ФЕДЕРАЛЬНОЕ АГЕНСТВО СВЯЗИ
ордена Трудового Красного Знамени федеральное
государственное бюджетное образовательное учреждение
высшего образования
«Московский Технический Университет Связи и
Информатики» (МТУСИ)
Кафедра РТС
Реферат
По дисциплине Введение в профессию
На тему: «Спутниковая система навигации GPS»
Проверил:
Преподаватель А. А. Фролов
Москва 2019 г.
СОДЕРЖАНИЕ:
Введение.
История.
Основная информация.
Хронология событий развития GPS.
Описание системы и принципов её работы.
Основные характеристики GPS.
Характеристики навигационных систем GPS.
Спутниковые приёмники GPS.
Классификация спутниковых приёмников.
АнтиGPS?
Общие сведения и принцип действия GPS.
Что такое НКА?
Принцип действия GPS.
Идеальная конфигурация для GPS.
Дифференциальный режим СНС.
Структурные схемы сети.
Схема орбитальной группировки НКА системы NAVSTAR-GPS.
Схема формирования сигналов НКА.
Схема формирования СА кода.
Структурная и функциональные схемы приёмника.
Вывод.
Глава 1. ВВЕДЕНИЕ.
Спутниковая система навигации (GPS), обеспечивающая измерение расстояния, времени и определяющая местоположение объектов. Хоть изначально, проект GPS предназначался для военных целей, в современные дни им активно пользуются в гражданских целях. GPS-приёмники продают во многих магазинах, торгующих электроникой, их встраивают в мобильные телефоны, смартфоны, наручные электронные и смарт часы, КПК и онбордеры. Потребителям так же предлагаются и специальные программные продукты, позволяющие видеть своё местонахождение на электронной карте, имеющие возможность прокладывать маршруты с учётом дорожных знаков и ситуаций (таких как дорожные пробки, дорожные работы, перекрытие дорог etc.). Так же данные продукты помогают искать на карте конкретные дома и улицы, достопримечательности, кафе, больницы, автозаправки и прочие объекты инфраструктуры.
GPS применяется в:
Геодезии: с помощью GPS определяются точные координаты точек и границы земельных участков;
Картографии: GPS используется в гражданской и военной картографии;
Навигации: с применением GPS осуществляется как морская, так и дорожная навигация;
Спутниковом мониторинге транспорта: с помощью GPS ведётся мониторинг за положением, скоростью автомобилей, контроль за их движением;
Сотовой связи: первые мобильные телефоны с GPS появились в 90-х годах. В некоторых странах, например США, GPS используется для оперативного определения местонахождения человека, звонящего по телефону экстренной помощи 911. В России в 2010 году начата реализация аналогичного проекта ЭРА-ГЛОНАСС
Тектонике плит: с помощью GPS ведутся наблюдения движений и колебаний плит.
Геотегинге: информация, например фотографии, «привязываются» к координатам, благодаря встроенным или внешним GPS-приёмникам.
Глава 2. ИСТОРИЯ GPS.
Общие сведения.
В 50-е годы прошлого века возникла идея создания спутниковой системы. Это были времена, когда СССР запустил свой первый искусственный спутник в космос. В это время в США американские учёные под кураторством Ричарда Кершнера наблюдали за сигналом данного спутника и обнаружили интересное явление: при приближении спутника к Земле увеличивается частота принимаемого сигнала, а при отдалении наоборот уменьшается - благодаря эффекту Доплера. Смысл открытия состоит в том, что, зная свои координаты на планете, можно легко определить скорость и положение спутника и наоборот - если знать положение спутника, то можно вычислить свои координаты и скорость движения. После этого и возникла задача по созданию прототипа навигатора.
Данная идея была реализована лишь спустя 20 лет. Программа DNSS была разработана в 1973 году, немного позже она была переименована в Navstar-GPS, а после получила привычное для нас название GPS. В середине лета 1974 года был выведен на орбиту самый первый тестовый спутник. Последний, 24-й спутник, который закрывал покрытие земной поверхности, запустили на орбиту в 1993 году. Именно тогда система GPS и была взята на вооружение. В это же время появляется возможность использование GPS для того, чтоб запускать ракеты непосредственно на неподвижные объекты, позже начали наводить ракеты и на подвижные объекты не только на земле, но и в воздухе.
