяется по формуле 4: где  -активная мощность, потребляемая из сети, Вт -активная мощность, потребляемая из сети, Вт Электрические потери в цепи статора электродвигателя (5):   где  -сопротивление статорной цепи (таблица 1),Ом -сопротивление статорной цепи (таблица 1),ОмПолезная мощность на валу электродвигателя определяется исходя из формулы 6:  где  -сумма механических, магнитных и добавочных потерь в асинхронном двигателе(считается равным -сумма механических, магнитных и добавочных потерь в асинхронном двигателе(считается равным  Момент на валу двигателя (7):  Коэффициент полезного действия в двигательном режиме (8):  Пример расчета столбца для генераторного режима работы. Угловая частота вращения ротора определяется по формуле 9:   Относительное скольжение АД (10):  где  Полная мощность, потребляемая двигателем из сети (11):   cos( ) электродвигателя определяется по формуле 12: где -активная мощность, потребляемая из сети, Вт Электрические потери в цепи статора электродвигателя (13):   где -сопротивление статорной цепи (таблица 1),ОмПолезная мощность на валу электродвигателя определяется исходя из формулы 14:  где -сумма механических, магнитных и добавочных потерь в асинхронном двигателе(считается равным Момент на валу двигателя (15):  Коэффициент полезного действия в генераторном режиме (16):  На основании паспортных данных произведем расчет оставшихся точек механической характеристики двигательного режима АД (включая точку соответствующую номинальному, критическому и пусковому моменту), используя формулу Клосса и построим зависимости М = f(S);ω = f(M).  Номинальный момент определим исходя из формулы 17: (  17) 17)Максимальный момент определяется по формуле 18:  (18) (18)Критическое скольжение (19):  (19) где  Расчетные значения оставшихся точек механической характеристики приведены в таблице 3 Таблица 3 – Расчетные данные оставшихся точек
Зависимости М = f(S);ω = f(M) приведены на рисунках 3,4. Отмечаем на графике участок с экспериментально снятыми точками, пунктирной линией соединяем снятую в ходе эксперимента механическую характеристику АД с расчетными точками.  Рисунок 3 – График зависимости М = f(S)  Рисунок 4 – График зависимости ω = f(M) Графики зависимостей ɳ = f(M) и cos(φ) =f(M) приведены на рисунках 5,6.  Рисунок 5 - Графики зависимости ɳ = f(M)  Рисунок 6 - График зависимости cos(φ) = f(M) Вывод: 1.В ходе данной лабораторной работы, мы снимали механические характеристики (М = f(S);ω = f(M)) и зависимости (ɳ = f(M); cos(φ) = f (M)). Асинхронный двигатель подключили на прямую к выходам модуля питания. В качестве нагрузочной машины у нас в работе, выступает двигатель постоянного тока. ДПТ подключили к модулю тиристорного преобразователя. Якорную обмотку подключили к входам якорного преобразователя. Напряжение и ток на якоре ДПТ контролируется с помощью индикатора на модуле ПТ. Включили лабораторный стенд, после чего запустили асинхронный двигатель, подали питание на модуль измерителя мощности, подали питание на ТП,тумблером подали разрешение на работу тиристорного преобразователя ,и переключателем выбрали направление вращения. Задали момент нагрузки с помощью потенциометра. Сняли три точки в двигательном режиме, две точки в генераторном режиме, и точку холостого хода. 2.Начало движения асинхронного двигателя проиходит в точке 1 с определенным пусковым моментом, далее происходит разгон до точки 2, которая имеет максимальный момент, после чего двигатель переходит на рабочую часть характеристики, в точке 3 двигатель работает в номинальном режиме, в точке 4 двигатель работает в режиме холостого хода, при котором частота вращения ротора отстает от частоты вращения поля статора(рисунок 7) 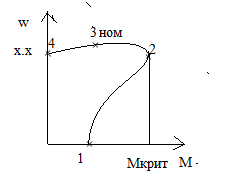 Рисунок 7 – Двигательный режим работы АД Механической характеристикой двигателя называется зависимость частоты вращения ротора от момента на валу ω = f(M):  Если учесть взаимосвязь  то получим зависимость М = f(S),при которой то получим зависимость М = f(S),при которой 3. Физический смысл идеального холостого хода заключается в том, что он получается, при условии равенства частот вращения поля статора (  = =  ), в связи с чем скольжение равно 0 : ), в связи с чем скольжение равно 0 : В реальной машине нет возможности снятия упомянутого выше равенства, т.к в асинхронном двигателе всегда присутствует тормозной момент (за счет сил трения), а в режиме идеального холостого хода магнитное поле перестанет пересекать обмотку ротора и в них не станет протекать электрический ток, следовательно, исчезнет вращающий момент, что противоречит условию работы асинхронного двигателя. Реальный холостой ход мы снимаем с асинхронного двигателя, когда он еще не подключен к тиристорному преобразователю, т.е когда нет нагрузки. 4. Если ротор разогнать с помощью внешнего момента (например, каким-либо двигателем) до частоты, большей частоты вращения магнитного поля, то изменится направление ЭДС в обмотке ротора и активной составляющей тока ротора, то есть асинхронная машина перейдёт в генераторный режим. При этом изменит направление и электромагнитный момент, который станет тормозным. В генераторном режиме работы скольжение  Режим холостого хода асинхронного двигателя возникает при отсутствии на валу нагрузки в виде редуктора и рабочего органа. В режиме реального холостого хода s=0,01-0,08. В режиме идеального холостого хода n2=n1, следовательно s=0, M=0. При   5. Потребление активной мощности происходит при существовании активной нагрузки, т.е активная мощность — это та мощность, при которой ток совершает эффективную работу. Реактивная мощность представляет собой часть полной мощности, которая не производит работы, но необходима для создания электромагнитных полей. 6. cos(φ) – это отношение активной мощности двигателя к полной. Он говорит о том какая часть потребляемой из сети электроэнергии затрачивается на полезную работу и преобразуется в механическую энергию. Остальная мощность идет на создание полей и работу не производит. График имеет жесткую характеристику и чем выше момент, тем выше значение косинуса. 7.Расчет жесткости рабочей части механической характеристики асинхронного двигателя рассчитываем по формуле  8. Преимущества асинхронных двигателей переменного тока: Легкость в изготовлении. Высокая надежность. Отсутствие коллектора. Недостатки асинхронных двигателей переменного тока: Относительная сложность в управлении. Необходим источник трехфазного переменного тока. Большой пусковой ток. 9.Примером применения АД в производственных механизмах служат: прокатные станы, металлорежущие станки, электрическая тяга на локомотивах | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||


 ,Ом
,Ом ,Ом
,Ом ,об/мин
,об/мин



 ,Вт
,Вт ,Вт
,Вт ,
,