Для осуществления поставленных целей разумные алгоритмы планирования должны опираться на какие–либо характеристики процессов в системе, заданий в очереди на загрузку, состояния самой вычислительной системы, иными словами, на параметры планирования. В этом разделе мы опишем ряд таких параметров, не претендуя на полноту изложения.
Все параметры планирования можно разбить на две большие группы: статические параметры и динамические параметры. Статические параметры не изменяются в ходе функционирования вычислительной системы, динамические же, напротив, подвержены постоянным изменениям.
К статическим параметрам вычислительной системы можно отнести предельные значения ее ресурсов (размер оперативной памяти, максимальное количество памяти на диске для осуществления свопинга, количество подключенных устройств ввода–вывода и т.п.). Динамические параметры системы описывают количество свободных ресурсов в текущий момент времени.
К статическим параметрам процессов относятся характеристики, как правило, присущие заданиям уже на этапе загрузки:
Каким пользователем запущен процесс или сформировано задание.
Насколько важной является поставленная задача, т.е. каков приоритет ее выполнения.
Сколько процессорного времени запрошено пользователем для решения задачи.
Каково соотношение процессорного времени и времени, необходимого для осуществления операций ввода–вывода.
Какие ресурсы вычислительной системы (оперативная память, устройства ввода–вывода, специальные библиотеки и системные программы и т.д.) и в каком количестве необходимы заданию.
Алгоритмы долгосрочного планирования используют в своей работе статические и динамические параметры вычислительной системы и статические параметры процессов (динамические параметры процессов на этапе загрузки заданий еще не известны). Алгоритмы краткосрочного и среднесрочного планирования дополнительно учитывают и динамические характеристики процессов. Для среднесрочного планирования в качестве таких характеристик может выступать следующая информация:
Сколько времени прошло со времени выгрузки процесса на диск или его загрузки в оперативную память.
Сколько оперативной памяти занимает процесс.
Сколько процессорного времени было уже предоставлено процессу.
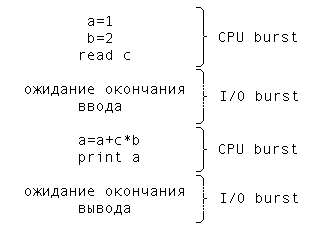
Рисунок 4 – Фрагмент деятельности процесса с выделением промежутков непрерывного использования процессора и ожидания ввода–вывода
Для краткосрочного планирования нам понадобится ввести еще два динамических параметра. Деятельность любого процесса можно представить как последовательность циклов использования процессора и ожидания завершения операций ввода–вывода. Промежуток времени непрерывного использования процессора носит на английском языке название CPU burst, а промежуток времени непрерывного ожидания ввода–вывода – I/O burst. На рисунке 4. показан фрагмент деятельности некоторого процесса на псевдоязыке программирования с выделением указанных промежутков. Для краткости изложения мы будем использовать термины CPU burst и I/O burst без перевода. Значения продолжительности последних и очередных CPU burst и I/O burst являются важными динамическими параметрами процесса.
1.3 Алгоритмы планирования
Существует достаточно большой набор разнообразных алгоритмов планирования, которые предназначены для достижения различных целей и эффективны для разных классов задач. Многие из них могут быть использованы на нескольких уровнях планирования. В этом разделе мы рассмотрим некоторые наиболее употребительные алгоритмы применительно к процессу кратковременного планирования.
First–Come, First–Served (FCFS)
Простейшим алгоритмом планирования является алгоритм, который принято обозначать аббревиатурой FCFS по первым буквам его английского названия – First Come, First Served (первым пришел, первым обслужен). Представим себе, что процессы, находящиеся в состоянии готовность, организованы в очередь. Когда процесс переходит в состояние готовность, он, а точнее ссылка на его PCB, помещается в конец этой очереди. Выбор нового процесса для исполнения осуществляется из начала очереди с удалением оттуда ссылки на его PCB. Очередь подобного типа имеет в программировании специальное наименование FIFO – сокращение от First In, First Out (первым вошел, первым вышел).
