Создание модели автомотрисы
 Скачать 0.64 Mb. Скачать 0.64 Mb.
|

 ФЕДЕРАЛЬНОЕ АГЕНТСТВО ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА Федеральное государственное бюджетное образовательное учреждение высшего образования “Уральский государственный университет путей сообщения" (ФГБОУ ВО УрГУПС) Кафедра «Вагоны» Отчет ОБ ЛАБОРАТОРНОЙ РАБОТЕ №4-5 По дисциплине: «Система автоматизированного производства вагонов» Тема: «Создание модели автомотрисы» вариант 6 Преподаватель: Студент группы: доцент к.т.н. ПСгв-320 Митраков А.С. Домрачев П.А. Екатеринбург 2022 СодержаниеЗАДАНИЕ 4 1.1Создание модели колёсной пары 5 1.2Моделирование динамики отдельной колёсной пары 5 1.Создание автомотрисы АС4: 5 2.1Создание нового объекта – рельсового экипажа. 7 2.2Добавление колёсных пар. 7 2.3Создание графических образов. 8 2.4Добавление букс к модели автомотрисы 8 2.5Добавление кузова к модели автомотрисы 8 2.6Добавление силовых элементов 9 2.7Проектирование движения созданной автомотрисы АС4 11 2.Результат моделирования. 11 Вывод 12 ЗАДАНИЕСоздание модели колёсной пары. Моделирование движения колёсной пары по идеально ровному пути. Создание модели автомотрисы согласно выданному вариантом. В соответствии с индивидуальным вариантом: Длина базы, 6,2 м; Масса экипажной части, 38,3 т; Положение центра массы, 1,525. Моделирование движения отдельной колёсной пары. Создание модели колёсной пары Добавление колёсной пары согласно: Добавление параметра v0  Рисунок 1 Колёсная пара Моделирование динамики отдельной колёсной пары Подготовка среды моделирования динамики рельсового экипажа: Задали