Дипломная работа тема техническое обслуживание систем автоматики. Маутханов. Техническое обслуживание систем устройств автоматики
 Скачать 285.03 Kb. Скачать 285.03 Kb.
|

1 2 УПРАВЛЕНИЕ ОБРАЗОВАНИЯ АЛМАТИНСКОЙ ОБЛАСТИ ГККП ТАЛГАРСКИЙ ПОЛИТЕХНИЧЕСКИЙ КОЛЛЕДЖ «Утверждаю» директор колледжа ___________Садыкова Р. Н. «______»___________2021г. Форма обучения: очная Специальность: «Фермерское хозяйство» Квалификация: «Электромонтер по обслуживанию электрооборудования» Курс 3 группа 32 Дипломный проект Тема: Техническое обслуживание систем устройств автоматики  Дипломник __________ Маутханов Е Руководитель___________________________________ Толемис К.Т по разделу «Техника безопасности»________________ Бекболатов Ж. Н. Рецензент _____________________ Темирбеков М.К. Допустить к защите __________ зам. директора по УПР Бекболатов Ж. Н. Зам директор по П.О_________________________ Ералиев К.А Защитил с оценкой _____________________________________ г. Талгар 2020 Управление образования Алматинской области ГККП «Талгарский политехнический колледж» Рассмотрен: Утверждаю: на заседании ПЦК «Технических дисциплин» протокол № ___ от «__»____г _________ Исаева А.Т. Зам.директор по УПР ________ Бекболатов Ж.Н. «___»_________20___г. Срок сдачи дипломной работы «__»_______20____г. Специальность: 1504000 - Фермерское хозяйство Квалификация: 1504092 – Электромонтер по ремонту и обслуживания электрооборудования ЗАДАНИЕ НА ВЫПОЛНЕНИЕ ДИПЛОМНОЙ РАБОТЫ Обучающийся: Тема: Техническое обслуживание систем устройств автоматики Краткое содержание дипломной работы: а) Введение. б) Основная теоретическая часть в) Охрана труда г) Список использованных литератур Рекомендуемая основная литература: Техническое обслуживание, ремонт электрооборудования и сетей промышленных предприятий: В 2 кн. Кн. 1 учебник,Сибикин Ю.Д.,2017 Справочник электромонтера (8-е изд., стер.) учеб. Пособие,Москаленко В.В.,2014 3 Пястолова И.А. Эксплуатация и ремонт электроустановок. Учебное пособие. 3-е изд., доп. и перераб. 2017 Правила устройства электроустановок. (ПУЭ РК) Астана 2014 г. Электробезопасность при эксплуатации электроустановок промышленных предприятий учеб. пособие,Сибикин Ю.Д.,2014 Оформление дипломной работы: Текст дипломной работы набранный на компьютере в Формате А4 объем листов 25-30 листов, рукописью не менее 35-40 листов. Шрифт: Times new Roman 14 кегль, с левой стороны -30мм, с права-10мм, с верхней части-20мм, с нижней части-15мм, между строчный интервал 1,15. Нумерация начинается с 3 листа «Содержания», каждая глава начинается с нового листа. В графической части дипломной работы должны отражаться таблицы, картинки и иллюстративные материалы. Руководитель дипломной работы: ___________ Ознакомлен с заданием: _______________ СОДЕРЖАНИЕ Введение…………………………………………………………………4 А. Элементы автоматики Общие сведения об элементах систем автоматики…………………………………………………………….. 6 Датчики………………………………………………………………… 7 Усилители……………………………………………………………… 19 Стабилизаторы напряжения…………………………………………... 23 Стабилизаторы давления……………………………………………… 26 Переключающие устройства………………………………………...… 27 Магнитные пускатели и реле………………………………………….. 30 Б. Техническое обслуживание устройств и систем автоматики 34 В. Системы автоматики 40 Основные понятия о теории управления……………………………. 40 Основные понятия о системах регулирования, контроля и сигнализации………………………………………………………….. 42 Г. Охрана труда 46 ВВЕДЕНИЕ Автоматикой называется отрасль науки и техники, охватывающая теорию и принципы построения автоматических систем и устройств, выполняющих свои основные функции без непосредственного участия человека. Классификация систем автоматики: бывают: 1. автоматические системы контроля, которые могут иметь разновидности в виде автоматических систем измерения (АСИ) и автоматически систем сигнализации (АСС). 2. автоматические системы управления (АСУ). Частным случаем АСУ является автоматическая система регулирования (АСР). Структурные схемы систем автоматики. Автоматическая система контроля. 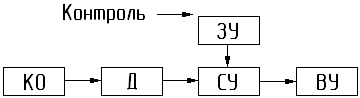 АСК служит для осуществления автоматического контроля одного или нескольких параметров производственного процесса и включает в себя контролируемый объект, датчик, сравнительное устройство, задающее устройство, воспроизводящее устройство. КО имеет один или несколько контролируемых параметров, которые снимаются датчиком и подаются на сравнивающее устройство, куда поступает эталонное значение параметра, вырабатываемое задающим устройством. В сравнивающем устройстве происходит сравнение текущего контролируемого параметра с эталонным в виде вычитания этих двух величин. Если разница этих двух сигналов равна 0, то текущее значение параметра равно эталонному и воспроизводящее устройство покажет значение ошибки “=0”. Если контролируемый параметр отличается от эталонного, то разностный сигнал будет отображен на воспроизводящем устройстве, который покажет величину ошибки. 2. Системы управления: а) разомкнутая система автоматического управления служит для автоматического управления состоянием, работой и др. функциями управляемого объекта без отображения результатов или при отсутствии результатов управляющего воздействия.  