Такой алгоритм выбора процесса осуществляет невытесняющее планирование. Процесс, получивший в свое распоряжение процессор, занимает его до истечения своего текущего CPU burst. После этого для выполнения выбирается новый процесс из начала очереди.
Преимуществом алгоритма FCFS является легкость его реализации, в то же время он имеет и много недостатков. Рассмотрим следующий пример. Пусть в состоянии готовность находятся три процесса p0, p1 и p2, для которых известны времена их очередных CPU burst. Эти времена приведены в таблице 1 в некоторых условных единицах.
Таблица 1 – Параметры процессов
Процесс
|
p0
|
p1
|
p2
|
Продолжительность очередного CPU burst
|
13
|
4
|
1
|
Для простоты будем полагать, что вся деятельность процессов ограничивается использованием только одного промежутка CPU burst, что процессы не совершают операций ввода–вывода, и что время переключения контекста пренебрежимо мало.
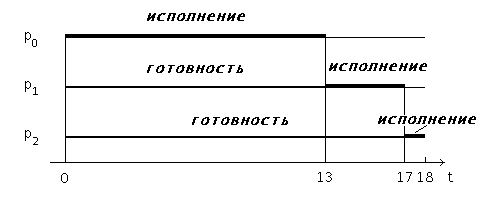
Рисунок 5 – Выполнение процессов при порядке p0,p1,p2
Если процессы расположены в очереди процессов готовых к исполнению в порядке p0, p1, p2, то картина их выполнения выглядит так, как показано на рисунке 5. Первым для выполнения выбирается процесс p0, который получает процессор на все время своего CPU burst, т.е. на 13 единиц времени. После его окончания в состояние исполнение переводится процесс p1, занимая процессор на 4 единицы времени. И, наконец, возможность работать получает процесс p2. Время ожидания для процесса p0 составляет 0 единиц времени, для процесса p1 – 13 единиц, для процесса p2 – 13 + 4 = 17 единиц. Таким образом, среднее время ожидания в этом случае – (0 + 13 + 17)/3 = 10 единиц времени. Полное время выполнения для процесса p0 составляет 13 единиц времени, для процесса p1 – 13 + 4 = 17 единиц, для процесса p2 – 13 + 4 + 1 = 18 единиц. Среднее полное время выполнения оказывается равным (13 + 17 + 18)/3 = 16 единицам времени.
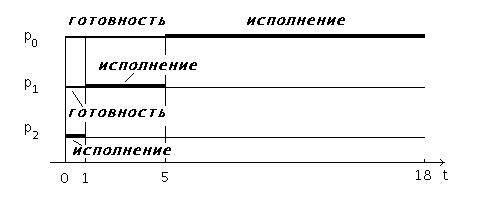
Рисунок 6 – Выполнение процессов при порядке p2,p1,p0
Если те же самые процессы расположены в порядке p2, p1, p0, то картина их выполнения будет соответствовать рисунку 6. Время ожидания для процесса p0 равняется 5 единицам времени, для процесса p1 – 1 единице, для процесса p2 – 0 единиц. Среднее время ожидания составит (5 + 1 + 0)/3 = 2 единицы времени. Это в 5 (!) раз меньше, чем в предыдущем случае. Полное время выполнения для процесса p0 получается равным 18 единицам времени, для процесса p1 – 5 единицам, для процесса p2 – 1 единице. Среднее полное время выполнения составляет (18 + 5 + 1)/3 = 6 единиц времени, что почти в 2,7 раза меньше чем при первой расстановке процессов.
Как видим, среднее время ожидания и среднее полное время выполнения для этого алгоритма существенно зависят от порядка расположения процессов в очереди. Если у нас есть процесс с длительным CPU burst, то короткие процессы, перешедшие в состояние готовность после длительного процесса, будут очень долго ждать начала своего выполнения. Поэтому алгоритм FCFS практически неприменим для систем разделения времени. Слишком большим получается среднее время отклика в интерактивных процессах.