Как и говорилось ранее, вначале глобальная система позиционирования GPS разрабатывалась для применения в чисто военных целях. Так, в войне против Югославии и Ирака 95% высокоточных боеприпасов применялись с использованием системы GPS. Но после инцидента, когда в 1983 году самолёт Корейских Авиалиний, на борту которого находились пассажиры, при вторжении в советское воздушное пространство был сбит, Тогдашний президент Америки Рональд Рейган позволил частично применять системы навигации также и в гражданских целях. Но при этом американские учёные при помощи специального алгоритма точность, чтобы не допустить использования данной системы в военных целях.
После этого появилась информация о том, что некоторыми компаниями всё же был расшифрован алгоритм, который уменьшал точность на частоте L1. Поэтому в 2000 году указом президента США было отменено уменьшение точности навигационной системы.
GPS относится к второму поколению СНС (Спутниковых Навигационных Систем).
Хронология событий развития GPS.
Разрешение о производстве спутниковой системы навигации (1937 г.);
Испытание системы (1974-1979 гг.);
Приём сигнала от станции (1977 г.);
Запуск первой группы спутников из 11 штук (1978-1985 гг.);
Решение о запуске 18 спутников ввиду сокращения финансирования системы (1979 г.);
Возложение на спутники GPS-функции отслеживания ядерных взрывов (1980 г.);
Последующее сокращение финансирования системы (1980-1982 гг.);
Власти США предоставляют сигнал гражданским службам (1983 г.);
Гибель космического челна Space Shuttle «Challenger» притормозила совершенствование программы, поскольку челнок должен был выйти на орбиту в составе второй группы спутников. (1986 г.);
Принято решение о выпуске на орбиту 24 спутников, поскольку 18 спутников были не способны обеспечить бесперебойную работу системы (1988 г.);
Спутники второй группы активированы (1989 г.);
Произошло временное отключение SA, из-за войны в Персидском заливе, а так же нехватки военных приёмников (1990-1991 гг.) (Selective Availability (селективный доступ) - определение местоположения вплоть до 100 метров, создаваемая искусственным путём, благодаря искажению данных со спутника таких, как показания часов или значения эфермид);
Передано сообщение о первичной готовности программы. Окончательно принято решение о предоставлении сигнала частным лицам и гражданским службам для бесплатного пользования (1993 г.);
Укомплектование спутниковой группировки (1994 г.);
Система приведена в полную готовность (Full Operation Capability) (середина 1995 г.);
Для гражданских пользователей отключили SA, благодаря чему возросла точность определения со 100 до 200 метров. (2000 г.);
Подписано совместное заявление по обеспечению совместимости и взаимодополняемости GPS 1 и Galileo (2004 г.);
Произошёл запуск спутника GPS-IIR-14 с ракетой на борту Delta 7925 (2005 г.);
Начались Российско-американские переговоры относительно сотрудничества по обеспечению взаимного дополнения навигационных космических систем GPS и ГЛОНАСС (2006 г.);
Глава 3. ОПИСАНИЕ СИСТЕМЫ И ПРИЦНИПОВ ЕЁ РАБОТЫ.
3.1. Основные Характеристики GPS.
В систему GPS входит 24 искусственных спутника Земли, сеть наземных станций слежения и навигационные приёмники. Станции наблюдения требуются для определения и контроля параметров орбит, вычисления баллистических характеристик, регулировка отклонения от траекторий движения, контроль аппаратуры на борту космических аппаратов.
3.1.1. Характеристики навигационных систем GPS.
Количество спутников: на данный момент на орбите находятся 24 спутника основных и несколько запасных, на случай форс-мажора.
Количество орбитальных плоскостей: спутники вращаются по 6 орбитам, образуя взаимосвязанную сеть.
Высота орбиты: 20.000 км.
Срок эксплуатации спутников - 7,5 лет. Каждое десятилетие на орбиту выходят новые, модернизированные космические аппараты, потому что ничто не должно нарушить режим работы GPS.
Рабочие частоты: L1 = 1575,42 МГц; L2 = 1227,6 МГц, мощностью 50 Вт и 8 Вт соответственно.
Надежность навигационного определения - 95%.
3.2. Спутниковые приёмники GPS.
Спутниковый-приёмник (также GNSS-приёмник) - радиоприёмное устройство для определения графических координат текущего местоположения антенны приёмника, на основе данных о временных задержках прихода радиосигналов, излучаемых спутниками группы NAVSTAR. Максимальная точность измерения 3-5 м, а при наличии корректирующего сигнала от наземной станции - до 1 мм (обычно 5-10 мм) на 1 км расстояния между станциями. Точность коммерческих GPS-навигаторов составляет от 150 метров (у старых моделей при плохой видимости спутников) до 3 метров (у новых моделей на открытом месте). Кроме того, с использованием систем SBAS (спутниковой системы навигации) и местных систем передачи поправок точность может быть повышена до 1-2 метров по горизонтали.
