мех. Структура и принципы интеграции мехатронных модулей и машин. Структура и принципы интеграции мехатронных модулей и машин Структура мехатронных модулей
 Скачать 0.75 Mb. Скачать 0.75 Mb.
|

|
Структура и принципы интеграции мехатронных модулей и машин Структура мехатронных модулей Мехатронные модули по составу объединяемых устройств и элементов можно подразделить на три группы (рис.3.1): модули движения; мехатронные модули движения; интеллектуальные мехатронные модули. 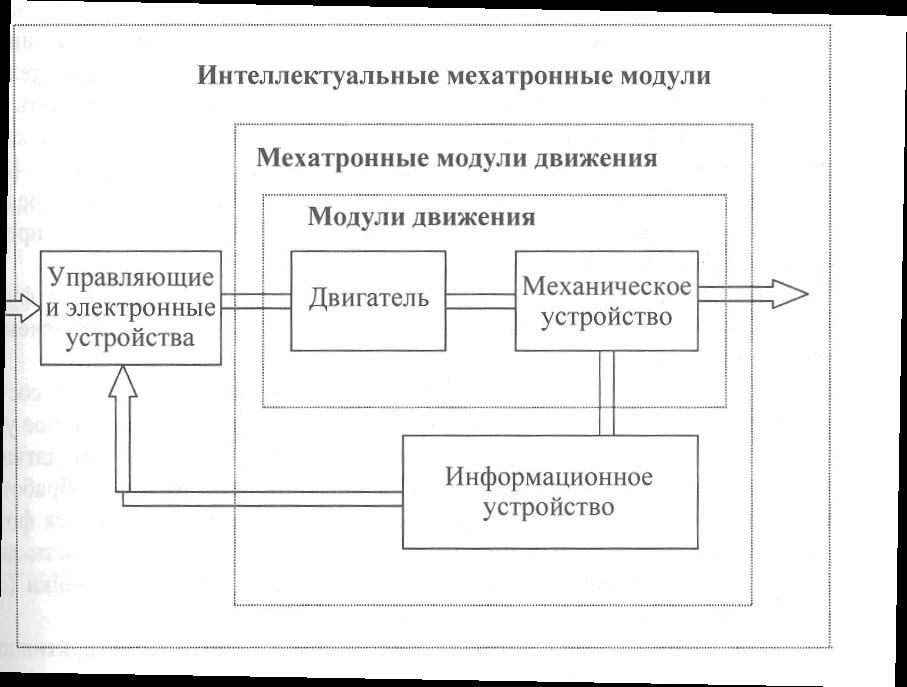 Рисунок 3.1 .- Структура мехатронных модулей. Модуль движения (МД) — конструктивно и функционально самостоятельное изделие, в котором конструктивно объединены управляемый двигатель и механическое устройство. Главным отличающим признаком модуля движения от общепромышленного привода является использование вала двигателя в качестве одного из элементов механического преобразователя движения. В современных мехатронных модулях наиболее часто используются электрические двигатели - асинхронные и синхронные электромашины, двигатели постоянного тока, шаговые и пьезоэлектрические двигатели и др. Однако для многих прикладных задач целесообразно применять мехатронные модули на основе электрогидравлических двигателей. В состав механического устройства могут входить разнообразные редукторы, преобразователи движения, вариаторы, ограничительные и предохранительные элементы. Мехатронный модуль движения (ММД) - конструктивно и функционально самостоятельное изделие, включающее в себя управляемый двигатель, механическое и информационное устройства. Как следует из данного определения, по сравнению с МД в состав мехатронного модуля движения входит встроенное информационное устройство (см. рис.3.1). Информационное устройство включает датчики обратной связи и информации, а также электронные блоки для обработки и преобразования сигналов. Примерами таких датчиков являются фотоимпульсные датчики (инкодеры), дающие информацию о скорости движения и угловом перемещении , оптические линейки, вращающиеся трансформаторы и т.д. Пример ММД приведен на рис. 3.2 Интеллектуальный мехатронный модуль (ИММ) - конструктивно и функционально самостоятельное изделие, построенное путем синергетической интеграции двигательной механической, информационной, электронной и управляющей частей. Таким образом, по сравнению с мехатронными модулями движения в конструкцию ИММ дополнительно встраиваются управляющие и электронные устройства, что придает этим модулям интеллектуальные свойства. К этой группе можно отнести: цифровые вычислительные устройства (микропроцессоры, сигнальные процессоры и т.п.), электронные силовые преобразователи, компьютерные устройства сопряжения и связи.  Рисунок 3.2 Мотор-шпиндель как пример ММД В полной мере определению мехатроники соответствуют только интеллектуальные мехатронные модули, которые содержат все три определяющие подсистемы. Однако первые два вида модулей также построены на мехатронных принципах интеграции элементов, без их изучения нельзя понять эволюцию мехатроники. При этом в настоящее время именно МД и ММД являются объектами серийного производства, а интеллектуальные мехатронные модули появились на рынке наукоемкой продукции сравнительно недавно. Структура мехатронных машин Мехатронные машины - это интеллектуальные многомерные системы, построенные на мехатронных принципах и технологиях, которые способны эффективно выполнять программы функциональных движений в изменяющихся условиях внешней среды. Рассмотрим обобщенную структуру мехатронных машин, которая представлена на рис. 3.3. Внешней средой для горных машин является технологическая среда, которая содержит различное основное и вспомогательное оборудование, технологическую оснастку и объекты работ (горный массив, разрушенная порода). 