Round Robin (RR)
Модификацией алгоритма FCFS является алгоритм, получивший название Round Robin (Round Robin – это вид детской карусели в США) или сокращенно RR. По сути дела это тот же самый алгоритм, только реализованный в режиме вытесняющего планирования. Можно представить себе все множество готовых процессов организованным циклически – процессы сидят на карусели. Карусель вращается так, что каждый процесс находится около процессора небольшой фиксированный квант времени, обычно 10 – 100 миллисекунд (рисунок 7). Пока процесс находится рядом с процессором, он получает процессор в свое распоряжение и может исполняться.
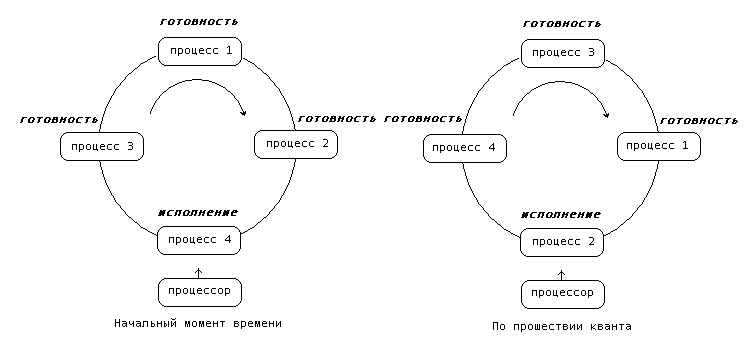
Рисунок 7 – Процессы на карусели
Реализуется такой алгоритм так же, как и предыдущий, с помощью организации процессов, находящихся в состоянии готовность, в очередь FIFO. Планировщик выбирает для очередного исполнения процесс, расположенный в начале очереди, и устанавливает таймер для генерации прерывания по истечении определенного кванта времени. При выполнении процесса возможны два варианта:
Время непрерывного использования процессора, требующееся процессу, (остаток текущего CPU burst) меньше или равно продолжительности кванта времени. Тогда процесс по своей воле освобождает процессор до истечения кванта времени, на исполнение выбирается новый процесс из начала очереди и таймер начинает отсчет кванта заново.
Продолжительность остатка текущего CPU burst процесса больше, чем квант времени. Тогда по истечении этого кванта процесс прерывается таймером и помещается в конец очереди процессов готовых к исполнению, а процессор выделяется для использования процессу, находящемуся в ее начале.
Рассмотрим предыдущий пример с порядком процессов p0, p1, p2 и величиной кванта времени равной 4. Выполнение этих процессов иллюстрируется таблицей 2. Обозначение “И” используется в ней для процесса, находящегося в состоянии исполнение, обозначение “Г” – для процессов в состоянии готовность, пустые ячейки соответствуют завершившимся процессам. Состояния процессов показаны на протяжении соответствующей единицы времени, т.е. колонка с номером 1 соответствует промежутку времени от 0 до 1.
Таблица 2 – Выполнения процессов
Время
|
1
|
2
|
3
|
4
|
5
|
6
|
7
|
8
|
9
|
10
|
11
|
12
|
13
|
14
|
15
|
16
|
17
|
18
|
p0
|
И
|
И
|
И
|
И
|
Г
|
Г
|
Г
|
Г
|
Г
|
И
|
И
|
И
|
И
|
И
|
И
|
И
|
И
|
И
|
p1
|
Г
|
Г
|
Г
|
Г
|
И
|
И
|
И
|
И
|
|
|
|
|
|
|
|
|
|
|
p2
|
Г
|
Г
|
Г
|
Г
|
Г
|
Г
|
Г
|
Г
|
И
|
|
|
|
|
|
|
|
|
|
Первым для исполнения выбирается процесс p0. Продолжительность его CPU burst больше, чем величина кванта времени, и поэтому процесс исполняется до истечения кванта, т.е. в течение 4 единиц времени. После этого он помещается в конец очереди готовых к исполнению процессов, которая принимает вид p1, p2, p0. Следующим начинает выполняться процесс p1. Время его исполнения совпадает с величиной выделенного кванта, поэтому процесс работает до своего завершения. Теперь очередь процессов в состоянии готовность состоит из двух процессов p2, p0. Процессор выделяется процессу p2. Он завершается до истечения отпущенного ему процессорного времени, и очередные кванты отмеряются процессу p0 – единственному, не закончившему к этому моменту свою работу. Время ожидания для процесса p0 (количество символов “Г” в соответствующей строке) составляет 5 единиц времени, для процесса p1 – 4 единицы времени, для процесса p2 – 8 единиц времени. Таким образом, среднее время ожидания для этого алгоритма получается равным (5 + 4 + 8)/3 = 5,6(6) единицы времени. Полное время выполнения для процесса p0 (количество непустых столбцов в соответствующей строке) составляет 18 единиц времени, для процесса p1 – 8 единиц, для процесса p2 – 9 единиц. Среднее полное время выполнения оказывается равным (18 + 8 + 9)/3 = 11,6(6) единицам времени.