3.2.1. Классификация спутниковых приёмников.
Спутниковые приёмники (т.н. GNSS-приёмник) можно разделить на профессиональные, обладающие высокой точностью определения местоположения, использующиеся в военных целях и бытовые, использующиеся в повседневной жизни.
Профессиональные GNSS-приёмники классифицируются как приёмники геодезического класса и приёмники ГИС-класса:
Геодезические приёмники - устройства, используемые для геодезических работ.
Приёмники ГИС-класса - представляют собой промышленный вариант КПК, в который встроено приёмо-передающее устройство и антенна, с предустановленным специализированным ПО.
Спутниковые приёмники для широкого круга пользователей можно классифицировать следующим образом:
Портативные устройства - автомобильные (отдельное портативное устройство или встроенное в транспортное средство в качестве бортового компьютера (онбордера), туристические, спортивные.
Встроенные, как функциональный узел в другие устройства - в КПК, ноутбук или мобильный телефон.
GNSS-трекеры, GNSS-логгеры, которые ведут запись и передачу координат на серверный центр и используются для спутников мониторинга автомобилей, людей, других объектов.
3.3. Анти GPS.
Когда было сказано о применениях системы GPS в военных целях, возникает вопрос: есть ли АнтиGPS? Да, есть и их нетрудно создать, как и другие средства радиопротиводействия. В России ещё на авиасалоне МАКС в 1997 г. был представлен портативный передатчик помех для подавления сигналов GPS. Создаваемые передатчиком помехи поступают на вход приёмников вместе с сигналами от спутников и вносят сбой в процесс измерения координат. В результате приемники прекращают определять текущее местоположение объектов, на которых они установлены, и выдают потребителю последние его координаты перед началом действия помех. У первого передатчика при массе менее 3 кг мощность излучения составляла около 2…3 Вт, что обеспечивало дальность действия 50 км по прямой видимости. У второго передатчика при массе 10 кг и мощности 20 Вт дальность действия составила 150 км.
Общие сведения и принцип действия GPS.
В GPS второго поколения применяются навигационные космические аппараты на круговых центрических орбитах с высотой 20.000 км над поверхностью Земли. Благодаря использованию высокостабильных эталонов времени и частоты в системе обеспечивается достаточно точная синхронизация навигационных радиосигналов, излучаемых орбитальной группировкой НКА (Навигационных Космических Аппаратов).
Основное назначение GPS второго поколения - глобальная оперативная навигация приземных подвижных объектов: наземных (сухопутных, морских, воздушных) и низкоорбитальных космических аппаратов. Это означает, что любой объект, оснащенный GNSS-приёмником, может в любом месте приземного пространства и в любой момент времени определить параметры своего движения - три координаты и три составляющие вектора скорости.
GPS второго поколения включает в себя три сегмента: орбитальную группировку НКА; наземный комплекс управления; приёмную аппаратуру пользователей (приёмоиндикаторы).
Что такое НКА?
Основные функции НКА заключаются в формировании и излучении навигационных радиосигналов. Для этого в состав их аппаратуры входят: радиотехническое оборудование (передатчики навигационных сигналов и телеметрической информации, приёмники данных и команд от наземного комплекса, антенны, блоки ориентации), ЭВМ, бортовой эталон времени и частоты, солнечные батареи и др. Несколько НКА, расположенных на определенных орбитах, могут формировать сплошное, с точки зрения наземного и надземного потребителя, радионавигационное поле, позволяющее проводить навигационные измерения с высокой точностью.
Наземный комплекс обеспечивает наблюдение и контроль за траекторией движения НКА, качеством функционирования их аппаратуры, управление режимами её работы и параметрами спутниковых радиосигналов, составом, объемом и дискретностью передаваемой со спутников навигационной информации.
Периодически, при полёте НКА в зоне видимости станции управления, происходит закладка в память бортовой ЭВМ спутника специальной информации, которая затем передаётся потребителям в навигационном сообщении в виде кадров соответствующего формата.
Принципы действия GPS.
На первом этапе аппаратура наземных комплексов измеряет координаты спутников в процессе их пролёта в зоне видимости и вычисляет параметры их орбит. Затем эти данные прогнозируются на фиксированные моменты времени, например, на середину каждого часового интервала предстоящих суток до выработки следующего прогноза. Спрогнозированные таким образом координаты и их производные (эфемериды) передаются на спутники, чтобы затем в виде навигационного сообщения, соответствующего указанным моментам времени, последовательно передаваться потребителям.
