Электропривод. Эл. прив. (Вар. 15) - №1. Судовые Электрические Машины постоянного тока
 Скачать 305.09 Kb. Скачать 305.09 Kb.
|

К  афедра _______ЭТ и ЭО______________ афедра _______ЭТ и ЭО______________Отчёт по На тему: Судовые Электрические Машины постоянного тока _______________________________________________________________ РУКОВОДИТЕЛЬ: _______Асистент_____________ (ученая степень, должность) _Сомов Аркадий Александрович (Ф.И.О.) СТУДЕНТ: _____ЭС-320-ЗФ______________ (форма обучения, гр., шифр) Симбирцев Владислав Михайлович (Ф.И.О.) Омск 2023 г. Задание 1 1. Используя справочные материалы (приложение 1) по марке двигателя (ДПТ НВ) определить его основные номинальные данные: – мощность P2N , кВт; – скорость вращения n2N , об/мин; – напряжение UN, В; – сила тока IN, А; – сопротивление обмотки якоря Rя , Ом; 2. Построить естественную характеристику двигателя постоянного тока ω = f (M) 3. Построить искусственные характеристики двигателя постоянного тока, изменяя величину подводимого напряжения значениями 0,3∙UN, 0,5∙UN, 0,75∙UN, UN. 4. Построить искусственные характеристики двигателя постоянного тока, изменяя величину магнитного потока возбуждения значениями 0,3∙ФN, 0,5∙ФN, 0,75∙ФN, ФN. 5. Построить искусственные характеристики двигателя постоянного тока, изменяя величину сопротивления якорной цепи значениями 7∙Rя, 5∙Rя,2∙Rя, Rя .
Решение:  Рисунок 1.1 - Схема включения двигателя постоянного тока. Естественная характеристика двигателя. Уравнение естественной механической характеристики двигателя:  (1.1) (1.1)Номинальная угловая скорость:  (1.2) (1.2) Используя параметры номинального режима двигателя можно определить величину коэффициента ЭДС машины:  (1.3) (1.3) где  - сопротивление якоря двигателя. - сопротивление якоря двигателя.Угловая скорость идеального холостого хода:  (1.4) (1.4) Номинальный момент на валу двигателя:  (1.5) (1.5) Механическая характеристика двигателя постоянного тока независимого возбуждения представляет собой прямую линию, которую можно построить по двум точкам. Для построения естественной механической характеристики задаемся координатами двух точек. Координаты 1-й точки:  ; ;  . .Координаты 2-й точки:  ; ;  . .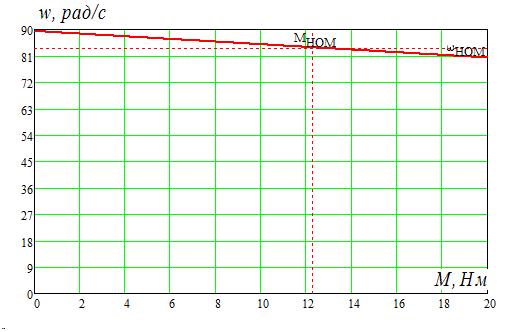 Рисунок 1.2 – Естественная механическая характеристика двигателя постоянного тока независимого возбуждения. Искусственные характеристики двигателя постоянного тока, при изменении величины подводимого напряжения при значениях 0,3∙UN, 0,5∙UN, 0,75∙UN, UN строятся по уравнению:  (1.6) (1.6)Для построения искусственных характеристик при изменении напряжения задаемся двумя точками для каждой характеристики: Для напряжения на якоре 0,3∙UN: Координаты 1-й точки: ;  . .где угловая скорость идеального холостого хода равна:  Координаты 2-й точки: ;  где угловая скорость вращения:  Для напряжения на якоре 0,5∙UN: Координаты 1-й точки: ;  . .где угловая скорость идеального холостого хода равна:  Координаты 2-й точки: ;  где угловая скорость вращения:  Для напряжения на якоре 0,75∙UN: Координаты 1-й точки: ;  . .где угловая скорость идеального холостого хода равна:  Координаты 2-й точки: ;  где угловая скорость вращения:  По рассчитанным точкам строятся искусственные механические характеристики при изменении напряжения на якоре. 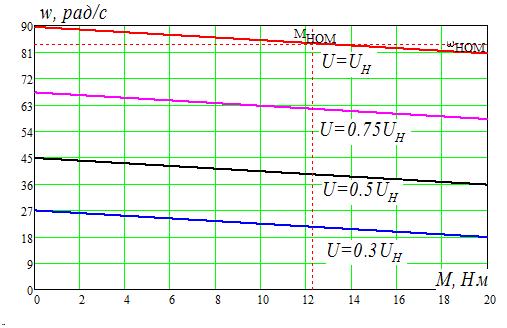 Рисунок 1.3 – Искусственные механические характеристики при изменении напряжения на якоре. Искусственные характеристики двигателя постоянного тока, при изменении величины магнитного потока возбуждения при значениях 0,3∙ФN, 0,5∙ФN, 0,75∙ФN, ФN. строятся по уравнению:  (1.7) (1.7)Для построения искусственных характеристик при изменении магнитного потока задаемся двумя точками для каждой характеристики: Для значения 0,3∙ФN: Координаты 1-й точки: ;  . .