В блок-схему входит задающее устройство, вырабатывающее командный сигнал; преобразующее устройство служит для преобразования и усиления командного сигнала; исполнительное устройство является исполнительным органом, которым может быть эл. Двигатель, пускатель, реле, реостат, потенциометр, взрыватель и т.д.; управляемый объект, который управляется командой с ЗУ. Б) замкнутая система автоматического управления (система автоматического регулирования). Отличается от разомкнутой цепи наличием обратной связи, которая подводит через датчик текущие значения параметра объекта регулирования к сравнивающему устройству, где происходит его сравнение с эталонным значением параметра, вырабатываемым ЗУ. Система автоматического регулирования служит для автоматического поддержания постоянства выходного параметра объекта регулирования с заданной точностью, характеризующую производственный процесс, и включает в себя ЗУ для выработки эталонного значения параметров; СУ для определения разности между эталонным и текущим значением параметра (сигнала рассогласования); исполнительного устройства; объекта регулирования и датчика, предназначенного для снятия текущего значения параметра, его преобразования в необходимый вид сигнала и подачи на сравнивающее устройство. 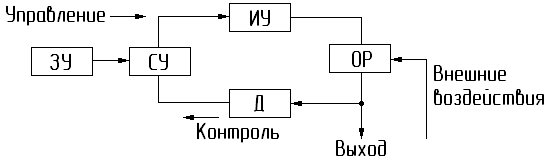 1. Общие сведения об элементах автоматики. Элементом автоматики называется обособленная часть схемы автоматики, функционально выполняющая свою функцию (например усилитель, стабилизатор). Элементы автоматики делятся на: 1. Датчики – это элемент автоматики, функционально преобразующий входную физическую величину в сигнал, удобный для измерения и дальнейшей обработки. 2. Усилитель – это устройство, предназначенное для усиления входных сигналов в виде определенной физической величины (усилитель напряжения, или тока, усилия, давления). 3. Стабилизатор – элемент автоматики, предназначенный для поддержания постоянства физической величины на своем выходе (например, стабилизаторы напряжения, тока, давления). 4. Переключающее устройство – это элемент автоматики, предназнач-енный для коммутации электрических цепей. 5. Исполнительные устройства – это элементы автоматики приводящие в действие регулирующие органы объектов регулирования (электродвигате-ли, электромагнитные муфты, электромагниты). Датчики Структурная схема датчика 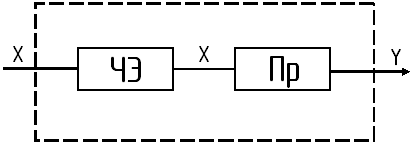 Датчик состоит из двух элементов: 1. Чувствительный элемент – служит для преобразования входной физической величины в сигнал, удобный для измерения. 2. Преобразователь – служит для преобразования входной величины в электрический сигнал. Классификация датчиков: 1. По принципу действия датчики разделяются на параметрические и генераторные. Параметрическими называются датчики, преобразующие входную физическую величину в один из параметров электрической цепи (напряжение, ток, индуктивное, активное или реактивное сопротивление). Генераторные датчики – это датчики, преобразующие входную физическую величину в Э.Д.С. По виду входной величины бывают: датчики перемещения, датчики давления, температуры, скорости, ускорения, усилия и т.д. 3. По виду входного сигнала бывают электрические и неэлектрические. 4. По характеру выходного сигнала бывают непрерывные и дискретные. Основные параметры датчиков: 1. Статические характеристики  выражает зависимость выходной величины датчика от входной величины. выражает зависимость выходной величины датчика от входной величины.2. Статический коэффициент преобразования (передатчик)  определяется отношением выходной величины к входной. 3. Динамический коэффициент преобразования:  определяется отношением приращений выходной величины к приращению входной или производной выходной величины по входной. определяется отношением приращений выходной величины к приращению входной или производной выходной величины по входной.4. Относительный коэффициент преобразования:  определяется отношением относительного приращения выходной величины к относительному приращению входной величины. определяется отношением относительного приращения выходной величины к относительному приращению входной величины.5. Порог чувствительности – наименьшее значение входного сигнала Umin , Pmin , вызывающее изменение выходного сигнала. 6. Инертность датчика – это величина изменения (отставания изменения) выходной величины датчика при изменении входной величины. 7. Абсолютная погрешность датчика – определяется как разница между фактическим (Y1) и измеренным (Y) значением выходной величины  . .8. Относительная погрешность  - определяется как отношение абсолютного значения погрешности выходной величины к ее расчетному значению, уменьшенному на 100%. - определяется как отношение абсолютного значения погрешности выходной величины к ее расчетному значению, уменьшенному на 100%.