На втором этапе в приёмнике потребителя по этим данным осуществляется вторичное прогнозирование координат НКА, которое заключается в вычислении текущих координат НКА в интервалах между опорными точками траектории. Процедуры первичного и вторичного прогнозирования координат осуществляется с учётом известных закономерностей НКА.
В отличие от самоопределяющихся НКА рассмотренный вариант функционирования GPS обеспечивает упрощение аппаратуры спутников за счёт осложнения наземного оборудования.
GNSS-приёмники предназначены для приёма и обработки навигационных сигналов спутников с целью определения местоположения объекта путём измерения расстояния до спутников с известными координатами. Например, если известно, что объект находится на расстоянии 11000 км от спутника А, то это значит, что он находится где-то на поверхности сферы радиусом 11000 км с центром, совпадающим со спутником А. Если при этом расстояние до второго спутника В составляет 12000 км, то это значит, что объект находится на линии пересечения двух сфер радиусами 11000 км и 12000 км. Таким образом, задача определения местоположения объекта сводится к определению расстояний до двух спутников, если часы на спутнике и часы в приёмнике имеют одинаковую точность хода.
Если же измерения провести с помощью трёх спутников, то при одинаковой точности хода часов спутника и приёмника круг, описанный радиус-вектором третьего спутника, будет пересекаться с двумя другими в одной точке. Предположим, что объект находится в 4 с от спутника А, в 6 с от спутника В и в 8 с от спутника С, тогда круги сходятся в одной точке и следовательно можно определить точное расстояние (Рис. 1, А). Однако, если часы в приёмнике спешат на 1 с, то круги от каждого спутника уже не пересекаются в одной точке (Рис. 1, Б). В этом случае компьютер приёмника начинает вычитать (или добавлять) время методом последовательных итераций до тех пор, пока не сведёт все измерения к одной точке (для двух окружностей такое невозможно). После этого вычисляется поправка и делается соответствующее уравнивание по методу наименьших квадратов.
При определении расстояний до спутников основным источником погрешностей являются:
Задержка радиосигнала при прохождении через ионосферу Земли – слой заряженных частиц на высоте 120…290 км. Наиболее действенным способом учета таких задержек является использование двух сигналов, имеющих разные частоты несущих колебаний: при определенных соотношениях частот этих несущих удаётся существенно уменьшит влияние ионосферы на точность определения координат.
Сбой атомных часов на спутниках (устраняется станциями слежения).
Явление многолучевости (многократное переотражение сигналов от окружающих предметов и поверхностей). Характерно для пригоризонтных спутников.
Преднамеренное ухудшение точности, путём установки на НКА режима SA.
Так называемый GDOP (Geometric Dilution of Precision) – геометрический фактор снижения точности, определяемый взаимным расположением спутников, используемых приёмником при позиционировании. На практике вместе GDOP чаще используют PDOP (Position Dilution of Precision) – фактор снижения точности определения местоположения.
А ) )
Б)
Рис.1. Определение координат с помощью СНС. (а – одинаковая точность хода часов; б – разная точность хода часов)
Идеальная конфигурация для GPS.
Идеальной является конфигурация из четырёх спутников, три из которых расположены невысоко над горизонтом симметрично относительно четвёртого спутника, находящегося в зените. (Рис. 2). В этом случае получаются наиболее качественные результаты измерений, т. к. любые ошибки определения горизонтальных координат, полученные из одного направления, контролируются измерениями с противоположной стороны, а спутник, расположенный в зените даёт поправку по высоте для трёх остальных.
Плохая геометрия будет в том случае, когда все спутники расположены в одной и той же части неба (Рис.2, пример 2) или выстроились в прямую линию (Рис.2, пример 4). Определённая геометрия может быть неудачна для отдельного DOP параметра и выигрышна для других видов DOP. Например, если нужна прежде всего точность определения только для горизонтальных координат, то можно использовать геометрию, показанную в примере 3: не смотря на большое значение PDOP, точность определения горизонтальных координат будет достаточно высокой.