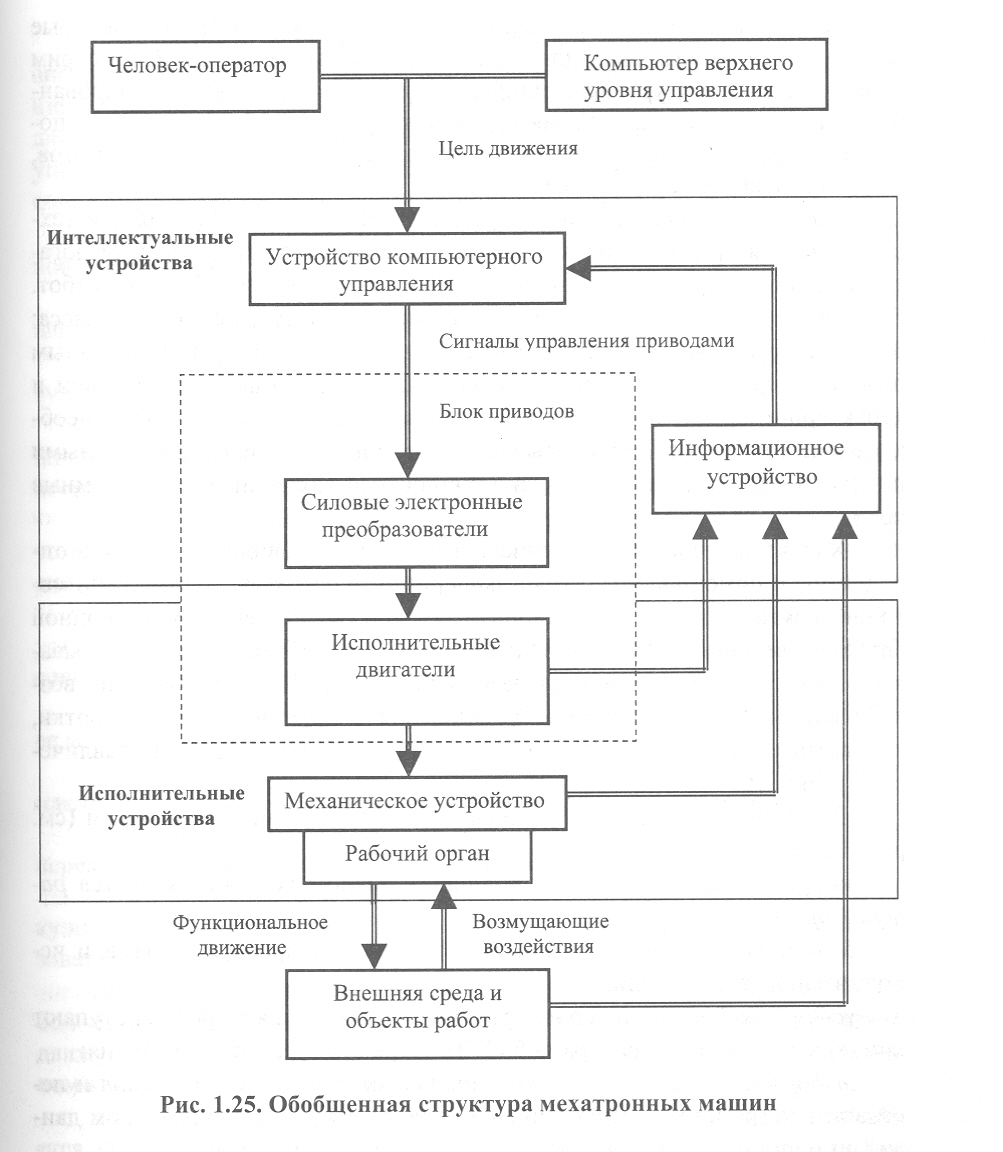 Рисунок 3.3.- Структура мехатронной машины Внешние среды укрупненно можно разделить на два основных класса: детерминированные и недетерминированные. К детерминированным относятся среды, для которых параметры возмущающих воздействий и характеристики объектов работ могут быть заранее определены с необходимой точностью. Некоторые среды являются недерминированными по своей природе, например, экстремальные подводные и подземные среды. При выполнении мехатронной системой заданного функционального движения объекты работ оказывают возмущающие воздействия на рабочий орган. Примерами таких воздействий могут служить силы резания породы, силы погрузки перемещения и т.д. В состав мехатронной машины входят 5 основных частей (см. рис.3.3): механическое устройство, конечным звеном которого является рабочий орган; исполнительные двигатели; силовые преобразователи; устройство компьютерного управления, на вход которого поступают команды человека-оператора либо ЭВМ верхнего уровня управления; информационное устройство, предназначенное для получения и передачи в устройство компьютерного управления данных о реальном движении машины и о фактическом состоянии ее подсистем. Механическое устройство и двигатели объединены в группу исполнительных устройств. В состав группы интеллектуальных устройств включены электронная (силовые преобразователи), управляющая и информационная части машины. Устройством компьютерного управления будем называть комплекс аппаратных и программных средств, вырабатывающий сигналы управления для блока приводов машины. В состав этого комплекса обычно входят задающие устройства (например, джойстики и рукоятки), пульт управления оператора, вычислительные и преобразующие устройства, периферийные устройства ввода-вывода информации. Устройство компьютерного управления выполняет следующие основные функции: Управление функциональными движениями мехатронной машины в реальном масштабе времени. Координация управления механическим движением с сопутствующими внешними процессами. Взаимодействие с человеком-оператором через человеко-машинный интерфейс в режимах программирования (режим off-line) и непосредственно в процессе движения (режим on-line). Обмен данными с внешними устройствами (информационным устройством, блоком приводов, компьютером верхнего уровня, периферийными устройствами). Информационное устройство предназначено для сбора и передачи в устройство управления информации о фактическом состоянии внешней среды и движущейся мехатронной машины. Согласно представленной блок-схеме в информационном устройстве можно выделить три группы сенсоров: датчики информации о состоянии внешней среды и объектов работ (системы технического зрения, локационные датчики и дальномеры, т.