Параметрические датчики активного сопротивления. К ним относятся: контактные датчики; потенциометрические (реостат- ные) датчики, однотактные и двухтактные; тензометрические датчики; полупроводниковые датчики (p-n переход, термоэлектронный и др.). Контактные датчики: Контактными называются датчики, в которых механическое перемещение преобразуется в замкнутое или разомкнутое состояние контактов, управляющих узлов или несколькими электрическими цепями, при этом сопротивление датчика изменяется от бесконечности до нуля и наоборот. Это датчики, в которых имеется дискретность измерения. Широко применятся в машиностроении при ОТК, механических деталей, их сорти- ровке и отбраковке. Выявляют дефекты деталей с точностью по 1-2 мкм. Устройство датчика: 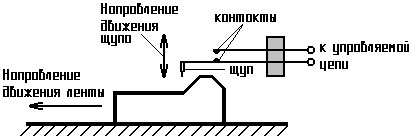 Однотактный (нереверсивный) потенциометрический датчик. 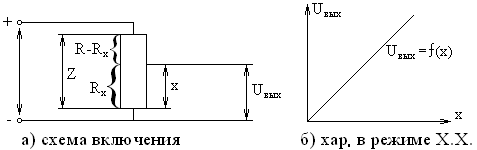 Потенциометрическим называется датчик, предназначенный для преобразования линейного перемещения в электрический сигнал. В зависимости от включения потенциометрический датчик может быть реостатным. Выполнен в виде переменного сопротивления, подвижная часть которого имеет связь с преобразующим элементом. Состоит из каркаса с намотанной проволокой высокого уд. Сопротивления. Производит измерение ошибок и дефектов механических деталей. Работает на постоянном токе и переменном токе. Измеряет дефекты только в одну сторону. Работа датчика. Преобразующий элемент (испытуемая деталь) проходит по конвейеру и воздействует ползунок датчика, при наличии дефекта. При этом по датчику будет протекать ток по цепи: “+” источника, невведенная часть резистора, ползунок, приемник, “-” источника. При этом выходное напряжение равно:  , ,где K – коэффициент пропорциональности L – длина всего реостата X – невведенная его часть Статическая характеристика датчика выражает зависимость выходного напряжения от величины введенной часть ползунка. Чем больше эта величина, тем большее напряжение снимается с датчика. Двухтактный потенциометрический датчик (реверсивный). 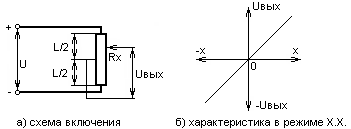 В технике часто применяются датчики, реагирующие на знак допущенной ошибки при изготовлении детали. Для этого применяются потенциометрические датчики со средней точкой (двухтактные). Применяются для измерения углов поворота, а так же линейных размеров механических изделий. Статическая характеристика – прямая линия, пересекающая центр координат, т.е. показывает положительное и отрицательное направление напряжений. Работа датчика: Если датчик имеет номинальные размеры, ползунок находиться ровно посередине линейного размера датчика, т.е. напротив средней точки. Ток будет протекать по цепи: от “+” источника через резистор, через среднюю точку, через ползунок, через остальную часть резистора на “-” источника. Токи, протекающие по нижней и по верхней части, противоположно направлены, общий ток равен нулю. Поэтому на статической характеристике выходное напряжение равно нулю. Если деталь имеет размеры больше номинального, то ток будет протекать по цепи : “+” источника, нижняя часть резистора до ползунка, ползунок, приемник, средняя точка, нижняя часть резистора, “-” источника. Выходное напряжение будет увеличиваться пропорционально перемещению ползунка от средней точки вверх. Если ползунок находиться ниже средней точки, то ток будет протекать по цепи: “+” источника, верхняя часть резистора, средняя точка, приемник, ползунок, нижняя часть резистора, “-” источника. Тензометрические датчики. Тензометрическими называются датчики специальной конструкции, предназначенные для измерения статических или динамических деформаций в механических деталях и преобразующие эти деформации в изменения активного сопротивления. Тензоэффектом называется свойство материалов высокого сопротив- ления изменять свое сопротивление под действием приложенной силы. Тензодатчики бывают проводниковые и фольговые. В качестве проводящих материалов используются нихром, константан, манганин. Конструктивное выполнение: это спираль из материала с высоким удельным сопротивлением, наклеенная на бумажную основу и жестко закрепленную на механическую деталь, после чего деталь подвергается испытаниям на сжатие или растяжение. Эта же сила действует и на датчик. При этом происходит сжатие или растяжение спирали датчика, а следова- тельно и изменение его электрического сопротивления. Если деталь разруша- ется при определенном усилии, то ток, протекающий по измерительному прибору, покажет величину этой силы. Т.О. тензометрические датчики применяются для определения механических усилий при испытаниях металлических деталей. 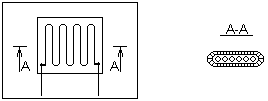 Коэффициент тензочувствительности датчика определяется:  , где , где - абсолютное изменение длины проволоки, - абсолютное изменение длины проволоки, - относительное изменение длины проволоки, - относительное изменение длины проволоки, - относительное изменение сопротивления тензодатчика. - относительное изменение сопротивления тензодатчика.Сопротивление тензодатчика составляет от 200 до 500 Ом, а коэффициент Кт = от 1,8 до 2,5. Статическая характеристика: 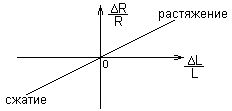 Фольговые тензодатчики. Представляют собой наклеенную на бумагу или пленку решетку из тонких полосок фольги с высоким удельным сопротивлением. Конструкции бывают: прямая, розеточная, мембранная. 