где угловая скорость идеального холостого хода равна:  Координаты 2-й точки: ;  где угловая скорость вращения:  Для значения 0,5∙ФN: Координаты 1-й точки: ;  . .где угловая скорость идеального холостого хода равна:  Координаты 2-й точки: ;  где угловая скорость вращения:  Для значения 0,75∙ФN: Координаты 1-й точки:  ; ;  . .где угловая скорость идеального холостого хода равна:  Координаты 2-й точки:  ; ;  где угловая скорость вращения:  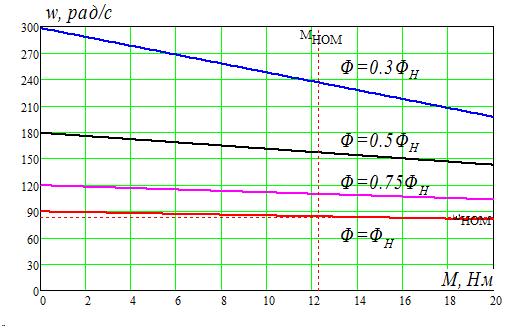 Рисунок 1.4 – Искусственные механические характеристики при изменении магнитного потока. Искусственные характеристики двигателя постоянного тока, при изменении величины сопротивления якорной цепи при значениях 7∙Rя, 5∙Rя,2∙Rя, Rя строятся по уравнению:  (1.8) (1.8)При изменении величины сопротивления якорной цепи изменение угловой скорости холостого хода не происходит, следовательно для всех искусственных характеристик общей точкой будет  . .Для построения искусственных характеристик при изменении магнитного потока задаемся двумя точками для каждой характеристики: Для значения 7∙Rя: Координаты 1-й точки: ; .Координаты 2-й точки: ;  где угловая скорость вращения:  Для значения 5∙Rя: Координаты 1-й точки: ; .Координаты 2-й точки: ;  где угловая скорость вращения:  Для значения 2∙Rя: Координаты 1-й точки: ; .Координаты 2-й точки: ;  где угловая скорость вращения:  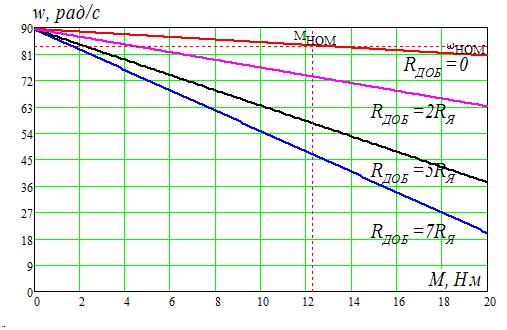 Рисунок 1.5 – Искусственные механические характеристики при изменении сопротивления якорной цепи. Заключение В ходе выполнения работы определили параметры двигателя постоянного тока независимого возбуждения. Проанализировав построенные механические характеристики можно сделать вывод: При регулировании скорости вращения изменением магнитного потока можно регулировать скорость вверх от номинальной. При таком регулировании к.п.д. двигателя остается высоким, так как мощность возбуждения мала, в частности мала мощность реостатов для регулирования тока возбуждения. К тому же при уменьшении iв мощность возбуждения Uiв уменьшается. Верхний предел регулирования скорости вращения ограничивается механической прочностью машины и условиями ее коммутации. Введение дополнительного сопротивления при неизменных величинах напряжения якоря и магнитного потока: а) не приводит к изменению скорости холостого хода; б) приводит к уменьшению жесткости механической характеристики; в) приводит к уменьшению пускового момента. При изменении величины напряжения на якоре изменять напряжение можно только в сторону уменьшения, так как увеличение U больше номинального ухудшает условия коммутации (увеличивается искрообразование) и опасно для изоляции обмоток машины. Данный способ, согласно выражениям дает возможность регулировать скорость также вниз от номинальной. КПД двигателя при этом остается высоким, так как никаких добавочных источников потерь в схему двигателя не вносится. Однако в этом случае необходим отдельный источник питания с регулируемым напряжением, что удорожает установку. Отсюда видно, что величина напряжения якоря U влияет на значение скорости холостого хода, критического момента МК и не влияет на жесткость (наклон) механических характеристик. Список Литературы 1. Хацевский, К.В. Электрический привод [Текст]: учебное пособие/К.В. Хацевский. – Омск: Омский институт водного транспорта (филиал) ФГОУ ВПО «НГАВТ», 2011. – 40 с. 2. Чиликин, М.Г. Общий курс электропривода [Текст]: учебник для вузов /М.Г. Чиликин, А.С. Сандлер. – М.: Энергоиздат, 1981.– 576 с. 3. Андреев, В.П. Основы электропривода [Текст]: учеб. пособие для студентов вузов. /В.П. Андреев, Ю.А. Сабинин. – М.: Энергия, 1976. – 285с. 4. Копылов И.П. Электромеханические преобразователи энергии [Текст]: учебник для вузов /И.П. Копылов. – М.: Энергия, 1973. – 400 с. |