д.); датчики информации о движении механической части (датчики перемещений, скоростей, ускорений, сил и моментов); датчики обратной связи блока приводов (дают информацию о текущих значениях электрических токов и напряжений в силовых преобразователях). Механическое устройство мехатронной машины представляет собой многозвенный механизм, кинематическую цепь которого образуют движущиеся звенья, составляющие кинематические пары. Конечным звеном кинематической цепи является рабочий орган. Структура и принципы интегрирования мехатронных горных машин Применительно к мехатронным горным машинам с точки зрения физической природы структурных элементов целесообразно выделить следующие 4 компоненты: механическую, силовую (электротехническую, гидравлическую или пневматическую), электронную и информационную. Опишем компоненты, составляющие мехатронную горную машину, и определим возможные виды связей между ними, что позволит формализовать машину в виде структурных формул. Механическая компонента (М) обеспечивает различные виды движения объекта в целом, или его составных частей. К М-компоненте относятся редуктора, различные преобразователи движения (зубчато-реечный механизм, кривошипно-шатунный механизм и т.п.), передаточные звенья (муфты и т.п.). Силовая компонента обеспечивает преобразование электрической, гидравлической или пневматической энергии. (С –компонента может быть соответственно электротехнической (Сэ), гидравлической(Сг) и пневматической (Сп) К Сэ-компоненте относятся электродвигатели, электромагнитные муфты и тормоза, электромагниты и т.п. К Сг-компоненте относятся гидрораспределители, гидроцилиндры, гидромоторы, гидронасосы. Электронная компонента (Э) обеспечивает формирование, передачу и обработку электрических сигналов. К Э-компоненте относятся электронные устройства, такие как микропроцессоры, преобразователи частоты и т.п. Информационная компонента (И) обеспечивает формирование, хранение, передачу и обработку информационных сигналов. К И-компоненте относятся датчики, программное обеспечение. Возможны следующие виды связей между компонентами Согласование (-) – связь, при которой каждая из компонент имеет собственные параметры, ограничения и конструктивное исполнение, параметры компоненты согласованы для достижения общей цели. Такой вид связи имеет место, например, в обычном типе привода, имеющем стандартные электродвигатель и редуктор. Конструкция двигателя и редуктора никак не зависят друг от друга, компоненты могут быть использованы по отдельности, но для совместной работы должны быть согласованы. Согласование достигается подбором определенных параметров, введением согласующих устройств (муфты, различные защиты и т.п.). Структурная формула такого привода М-Сэ. Соединение (+) – связь, накладывающая общие ограничения на компоненты и их параметры, каждая компонента имеет собственное конструктивное исполнение и при соединении для достижения поставленной цели образуется новая структурная единица, с собственными функциями и ограничениями. Примером такой связи могут служить практически все типы приводов очистных комбайнов, так как конструкция и параметры двигателей и редукторов жестко взаимосвязаны, двигатель и редуктор, соединенные тем или иным образом , образуют корпусную подсистему машины. Структурная формула для такого привода М+Сэ. Совмещение (·) – связь, при которой ограничения, параметры и конструктивное исполнение для компонент являются общими, компоненты составляют единое устройство и неразрывно связаны для достижения поставленной цели. В технике привода примером такой связи являются мотор-редукторы, структурная формула М·Сэ. Синергетическое объединение может быть реализовано двумя основными способами: - функционально-структурная