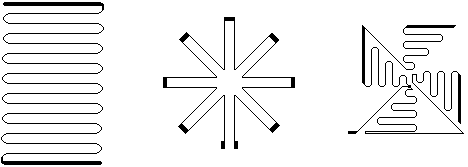 Прямая конструкция применяется для измерения линейных деформаций. Розеточная – для измерения крутящих моментов. Мембранная для измерения усилий, воздействующих на мембраны. Коэффициент тензочувствительности равен 2.5, пропускает ток до 0.2 А, сопротивление датчика от 50 до 200 Ом. Полупроводниковые датчики активного сопротивления. Представляют собой полупроводниковые приборы (транзисторы, фотоэлементы с внутренним фотоэффектом, терморезисторы). Фотоэлектронный датчик представляет собой фоторезистор, включенный в электрическую цепь с приемником. 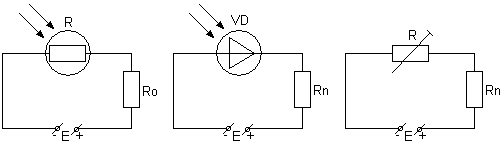 Полупроводниковые датчики активного сопротивления выполняются на полупроводниковых элементах (транзисторах, фототранзисторах, фотодиодах, фоторезисторах, терморезисторах). Работа датчиков : Ф 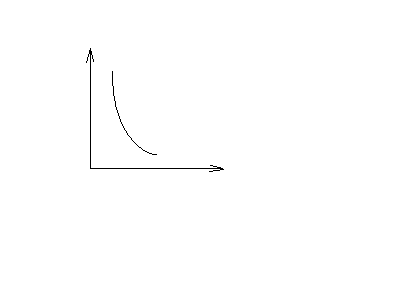 оторезистор изменяет свое сопротивление в зависимости от величины потока освещенности чувствительного элемента. Сопротивление изменяется по закону: если освещенность равна нулю, сопротивление очень велико и обратно. оторезистор изменяет свое сопротивление в зависимости от величины потока освещенности чувствительного элемента. Сопротивление изменяется по закону: если освещенность равна нулю, сопротивление очень велико и обратно.R (Ом) 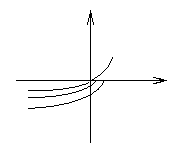 Фотодиод: аналогично. I -u u Терморезисторы – это приборы, сопротивление которых зависит от температуры:  Датчик реактивного сопротивления. К ним индуктивные и емкостные датчики. Индуктивными называются датчики, принцип действия которых основан на изменении индуктивного сопротивления электромагнитного дросселя при перемещении его якоря. Они применяются для измерения угловых и линейных механических перемещений, деформаций и контроля размеров деталей. Представляют собой электромагнитный дроссель с переменным воздушным зазором, обмотка которого включена последовательно с сопротивлением приемника. 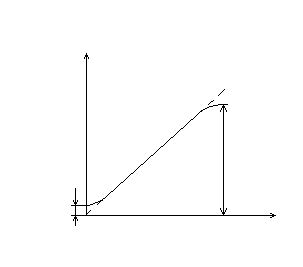 Нереверсивный индуктивный датчик: 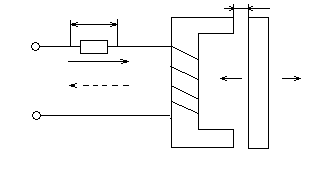 Un Un  Un Un Zn C U Схема включения Статические характеристики Величина индуктивности  Где  - количество витков - количество витков  - магнитная проницаемость - магнитная проницаемость S – сечение - величина зазораС увеличением зазора магнитный поток в катушке возрастает, сердечник насыщается, магнитная проницаемость уменьшается. В результате уменьшается индуктивность обмотки дросселя и уменьшается его индуктивное сопротивление, что вызывает увеличение тока в катушке и в приемнике – вызовет увеличение падения напряжения на нем, которое является выходным напряжением датчика. Поэтому с увеличением зазора выходное напряжение возрастает, как показано на статической характеристике.  Если приемник имеет активную индуктивную составляющую, то Zпр =  Z= Zдр + Zпр  откуда  пр. пр.Датчик обладает высокой чувствительностью, надежностью, имеет достаточно большую выходную мощность. Реверсивный индуктивный датчик: О 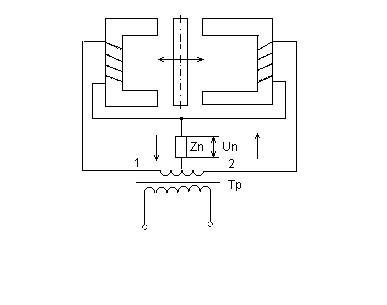 н обладает в 2 раза большей чувствительностью, чем реверсивный. Включается по дифференционной или мостовой схеме. Измеряет величину дефектов в сторону уменьшения и в сторону увеличения. В среднем положении якоря выходное напряжение датчика равно нулю. н обладает в 2 раза большей чувствительностью, чем реверсивный. Включается по дифференционной или мостовой схеме. Измеряет величину дефектов в сторону уменьшения и в сторону увеличения. В среднем положении якоря выходное напряжение датчика равно нулю.I1 I2 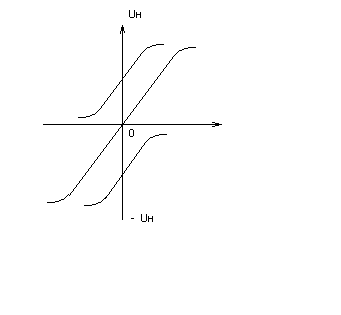 U  Дифференционная схема. -   Реверсивно-индуктивный датчик является дифференционным датчиком. Принцип действия основан на вычитании токов, протекающих по полуобмоткам датчика, на сопротивление приемника, и выделение результирующего тока, создающего результирующие выходное напряжение датчика. Если контролируемая деталь соответствует номинальному размеру, то якорь датчика находится в среднем положении (когда зазоры и одинаковы). В этом случае по полуобмоткам будут протекать токи по цепи: по левой – вывод «1» трансформатора, полуобмотка, сопротивление приемника, средняя точка трансформатора; по правой – средняя точка трансформатора, сопротивление приемника, правая полуобмотка точка «2» трансформатора. Каждый из этих токов, равных друг другу, создают равные, но противоположно направленные выходные напряжения, которые вычитают друг друга, и результирующее напряжение равно нулю.Допустим, контролирующая деталь имеет размеры больше номинального. При этом зазор увеличивается, а соответственно уменьшается. При увеличении зазора в первом сердечнике увеличивается линейный поток, происходит насыщение сердечника, и уменьшается магнитная проницаемость. Индуктивность левой катушки уменьшится, индуктивные сопротивления также уменьшатся, и увеличится ток левой полуобмотки, которая создаст более высокое выходное напряжение на сопротивлении приемника. В правом сердечнике, наоборот, зазор уменьшится, магнитное поле уменьшится. При этом индуктивность правой полуобмотки увеличится, её индуктивное сопротивление также увеличится, ток в правой полуобмотке уменьшится и создаст меньшее выходное напряжение, обратное по знаку.