профили колёс и рельсов Движение по идеально ровному пути: Задали прямой путь Скорректировали настройки численного метода интегрирования уравнений движения. Сместили колёсную пару от положения равновесия на 1 мм и проанализировали её движение. Создание автомотрисы АС4: Описание модели Расчётная схема: 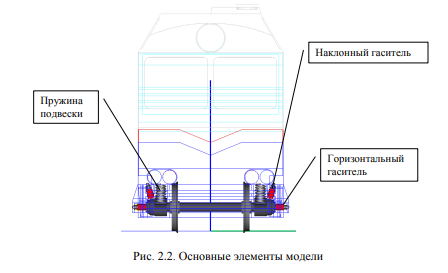 Рисунок 2 Основные элементы модели 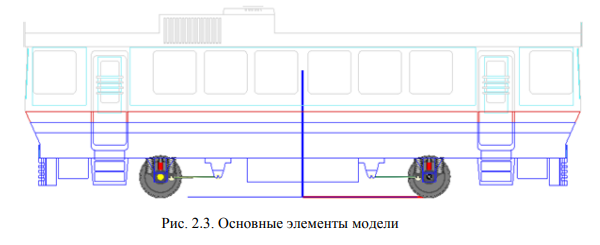 Рисунок 3 Основные элементы модели Модель включает следующие элементы: 1. две подсистемы «колёсная пара»; 2. четыре графических объекта (кузов, гаситель, пружина, поводок); 3. пять тел (кузов и четыре буксы); 4. шарнир, вводящий координаты кузова и четыре вращательных шарнира для описания кинематических пар букса/колёсная пара; 5. двенадцать биполярных силовых элементов (4 наклонных, 4 поперечных гасителя, 4 тяговых поводка); 6. восемь специальных силовых элементов типа Пружина для моделирования пружин подвески. Создание нового объекта – рельсового экипажа. Запуск программы UM Input и создание нового объекта. Добавление колёсных пар. Создание подсистемы с именем «Колёсная пара»; Задание инерционных параметров колесной пары; Масса – mwset = 3650 кг 2; Момент инерции для осей X и Y ixwset = 1000 кг·м 2; iywset = 500 кг·м 2; Добавление второй колёсной пары. Положение колёсной пары, описывалось идентификаторами, по оси x‑ l1 и l2 по оси z‑rwheel. Значение идентификаторов в соответчики с вариантом l1=l2=3.7 rwheel= 0.525 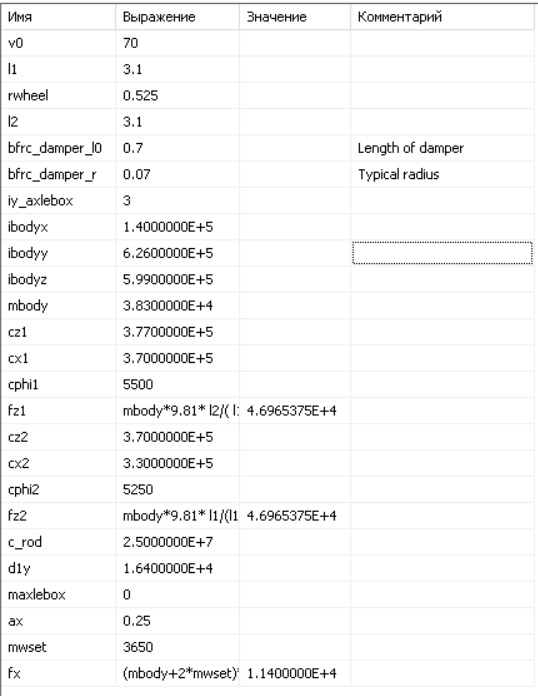 Рисунок 4 Список заданных идентификаторов Создание графических образов. Создание графического образа