интеграция (далее ФС-интеграция), заключающаяся в минимизации структурных блоков, необходимых для реализации необходимых функций, сокращения числа согласующих устройств (пример- исключение редуктора в современных механообрабатывающих станках см. рис.); - структурно-конструктивная интеграция (далее СК-интеграция), заключающаяся в минимизации конструктивных решений для реализации необходимой структуры (пример – выполнение модуля в едином корпусе см рис.). ФС-интеграция приводит к замене связи «согласование» (-) связью «соединение» (+), СК интеграция – к замене связи «соединение» (+) связью «совмещение» (·), связь (-) означает отсутствие интеграции, поэтому в дальнейшем связи (+) и (·) будем называть интегрирующими. Объединение компонент подразумевает наличие любой связи между ними, интеграция – только интегрирующей. Используя принятые определения можно составить структурные формулы для машин очистного комплекса. В угольном машиностроении, в первую очередь при проектировании очистных комбайнов для тонких пластов, практически реализовывалась СК-интеграция. Необходимость в этом была вызвана жесткими требования к габаритам и компоновке комбайнов, при достаточно высокой реализуемой мощности, что делало невозможным подход, при котором отдельно проектируется редуктор, двигатель, затем при помощи различных узлов (рама, муфты и т.п.) они объединялись в привод. Узкозахватные очистные комбайна первого поколения имели электрический привод режущего органа и гидрообъемный привод подачи, ручное управление (комбайн 1К101). Структурная формула комбайнов этого поколения может быть записана как
Уже на этом этапе очистные комбайны могли оснащаться и электронными компонентами (например, системой радиоуправления ЛИРА), причем практически на всех комбайнах были регуляторы различной физической природы и степени сложности (например, УРАН). Основной вид регулятора для очистного комбайна это регулятор нагрузки и скорости, обеспечивающий максимальную производительность комбайна при заданной нагрузке. Структурная формула в этом случае
Комбайны следующего поколения (К103) имели лучшие функционально-параметрические характеристики (в первую очередь, снижение зольности при той же производительности (скорости подачи)), и состояли из привода резания, двух приводов подачи с электрмагнитными муфтами, имели ручное управление. Структурная формула такого комбайна
Дальнейшее развитие очистных комбайнов и повышение функционально-параметрических характеристик (в первую очередь, скорости подачи, определяющую производительность), потребовало применения электрического привода подачи с высоким моментом и большим диапазоном скоростей. Комбайны нового поколения (УКД300) имеют частотно-регулируемый двух двигательный привод подачи, два привода резания со встроенными гидронасосами, дистанционное и автоматизированное управление, структурная формула комбайна
Первый член уравнения описывает привод подачи, второй привод резания, третий гидросистему, четвертый систему управления. Не рассматривая подробно историю развития забойных конвейеров и механизированных крепей, запишем структурные уравнения для нового поколения двухскоростных скребковых конвейеров
и секции механизированной крепи с электрогидроуправлением
Анализ структурных уравнений показывает, что, перечисленные выше машины, удовлетворяют и необходимому и достаточному условию мехатронности, и могут рассматриваться как МО. |