Результирующее напряжение датчика возрастет в положительном направлении в соответствии со статической характеристикой. При поступления детали с размерами меньше номинальных процесс повторится, только выходное напряжение возрастет обратного направления. Емкостные датчики. Емкостные датчики являются датчиками реактивного сопротивления и представляют собой конденсатор переменной емкости, подвижная часть которого связана с контролируемыми деталями с каким-то уровнем. П 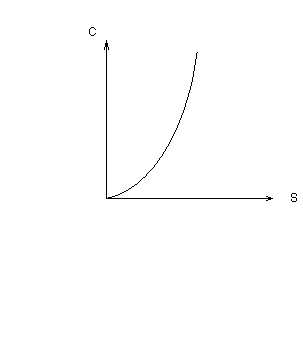 ринцип действия основан на изменении тока в эл.цепи в зависимости от емкостного сопротивления ринцип действия основан на изменении тока в эл.цепи в зависимости от емкостного сопротивления  , которое зависит от , которое зависит от  Если контролируемая деталь приводит в движение подвижные пластины конденсатора, изменяя таким образом площадь перекрытия, то это ведет к изменению емкости, емкостного сопротивления и тока, протекающего в цепи, что будет сигнализировать о дефектах детали. Для измерения уровней жидкостей в качестве параметра, изменяющего емкость, может быть использована диэлектрическая проницаемость диэлектрика между пластинами, может быть использован конденсатор с различными диэлектриками между пластинами. 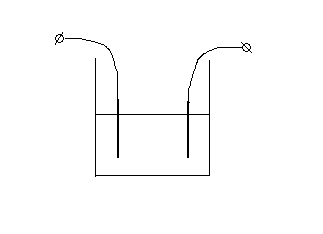  Генераторные датчики: К ним относятся термоэлектрические, пьезоэлектрические, тахогенераторные датчики. Термоэлектрическим называется датчик, в котором изменение температуры преобразуется в термо э.д.с. П 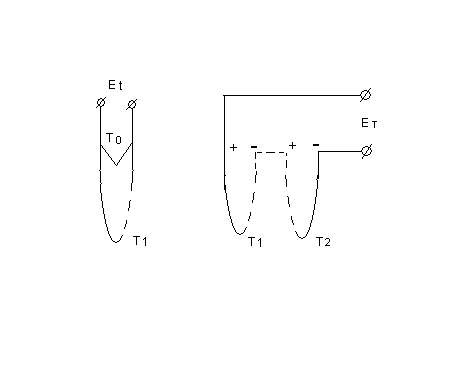 ринцип действия заключатся в том, что если 2 разнородных сплава или металла (медь и золото), соединить вместе общим спаем, и этот спай поместить в пространство с более высокой температурой, то между свободными концами этих проводников возникает термо э.д.с., величина, которой будет пропорциональна разности температур между нагретым объемом и объемом, где находятся выводы. В качестве проводников используются пары: платина и платинородий, хромель и алюмель, нихром и константан, а также платина, золото и другие чистые металлы. ринцип действия заключатся в том, что если 2 разнородных сплава или металла (медь и золото), соединить вместе общим спаем, и этот спай поместить в пространство с более высокой температурой, то между свободными концами этих проводников возникает термо э.д.с., величина, которой будет пропорциональна разности температур между нагретым объемом и объемом, где находятся выводы. В качестве проводников используются пары: платина и платинородий, хромель и алюмель, нихром и константан, а также платина, золото и другие чистые металлы.Термопары применяются для контроля за рабочей температурой в эл. И др. печах, применяющихся для плавки металлов и их закалки. Усилители. Усилителем называется устройство, применяемое для усиления входных сигналов. Бывают: электрические и неэлектрические. К электрическим относятся: 1. электрические усилители в состав входят полупроводниковые электронные приборы. 2. магнитные усилители, принцип действия которых основан на изменении магнитной проницаемости ферромагнитного сердечника, который приводит к изменению величины полного сопротивления рабочей обмотки усилителя. 3. комбинированные усилители, представляющие собой усилители, в состав которых входят каскады, собранные по электронным схемам по схеме магнитного усилителя. 4. неэлектрические усилители – к ним относятся пневматические и гидравлические усилители, нашедшие широкое применение во взрыво- пожароопасных производствах(нефтеперегонные заводы, химические производства, рудники, шахты). Основные параметры усилителей: коэффициент усиления по напряжению, току и мощности (определение в разах и децибелах); входное сопротивление усилителя; чувствительность; полоса пропускания усилителя; динамический диапазон; КПД. Магнитные усилители. Магнитным усилителем называется электромагнитное устройство, предназначенное для усиления электрических сигналов, в котором используются зависимость магнитной проницаемости ферромагнитных материалов на переменном токе от величины постоянного подмагничивающего поля, созданного или изменяемого входным сигналом. Магнитные усилители являются усилителями переменного тока, а управляются сигналом постоянного тока. Основные преимущества: Высокая надежность. Высокий КПД. Высокая чувствительность. Недостатки: Большая инерционность. Принцип действия основан на использовании явления насыщения ферромагнитного сердечника магнитного поля.  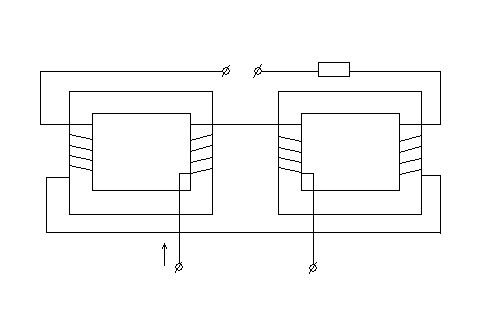 Wp Wy Wp Iy U – При подаче переменного напряжения питания по обоим полуобмоткам рабочей обмотки будет протекать ток, вызывающий магнитное поле в каждом сердечнике, а также степень его намагниченности , которая будет определять величину магнитной проницаемости сердечника. Индуктивность дросселя (1 и 2 полуобмотки) определяется по формуле: Lдр=  Где - число витков, - сечение сердечника, - магнитная проницаемость, - сечение сердечника, - магнитная проницаемость, - длина средней силовой линии. - длина средней силовой линии.Индуктивное сопротивление дросселя: т.