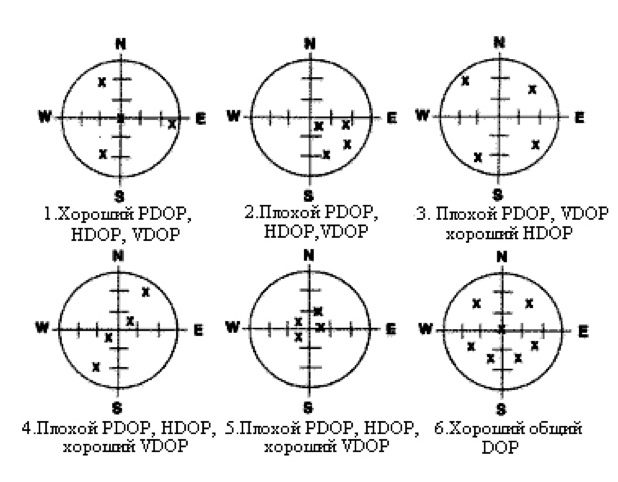
Рис. 2. Планисферы.
Дифференциальный режим СНС.
Точность определения координат, которую обеспечивает системы GPS, в лучшем случае составляет около 10 м. Однако, для многих приложений, таких как навигация автомобилей, навигация судов на узких фарватерах, геодезия, навигация летательных аппаратов, такая точность недостаточна. Для её увеличения был разработан метод дифференциальной навигации DGPS (Differential GPS), который обеспечивает (в специальных случаях) точность до нескольких десятков сантиметров.
Дифференциальный режим реализуется с помощью контрольного навигационного приёмника 5 (Рис. 3), устанавливаемого в точке с точно известными географическими координатами и называемого базовой станцией. Сравнивая известные координаты, полученные в результате прецизионной геодезической съемки, с измеренными с помощью спутников 1-4, базовый приёмник формирует поправки, которые передаются потребителю 6 по каналу связи 7. С учётом принятых поправок приёмник обычного потребителя позволяет определить его координаты с точностью до одного метра и менее.
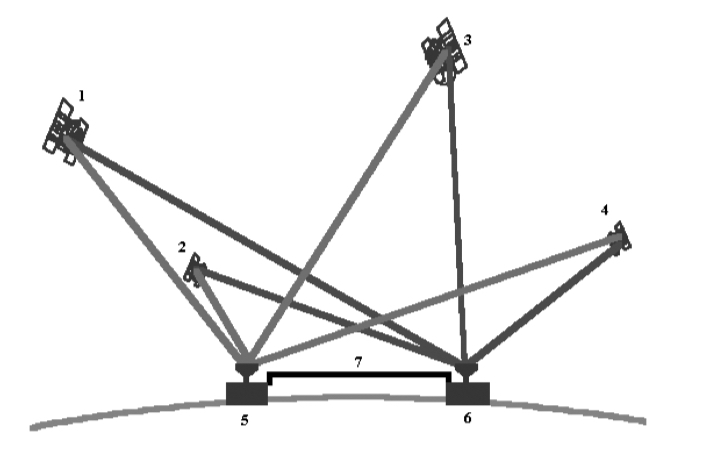
Рис. 3. Дифференциальный режим СНС. (1, 2, 3, 4 – спутники; 5 – приёмник; 6 – потребитель; 7 – канал связи).
При реализации дифференциального режима используют два метода формирования поправок:
Метод, при котором поправки на базовой станции формируются только для созвездия НКА, используемого в определенном пункте, что является существенным недостатком метода.
Метод, при котором на базовой станции определяются поправки для всех спутников, которые потенциально могут быть использованы потребителями. Недостатком этого метода является усложнение аппаратуры потребителей.
Передача дифференциальных поправок от базовой станции к потребителю может осуществляться с помощью телефонной или радиосвязи, по системам спутниковой связи (например INMARSAT), а так же с использованием технологии передачи цифровых данных RDS (Radio Data System) на частотах FM-станций.
В настоящее время во многих странах уже действует развитая сеть базовых станций, постоянно транслирующих поправки на определенную территорию. Например в США дифференциальные поправки передаются береговой охраной через морские радиобуи, работающие в диапазоне 283,5…325 кГц. Под Санкт-Петербургом в феврале 1998 года была установлена первая базовая станция, которая передаёт поправки на частоте 298,5 кГц.
Так же, помимо DGPS, существуют глобальные системы дифференциальной навигации (GDGPS). Они используют наземную сеть станций сбора информации и метод формирования дифференциальных поправок. Основное отличие заключается в том, что исключение ионосферных ошибок в GDGPS осуществляется путём использования двухчастотных измерений.
В настоящее время единственная в мире система GDGPS использует в качестве основы станции GPS сети NASA. Для оперативного уточнения орбит навигационных спутников в этой системе используется пакет прикладных программ RTG (Real Time Gipsy). Для передачи измерений в центр обработки используется сеть Internet.