Легко видеть, что среднее время ожидания и среднее полное время выполнения для обратного порядка процессов не отличаются от соответствующих времен для алгоритма FCFS и составляют 2 и 6 единиц времени соответственно.
На производительность алгоритма RR сильно влияет величина кванта времени. Рассмотрим тот же самый пример c порядком процессов p0, p1, p2 для величины кванта времени равной 1 (см. таблицу 3.). Время ожидания для процесса p0 составит 5 единиц времени, для процесса p1 – тоже 5 единиц, для процесса p2 – 2 единицы. В этом случае среднее время ожидания получается равным (5 + 5 + 2)/3 = 4 единицам времени. Среднее полное время исполнения составит (18 + 9 + 3)/3 = 10 единиц времени.
Таблица 3 – Последовательности временных отрезков
Время
|
1
|
2
|
3
|
4
|
5
|
6
|
7
|
8
|
9
|
10
|
11
|
12
|
13
|
14
|
15
|
16
|
17
|
18
|
p0
|
И
|
Г
|
Г
|
И
|
Г
|
И
|
Г
|
И
|
Г
|
И
|
И
|
И
|
И
|
И
|
И
|
И
|
И
|
И
|
p1
|
Г
|
И
|
Г
|
Г
|
И
|
Г
|
И
|
Г
|
И
|
|
|
|
|
|
|
|
|
|
p2
|
Г
|
Г
|
И
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При очень больших величинах кванта времени, когда каждый процесс успевает завершить свой CPU burst до возникновения прерывания по времени, алгоритм RR вырождается в алгоритм FCFS. При очень малых величинах создается иллюзия того, что каждый из n процессов работает на своем собственном виртуальном процессоре с производительностью
1/n от производительности реального процессора. Правда, это справедливо лишь при теоретическом анализе при условии пренебрежения временами переключения контекста процессов. В реальных условиях при слишком малой величине кванта времени и, соответственно, слишком частом переключении контекста, накладные расходы на переключение резко снижают производительность системы
Если те же самые процессы расположены в порядке p2, p1, p0, то картина их выполнения будет соответствовать рисунку 8.
Рисунок 8 – Выполнение процессов при порядке p2,p1,p0
Время ожидания для процесса p0 равняется 5 единицам времени, для процесса p1 – 1 единице, для процесса p2 – 0 единиц. Среднее время ожидания составит (5 + 1 + 0)/3 = 2 единицы времени. Это в 5 (!) раз меньше, чем в предыдущем случае. Полное время выполнения для процесса p0 получается равным 18 единицам времени, для процесса p1 – 5 единицам, для процесса p2 – 1 единице. Среднее полное время выполнения составляет (18 + 5 + 1)/3 = 6 единиц времени, что почти в 2,7 раза меньше чем при первой расстановке процессов.
Как видим, среднее время ожидания и среднее полное время выполнения для этого алгоритма существенно зависят от порядка расположения процессов в очереди. Если у нас есть процесс с длительным CPU burst, то короткие процессы, перешедшие в состояние готовность после длительного процесса, будут очень долго ждать начала своего выполнения. Поэтому алгоритм FCFS практически неприменим для систем разделения времени. Слишком большим получается среднее время отклика в интерактивных процессах.
|
 Скачать 1.18 Mb.
Скачать 1.18 Mb.