к индуктивность дросселя зависит от магнитной проницаемости, то в ненасыщенном состоянии сердечник будет обладать большой магнитной проницаемостью, следовательно индуктивность дросселя будет большая, а также индуктивное сопротивление будет большое, что вызовет в рабочей обмотке протекание малого начального тока. При подаче на управляющую обмотку напряжения управления, которое вызовет управляющий ток в обмотке управления и вызывающее общее магнитное поле обоих сердечников, причем в правом сердечнике оно противоположно вектору поля рабочей обмотки, а в левом совпадает с ним, что приводит к насыщению левого сердечника, а следовательно к резкому падению магнитной проницаемости в нем, индуктивности обмотки и индуктивного сопротивления. Ток в рабочей обмотке увеличивается и определяется как отношение приложенного напряжения к полному сопротивлению дросселя и приемника и численно будет равен:   При смене полярности управляющего напряжения направление вектора магнитного поля управляющей обмотки изменяется на противоположное. При этом будет насыщаться правый сердечник. Усиление усилителя будет происходить за счет уменьшения сопротивления обмотки правого сердечника. Статическая характеристика будет проходить во втором квадрате при отрицательных токах управления симметрично характеристике в первом квадрате. Усилители широко применяются как усилители высокой чувствительности малой и средней мощности в системах автоматического управления и регулирования. 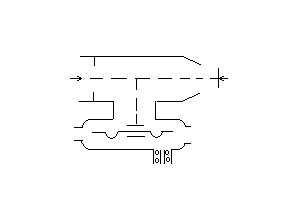 Неэлектрические усилители. Неэлектрические усилители.1. Пневматические усилители: 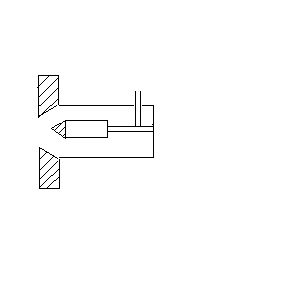 Гидравлический усилитель. Пневматический применяется в автомобильном, пассажирском транспорте, а также по взрыво- и пожароопасных производствах (типа сопло-заслонка) Состоит из входной и рабочей камеры, заслонки, мембраны связанной со штоком. Входной сигнал подается на заслонку. Если он отсутствует, то воздух через входную камеру проходит через сопло наружу. Если на заслонку подать входной сигнал, заслонка будет прикрывать сопло, давление во входной камере будет возрастать, что вызовет увеличение давления в рабочей камере, которое будет воздействовать на мембрану значительно большей площади чем сечение входной камеры, что вызовет увеличение давления на шток во столько раз, во сколько площадь мембраны больше сечения входной камеры. Шток будет двигаться вниз. Гидравлический усилитель со встроенной трубкой. Основные параметры: Коэффициент усиления: показывает, во сколько раз U(I,R) сигнала на выходе больше, чем на входе. KДб=20Lg Uвых/Uвх= 20 LgK K= Uвых/Uвх KpДб= 10Lg Pвых/Pвх 2. Входное сопротивление усилителя Rвх=Uвых/Iвх Выходное сопротивление определяют между выходными зажимами при отключенном сопротивлении нагрузки 3. Чувствительность. 4. Полоса пропускания – наз. На обм. Частот, в которой коэф. Усиления изменяется не больше, чем это допустимо по тех.условиям. 5. Динамический диапазон – отношение амплитуд наиболее сильного и наиболее слабого сигналов на входе усилителя D = 20Lg Uвх max/Uвх min 6. КПД  = Pвых/ = Pвых/  % % , потребляемая усилителем от всех источников питания , потребляемая усилителем от всех источников питанияСтабилизаторы напряжения: Стабилизатором называется устройство, автоматически поддерживающее значение выходной величины (напряжения, тока, давления, усилия) с заданной степенью точности. Классификация: 1.злектрические 2.неэлектрические К электрическим относятся: электрические стабилизаторы, ферромагнитные стабилизаторы и феррорезонансные. К неэлектрическим относятся стабилизаторы гидравлические и пневматические. По принципу действия все стабилизаторы делятся на 2 класса: 1. Параматрические стабилизаторы, принцип действия которых основан на изменении одного из параметров цепи. Например, нелинейного изменения сопротивления эл.цепи. Параметрические стабилизаторы: 1.Стабилизаторы на стабилитронах 2.Ферромагнитные 3.феррорезонансные К параметрическим относятся и неэлектрические. Изменяемый параметр – давление. 2.Компенсационные стабилизаторы – это электронные стабилизаторы, представляющие собой систему автоматического регулирования, поддерживающую на выходе схемы постоянными с заданной степенью точности напряжение или ток в приемнике. Основным параметром стабилизаторов является коэффициент стабилизации, который определяется как отношение относительного приращения входного напряжения к относительному приращению выходного напряжения.  Требования, предъявляемые к источникам напряжения, питающего различные виды электронной аппаратуры: 1.Бытовая аппаратура должна питаться от источников питающего напряжения с коэффициентом стабилизации 200-300. 2. Системы автоматики должны питаться напряжением с коэффициентом стабилизации 2000-3000 3. Системы эл/выч. Техники – Кст – более 5000. 