Глава 4. СТРУКТУРНЫЕ СХЕМЫ СЕТИ.
4.1. Схема орбитальной группировки НКА системы NAVSTAR-GPS.
Орбитальная группировка содержит 24 штатных НКА на круговых синхронных орбитах с периодом обращения Т = 12 ч 00 мин (высота орбиты составляет около 20.000 км над поверхностью Земли) в шести орбитальных плоскостях (по четыре НКА в каждой) с наклонением 55 градусов, долготы восходящих узлов смещены с интервалом 60 градусов. (Рис. 4)
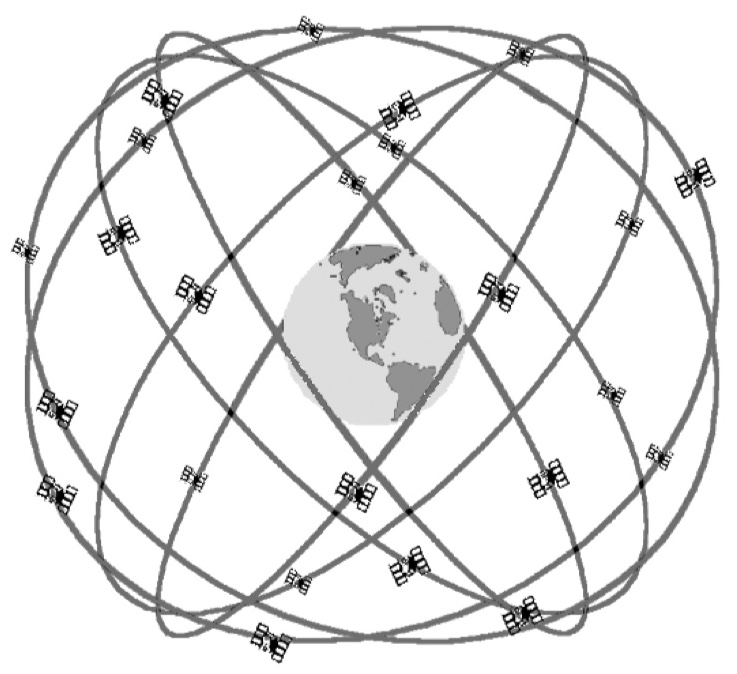
Рис. 4. Орбитальная группировка НКА системы NAVSTAR-GPS.
4.2. Схема формирования сигналов НКА.
Схема формирования сигналов спутника системы GPS содержит два несущих колебания частотой 1572,42 МГц (L1) и 1227,6 МГц (L2), которые модулируются в фазовых модуляторах 3-4 псевдослучайными сигналами СА- и Р-кода, предварительно просуммированными по модулю 2 элементами 1 и 2 с навигационным сигналом NAV, который передаётся со скоростью 50 бит/с. Мы можем заметить, что несущая L2 модулируется только с суммарным сигналом Р-кода, тогда как L1 – суммарными сигналами СА- и Р-кода. В последнем случае кодовые сигналы находятся в квадратуре (сдвинуты на 90 градусов). (Рис.5).
Р-код (от Precision – точный) предназначен для высокоточных измерений (в режиме PPS – Precise Positioning Service) и используется преимущественно военным ведомством США (после введения в 1994 г. Дополнительной криптозащиты (АS – Anti-Spoofing) он обозначается как P(Y)). Поскольку этим кодом модулируются обе несущие, то сравнение времени прихода сигналов на частотах L1 и L2 позволяет вычислять дополнительную задержку, возникающую при прохождении сигналов через ионосферу, что значительно повышает точность измерений.
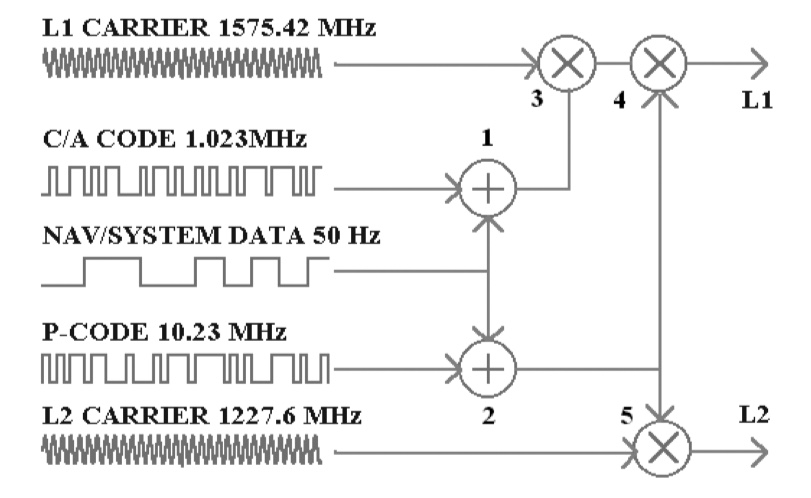
Рис. 5. Схема формирования сигналов НКА. (L1, L2 – несущие колебания; 1, 2 – элементы с навигационным сигналом; 3, 4 – модуляторы).