пружины; Добавление заранее подготовленных графических образов: AC4_CarBody (кузов); AC4_TractionRod_F (передний тяговый поводок); AC4_TractionRod_R (задний тяговый поводок); AC4_AxleBox LF (левая букса первой КП); AC4_AxleBox LR (левая букса второй КП); Damper (гаситель); Графические образы правых букс; Графические образы левых букс путём поворота на 180 градусов вокруг вертикальной оси создать графические образы правых букс. Добавление букс к модели автомотрисы Сначала создаётся тело – букса, а потом вращательный шарнир связывающий базу колёсной пары и буксу. Момент инерции буксы относительно оси вращения IY_AxleBox = 3 кг•м2 Добавление кузова к модели автомотрисы Добавляем кузов автомотрисы как твёрдым телом и описываем его инерционные параметры. mbody = 38300 кг; ibodyx = 140000 кг∙м2; ibodyy = 626000 кг∙м2; ibodyz = 599000 кг∙м2; zbody = 1.525 м. Зададим шарнир, выбрав тип 6 степеней свободы. Шарниру автоматически назначено имя jCar body. Данный шарнир назначает телу шесть степеней свободы: три декартовы координаты относительно СК0 и три угла ориентации в последовательности 1, 2, 3 (последовательные повороты вокруг оси X, затем Y и, наконец, Z). Добавление силовых элементов Создание пружин в количестве 4-х штук специальными силами с заданными параметрами элемента типа пружина: cz1 = 377000 Н/м; cx1 = 370000 Н/м; cphi1 = 5500 Нм/рад; fz1=mbody*9.81*l2/ (l1+ l2)/4. Создание продольных тяговых поводков в количестве 4-х штук с помощью биполярных силовых элементов. 