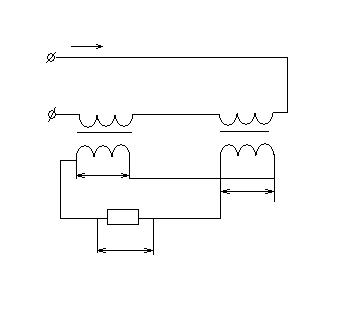 Ферромагнитный стабилизатор напряжения Ферромагнитный стабилизатор напряжения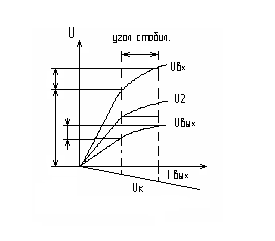 Iвх IвхUвх    Ферромагнитным называется стабилизатор, принцип действия которого основан на уменьшении магнитной проницаемости одного из трансформаторов и соответственно нелинейного изменения индуктивного сопротивления его вторичной обмотки (в зависимости от величины входного сигнала). Включает в себя 2 трансформатора Т1 и Т2, сопротивление приемника. Трансформатор Т1 насыщен и изменяет индуктивное сопротивление вторичной обмотки в зависимости от входного напряжения(при увеличении Uвх). Т2 является ненасыщенным, изменение входного напряжения на нем вызывает линейное изменение выходного напряжения и называется компенсационным, потому что его вторичная обмотка включена встречно вторичной обмотке насыщенного трансформатора. Работа стабилизатора: при увеличении входного напряжения на первичных обмотках возрастает входной ток, примерно пропорционально увеличению напряжения. На компенсационной обмотке пропорционально росту напряжения возрастает ток. На вторичной обмотке насыщенного трансформатора: напряжение вторичной обмотки и напряжение компенсационного трансформатора, вычитаясь друг из друга образуют выходное напряжение стабилизатора: Uвых = U2 – Uк Компенсационный стабилизатор напряжения. Назначение элементов: RБ – балансный резистор ограничивает ток через стабилитрон. Rк – резистор цепи коллектора усилителя постоянного тока VT2 Стабилитрон служит для выработки эталонного напряжения, нелинейно изменяет свое сопротивление при изменении входного напряжения. VT1 – регулируемый транзистор изменяет свое внутреннее сопротивление в зависимости от степени открытия и регулирует величину выходного напряжения Делитель R1 – R2 – R3 служит для снятия выходного напряжения и подачи его с помощью потенциометра R2 на базу VT2 Переход Э-Б VT2 является сравнивающим устройством. Переход Б-К VT2 является усилителем постоянного тока и исполнительным устройством. Датчиком является движок потенциометра. Задающее устройство – стабилитрон. Регулирующий орган – VT1 Допустим, на входе схемы присутствует номинальное напряжение и соответственно на выходе вырабатывается стабилизированное выходное напряжение. При этом стабилитрон пробит, транзистор VT2 приоткрыт, VT1 полностью открыт, и это обеспечивает стабильное напряжение на выходе. Допустим, напряжение на выходе возросло, оно мгновенно выросло и на выходе – положительный потенциал делится, подаваемый на Б VT2 пропорционально увеличился, а напряжение стабилитрона подводимое к Э, осталось прежним, т.к. стабилитрон пробился и напряжение на нем не изменилось. VT2 резко откроется, ток К возрастет, на Rк увеличится падение напряжения, отрицательная полярность которого подводится к Б VT1. VT1 призакроется, его R внутр. Увеличится и соответственно падение напряжения равно на столько, на сколько на сколько увеличилось Uвых. Uвх осталось прежним Стабилизатор давления Служит для поддержания постоянства давления газа или жидкости. Жидкость(воздух) от магистрали, питаемой компрессором или насосом, поступает в полость 1, через зазор между корпусом 2 и клапаном 8, рабочий агент попадает в полость 7, из которой подается к пневматическому или гидравлическому усилителю и исполнительному двигателю. Если давление в выходной магистрали понизится, то понизится давление в полости 7, перенесет поршень 3 вниз и увеличит зазор клапана. Уменьшается потеря давления в зазоре клапана, а давление в полости 7 будет расти. При повышении давления зазор клапана уменьшится. С помощью регулировочного винта 5 и шайбы 6 можно изменить натяжение пружины 4 и тем самым устанавливать требуемое значение стабилизированного давления Р. 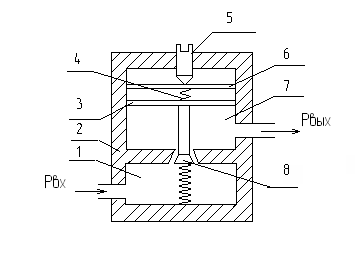 Ф 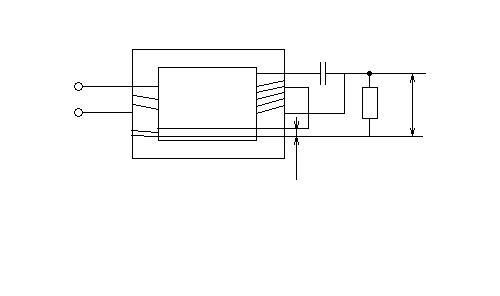 еррорезонансный стабилизатор. еррорезонансный стабилизатор.С Uвх  Zn Uвых Zn UвыхUк Схема 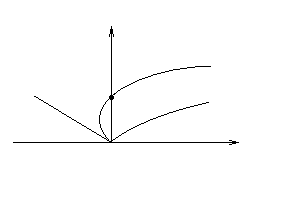 Uвых= f(Ic + IL2) Uc UL2 Ic IL2 Вольтамперная характеристика Напряжение Uк направлено навстречу напряжению Uвых. Емкость конденсатора С выбирают из условия  , откуда , откуда  где ω = 2¶f – угловая частота, L2 - индуктивность вторичной обмотки. Нелинейность ВАХ Uвых =f( Ic + IL2 ) более резкая, чем нелинейность характеристики одной индуктивности. Это улучшает стабилизацию. Включение компенсационной обмотки повышает коэффициент стабилизации. Небольшое напряжение Uk , создаваемое этой обмоткой, изменяется пропорционально входному напряжению Uвх. Если Uвх увеличится, то несколько увеличится Uвых , но при этом увеличится и напряжение компенсации Uк , и увеличение Uвых в значительной мере компенсируется. Феррорезонансные стабилизаторы имеют малую инертность, высокую надёжность и долгий срок службы. Работают в сетях со стабильной частотой. Переключающие устройства. Переключающим устройством называется устройство, предназначенное для коммутации Эл. Цепей постоянного и переменного тока малой, средней и большой мощности. Классификация: 1.Реле постоянного и переменного тока. 2.Контакторы. 3.Магнитные пускатели. 4.Бесконтактные переключающие устройства. 5.Электронно-контактные реле. 6.Распределители. Электрические реле. 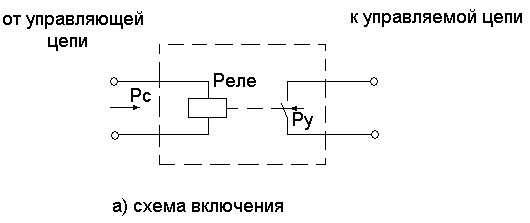 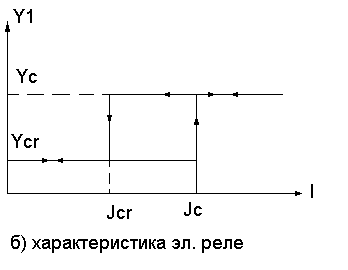 Реле состоит из двух частей: управляющей цепи и исполнительной цепи. При увеличении входного воздействия тока или напряжения на управляющую цепь – управляющая цепь будет срабатывать только при определённых управляющих воздействиях: при х = хс , y = yc , скачком изменит своё состояние управляющая цепь. При этом y становится равным ус. При дальнейшем увеличении х состояние управляющей цепи не изменится. При уменьшении входной величины х состояние управляемой цепи некоторое время будет оставаться без изменения, т.