4.3. Схема формирования сигналов СА-кода.
Общедоступный СА-код (от Coarse Acguition – грубый захват) используется в режиме SPS (Standard Positioning Service – стандартная точность измерений). Если в режиме PPS ошибка измерения горизонтальных координат не превышают 22 м, высоты – 27,7 м и времени 0,09 мкс, то в SPS режиме она увеличивается соответственно до 100 м, 140 м и 0,34 мкс.
Схема формирования СА-кода содержит два 10-разрядных регистра сдвига 1 и 2, в цепях обратных связей которых включены логические элементы 4, 5 в соответствии с образующими многочленами G1, G2. В исходном состоянии оба регистра устанавливаются в единичное состояние. Дополнительное управление регистрами осуществляется блоком 3 кодового контроля изменения эпохи. Как видно из схемы, регистр 2 используется также для установки кода номера спутника PRN (Pseudo Random Number) совместно с элементом 6, выходной сигнал которого суммируется по модулю 2 (элемент 7) с выходным сигналом первого регистра, формируя таким образом в окончательном виде СА-код. (Рис. 6)
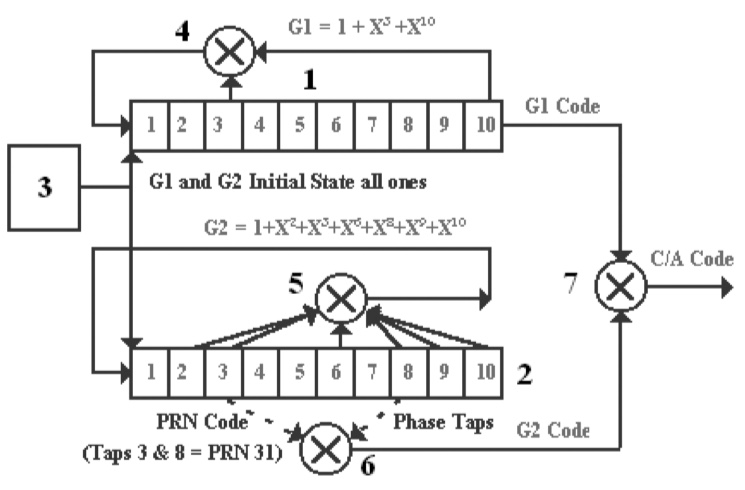
Рис. 6. Схема формирования СА-кода. (1, 2 – 10-разрядные регистры сдвига; 3 – блок кодового контроля изменения эпохи; 4, 5 – логические элементы; 6 – установщик кода номера спутника; 7 – выходной сигнал СА-кода).
Структурная и функциональные схемы приёмника.
Структурная схема приёмника
Приёмник содержит антенну 1 (выносную или встроенную), предуселитель-коррелятор 2, тактируемый подстраиваемый генератором 6, смеситель 3 входного сигнала и выходного сигнала формирователя 5 «местного» СА-кода, демодулятора-декодера 4 и блока обработки информации 10, куда поступают навигационные сигналы (по шине 7), СА-код (по шине 8) и отметки времени (по шине 9). С выхода 11 блока 10 информация о координатах и времени в формате NMEA-183 поступает на регистратор с последующим отображением на дисплее специализированного прибора (навигатора), переносного или карманного ПК. (Рис. 7)
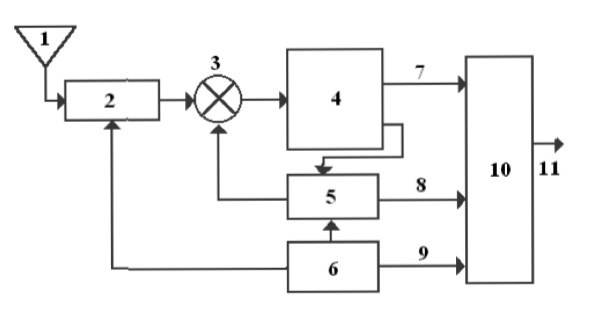
Рис. 7. Структурная схема приёмника. (1 – антенна; 2 – предуселитель-коррелятор; 3 – смеситель входного и выходного сигнала; 4 – демодулятор-декодер; 5 – формирователь местного СА-кода; 6 – генератор; 7, 8, 9 – шины, 10 – блок выхода информации, 11 – выход).