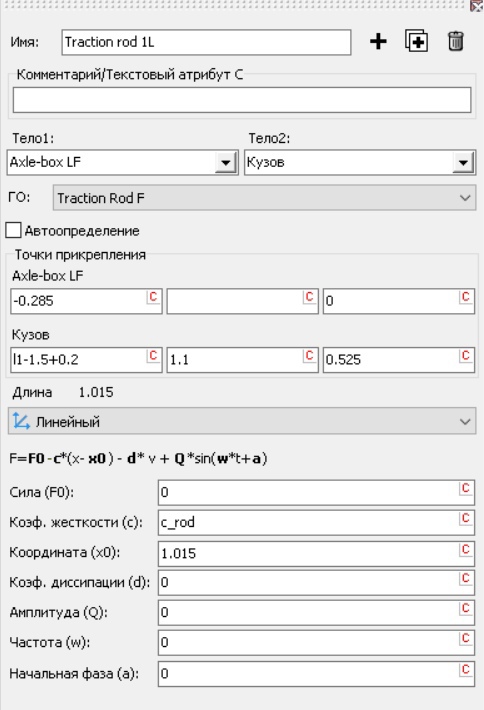 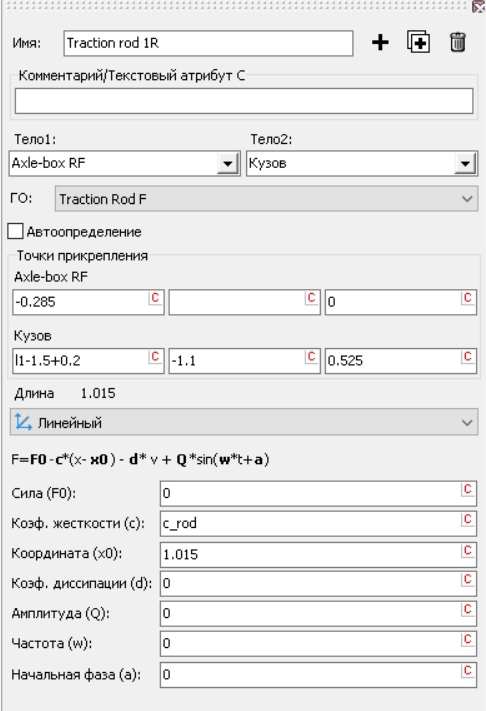 Рисунок 5 Параметры тяговых поводков 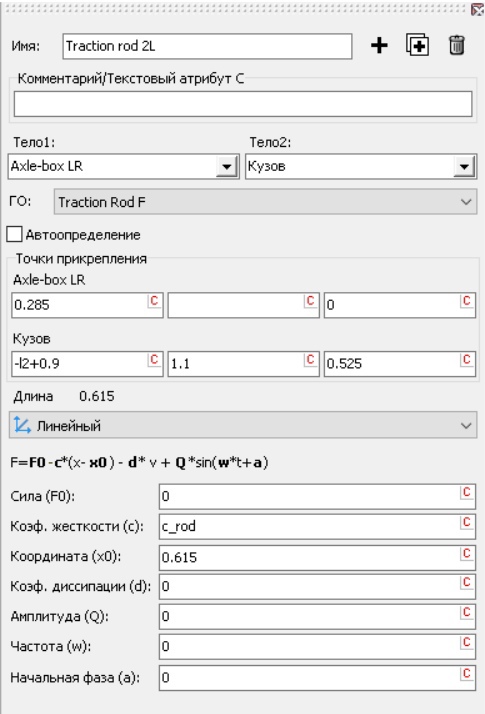 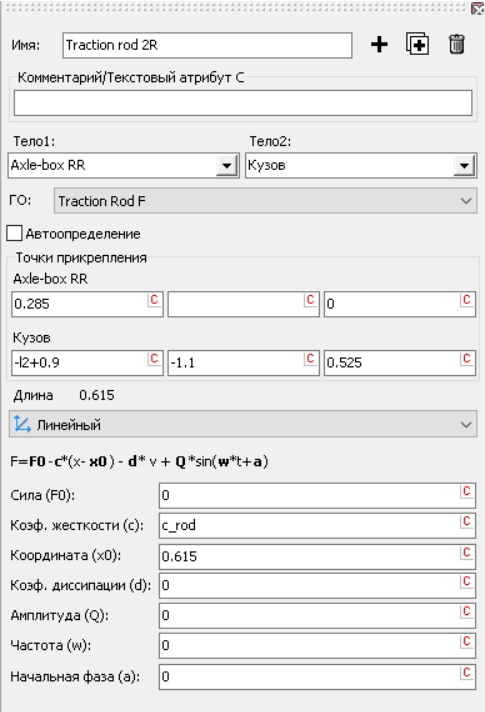 Рисунок 6 Координаты тяговых поводков Создание гасителей колебаний, добавлением биполярных элементов, переименовав их в DamperY1L; DamperY1R; DamperY2L; DamperY2R. Связывающие буксы и кузов автомотрисы. Первый гаситель DamperY1L, в качестве первое тело Axle-box LF, координаты точек прикрепления (0, 0.32, 0) и (l1, 1.7, 0.525) Второй гаситель DamperY1R, в качестве первое тело Axle-box RF, координаты точек прикрепления (0, -0.32, 0) и (l1, -1.7, 0.525) Третий гаситель DamperY2L, в качестве первое тело Axle-box LR, координаты точек прикрепления (0, 0.32, 0) и (-l2, 1.7, 0.525) Четвёртый гаситель DamperY2R, в качестве первое тело Axle-box RR, координаты точек прикрепления (0, -0.32, 0) и (-l2, -1.7, 0.525). 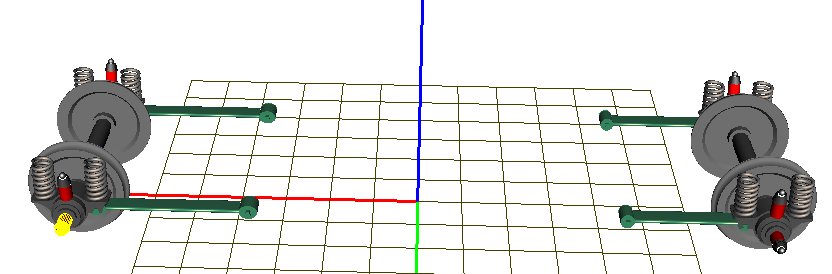 Рисунок 7 Расположение гасителей колебаний Проектирование движения созданной автомотрисы АС4 Проверка положения равновесия и движения созданной автомотрисы со скоростью 70 м/с по кривой траектории. 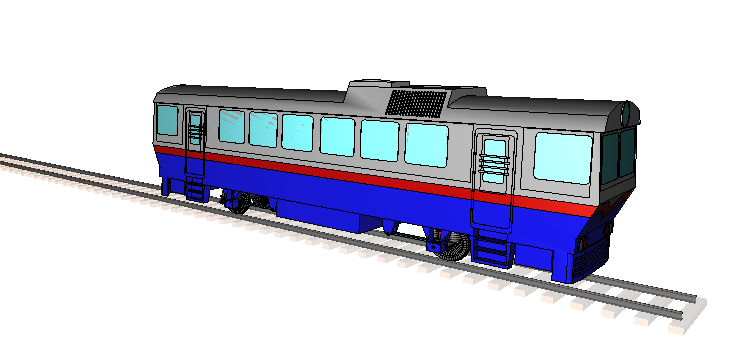 Рисунок 8 Движение автомотрисы Результат моделирования. По результатам процесса интегрирования ошибок не выявлено, сход с рельс не обнаружен, модель автомотрисы готова. ВыводСоздана модель колёсной пары и промоделировал её по идеально ровному пути. Созданная модель автомотрисы АС4 и успешно промоделирована по кривой траектории со скоростью равной 70 м/с. Разработанная модель может использоваться для оценки собственных частот колебаний кузова на рессорном подвешивании и поиска критической скорости. |