е. если х < хс , у = ус , и только лишь когда х = хотп – величина отпускания, то у станет равным уотп . Параметры реле: Напряжение, ток и мощность срабатывания реле – это эл. Величины, обеспечивающие надёжное срабатывание реле. Мощность управляющей цепи – это мощность, которая может быть передана через контакты реле. Время срабатывания реле – это время между моментами подачи управляющего сигнала до воздействия контактов. Нейтральные реле постоянного тока. Поляризационные реле. Реле с короткозамкнутым витком.  Контакторы. Контактором называется силовое эл. Магн. Реле, имеющее мощную контактную систему, предназначенную для коммутации рабочих цепей электродвигателя. 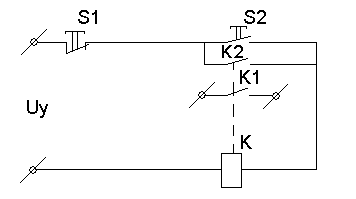 Магнитный пускатель. Магнитный пускатель предназначен для дистанционного управления работой 3-х фазных асинхронных электродвигателей и представляет собой контактор с мощными контактными группами. Бывают реверсивные и нереверсивные. В магнитный пускатель включаются одно – два тепловых реле для защиты электродвигателя от перегрева, а также имеются предохранители для защиты от К.З. Нереверсивный пускатель имеет один контактор, реверсивный – два. Силовая часть магнитного пускателя включает в себя эл. Двигатель, 2 тепловых реле, 2 группы рабочих контактов, предохранители. Управляющая цепь – кнопка «стоп», кнопка «пуск» КВ, катушка реле рабочих контактов и нормально замкнутого контакта КВ, кнопка «пуск2» КН, катушка реле рабочих контактов КМ2, блок-контакт этого реле и нормально замкнутый контакт теплового реле. 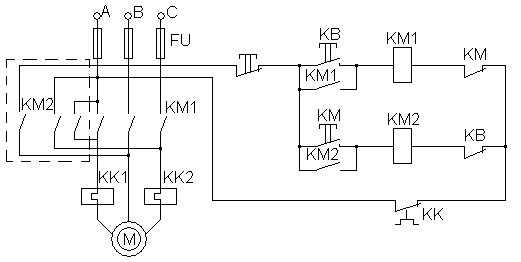 Работа: при нажатии кнопки «пуск1 » КВ запитывается катушка конденсатора 1 КМ. Питание проходит через нормально замкнутый контакт контактора 2, через тепловое реле КК на фазу А. Катушка контактора КМ1 намагничивается и приводит к замыканию рабочих контактов двигателя КМ1, блок – контакта кнопки «пуск» КМ1 и размыканию контакта КВ. Кнопка «пуск» отпускается, питание проходит с фазы С на А. Для того, чтобы перевести движение двигателя в обратную сторону, нажимается кнопка «стоп», двигатель останавливается, нажимается кнопка «пуск2» КН. При этом питание пойдёт от фазы С через кнопку «стоп», кнопку КН, катушка КМ2, контакт КВ контактора 1, контакт теплового реле, фаза А. При этом сработает блок – контакт КМ2 и разомкнётся контакт КН, включится 2-я группа рабочих контактов КН2, двигатель начнёт вращаться в обратную сторону. Электронно – контактные реле. 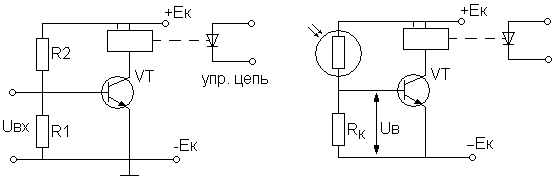 Бесконтактные переключающие устройства. 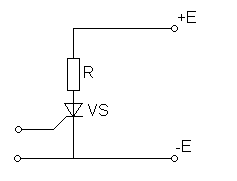 Распределители. Распределителями называются устройства, автоматически подключающие по заданному закону или по программе различные источники информации к одному потребителю. Бывают: Электронно-лучевые. Электронно-цифровые, которые также в соответствии с заданным входным кодом преобразуют сигналы.  Электронно-лучевой распределитель. Электронно-лучевой распределитель представляет собой ЭЛТ, на экране которой установлены контакты переключающих цепей. Переключение происходит электронным лучом трубки. Эл. Луч с помощью отклоняющей системы или в каком-то другом порядке попадает на контакты переключающих цепей и подключает источник информации к потребителю, который снимает заданную информацию, после чего подключается следующий источник. Электронно-цифровой распределитель. 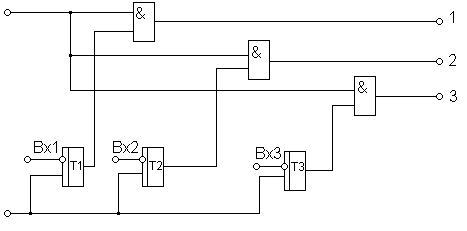 Схема состоит из 3-х триггеров, к которым подключаются источники входной информации. Триггеры подключены к шине установки нуля вторым входами. Три конъюнктора, на которые подводятся прямые выходы триггеров. Ко вторым входам контакторов подводятся шины считывания. Работа схемы: допустим, что на входы триггеров поступил код 001. При этом первый триггер опрокинется в единичное состояние, и на его прямом выходе будет присутствовать сигнал логической единицы, который поступит на первый вход первого конъюнктора. На Т2 и Т3 поступят сигналы логического нуля. Т2 и Т3 остаются в нулевом состоянии. Из их прямых выходов снимаются сигналы логического нуля, поступающие соответственно на 2 и 3 конъюнкторы. При поступлении команды считывания на первый конъюнктор одновременно поступает два сигнала, а на второй и третий только один. На первом выходе будет сигнал логической единицы, а на втором и третьем выходах – сигнал логического нуля. Т.О. информация 1-го источника будет подключена к потребителю, а 2-го и 3-го подключена не будет. Электронно-цифровые распределители обладают более высоким быстродействием, безинерционностью, но у них более сложная схема. Основные понятия об исполнительных устройствах. Исполнительные устройства – это устройства, предназначенные для непосредственного воздействия на управляющий объект с целью осуществления функции автоматического управления или автоматического регулирования. Разделяются на: Электрические. Электронные. Электромагнитные. Неэлектрические, пневматические и гидравлические. К неэлектрическим относятся: электромагнитные и электродвигательные ИУ, которые преобразуют энергию эл. Тока в механическую энергию с целью воздействия на объект управления или на его органы (шток, поршень, и др.). 1 2 |