Функциональная схема приёмника.
Преобразовательная часть приёмника содержит фазовые детекторы 2 и 3, управляемые подстраиваемым генератором 5. На выходе детектора 2 выделяется синфазная составляющая I входного GPS-сигнала 1, которая представляет собой навигационный сигнал. Эта составляющая через низкочастотный фильтр 4 передаётся на выход 11 и вход квадрата 9. Квадратурная составляющая GPS-сигнала Q выделяется детектором 3 и после фильтрации в фильтре 6 и возведения в квадрат (квадратор 10) суммируется в сумматоре 12 с квадратом синфазного сигнала. При этом суммарный сигнал квадратов I и Q используется в качестве оценки степени корреляции «местного» сигнала СА-кода с его значением в GPS-сигнале. Одновременно сигналы I и Q сравниваются с детектором 8. Формируемый при этом сигнал рассогласования после прохождения через цифровой фильтр 7, используется для автоподстройки тактового генератора 5, выполняющего роль часов приёмника. (Рис. 8)
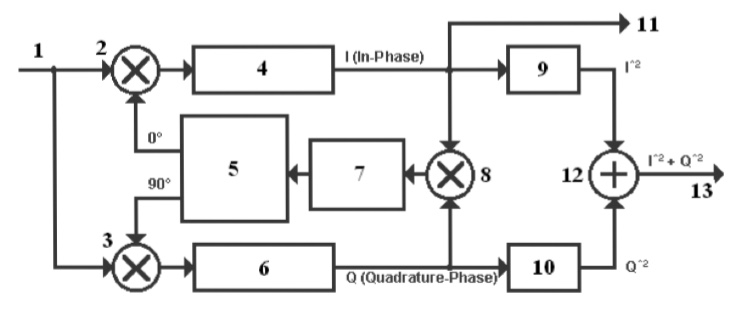
Рис. 8. Функциональная схема приёмника. (1 – входной сигнал GPS; 2, 3 – детекторы; 4 – низкочастотный фильтр, 5 – тактовый генератор; 6 – фильтр; 7 – цифровой фильтр; 8 – детектор, 9 – вход квадрата, 10 – квадратор, 11 – выход квадрата, 12 – суммирование квадрата синфазного сигнала; 13 – выход сигнала).
Глава 5. ВЫВОД.
Функции GPS используются сейчас практически всеми людьми, начиная от обычного пользователя, заканчивая военными. Самое востребованное устройство GPS – автомобильный навигатор. Он намного сложнее и функциональнее обычного приёмника. Весь необходимый софт уже установлен производителем, операционная система закрытая. К навигации прибавляют много дополнительных функций, включая выход в интернет.
Отдельный класс устройств – смартфоны со встроенными приемниками GPS. Не путайте их с моделями, использующими сотовую навигацию! Система работает на смартфонах не так гладко, как на самостоятельных устройствах. Не все модели позволяют поставить полноценный навигационный софт, а если пользоваться онлайн-решениями, то функция станет недоступна при отключении интернета, и тогда исчезнет одно из преимуществ технологии: постоянный доступ. Однако смартфоны со спутниковой навигацией подходят для пешеходов – ориентироваться удобно и данные точные, поэтому вы не заблудитесь даже в непроходимой чаще.
Глава 6. СПИСОК ЛИТЕРАТУРЫ.
Карлащук В.И. , Карлащук С.В. Спутниковая навигация. Методы и средства // Изд. 2-е переработанное и дополненное — М.: СОЛОН-ПРЕСС, 2008 — 288 с.: ил. — (Серия «Библиотека инженера»).
GPS – История, применение, преимущества и недостатки спутниковой системы. URL: https://ru.navirec.com/faq/gps/
Принцип и схема работы системы спутниковой навигации GPS. URL: https://arduinomaster.ru/datchiki-arduino/sistema-sputnikovoj-navigacii-gps/#_GPS-3
GPS: Что это такое и зачем нужен? - МСС Глонасс. URL: https://mssglonass.ru/articles/chto-takoe-gps-dzhipies/#one
|
 Скачать 0.71 Mb.
Скачать 0.71 Mb.