Электр маш конспект. Трансформаторы основные теоретические сведения
 Скачать 0.96 Mb. Скачать 0.96 Mb.
|

|
6. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА 6.1. Общие положения Двигатели постоянного тока преобразуют электрическую энергию постоянного тока в механическую. Несмотря на успехи в создании статических полупроводниковых преобразователей и внедрение регулируемых электроприводов переменного тока, производство двигателей постоянного тока в процентном отношении к двигателям переменного тока не сокращается, и они находят новые области применения. Двигатели постоянного тока допускают плавное и экономичное регулирование скорости вращения. Это преимущество перед двигателями переменного тока обеспечивает применение двигателей постоянного тока в электроприводах с широким диапазоном изменения скорости вращения. Двигатели постоянного тока находят применение в приводах прокатных станов, станков, на транспорте и в других системах автоматизированного электропривода. По способу возбуждения двигатели постоянного тока, так же как и генераторы, делятся на двигатели независимого, параллельного, последовательного и смешанного возбуждения. Двигатели независимого возбуждения могут быть разделены на двигатели с электромагнитным возбуждением, когда обмотка возбуждения подключена к постороннему источнику постоянного тока или на зажимы двигателя, и на двигатели с магнитоэлектрическим возбуждением, когда вместо обмотки возбуждения используются постоянные магниты. Двигатель постоянного тока потребляет электрическую мощность P1 из сети. Часть этой мощности расходуется на электрические потери в обмотке возбуждения Рв , электрические потери в обмотке якоря Рэа и электрические потери в контакте щеток Рэщ, а остальная ее часть передается магнитным полем к якорю. Эта мощность называется электромагнитной.  (6.1) (6.1)Электромагнитная мощность РЭМ расходуется на покрытие потерь в стали магнитопровода якоря РМ , механических РМХ и добавочных Рд потерь. Оставшаяся ее часть Р2 является полезной механической мощностью на валу двигателя.  (6.2) (6.2)где:  (6.3) (6.3)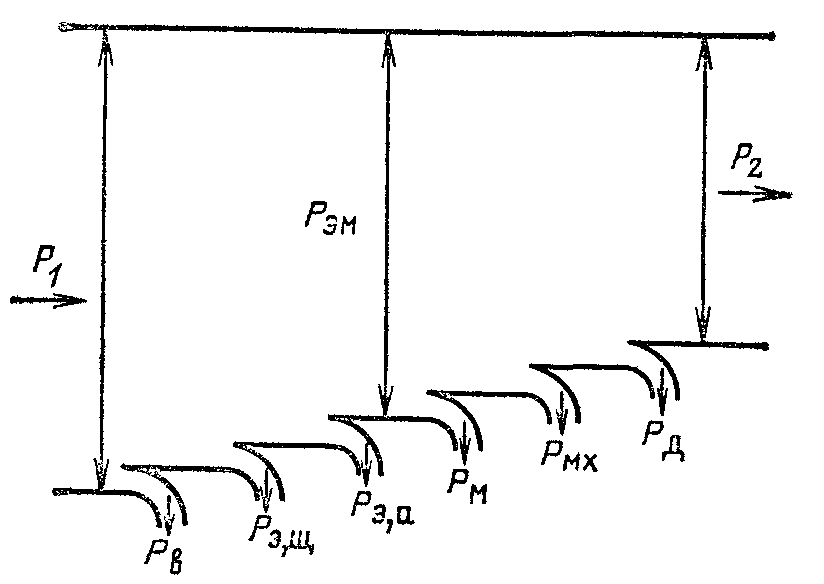 Рисунок 6.1 - Энергетическая диаграмма двигателя постоянного тока Различают два вида потерь — основные и добавочные. Основные потери разделяются на магнитные, механические и электрические. Магнитные потери  происходят только в сердечнике якоря, так как только этот элемент магнитопровода машины постоянного тока подвергается перемагничиванию. Величина магнитных потерь состоит из потерь от гистерезиса и потерь от вихревых токов и зависит от частоты перемагничивания происходят только в сердечнике якоря, так как только этот элемент магнитопровода машины постоянного тока подвергается перемагничиванию. Величина магнитных потерь состоит из потерь от гистерезиса и потерь от вихревых токов и зависит от частоты перемагничивания  , значений магнитной индукции в зубцах и спинке якоря, толщины листов электротехнической стали, ее магнитных свойств и качества изоляции этих листов в пакете якоря. , значений магнитной индукции в зубцах и спинке якоря, толщины листов электротехнической стали, ее магнитных свойств и качества изоляции этих листов в пакете якоря.Механические потери обусловлены потерями на вентиляцию, трением вращающихся частей машины — трением в подшипниках, трением щеток о коллектор. Величина механических потерь зависит от скорости вращения якоря. Магнитные и механические потери называют постоянными потерями, так как мощность этих потерь не зависит от нагрузки машины. Аналитический расчет магнитных и механических потерь — сложная задача и не дает достаточной точности. Для определения этих потерь иногда пользуются экспериментальным методом. 6.2. Опыт холостого хода Данный опыт даёт возможность изучить свойства магнитной цепи машины, определить возникающие при холостом ходе потери и механические свойства двигателя при питании от источника регулируемого напряжения. Включают машину на холостом ходу в двигательный режим. При этом измеряют ток якоря Ia0 в режиме холостого хода и подведенное напряжение U0 и определяют мощность холостого хода Р0 в цепи якоря (Вт), которая представляет собой сумму магнитных и механических потерь:  (6.4) (6.4)Потери в цепи возбуждения определяются потерями в обмотке возбуждения и в реостате, включенном в цепь возбуждения:  (6.5) (6.5)Здесь Uв — напряжение цепи возбуждения. 6.3. Опыт короткого замыкания Данный опыт даёт возможность определить электрические потери возникающие в обмотках цепи якоря и в щеточном контакте машины постоянного тока при питании от источника регулируемого напряжения. Электрические потери в обмотках цепи якоря и в щеточном контакте машины постоянного тока называют переменными, так как их величина зависит от нагрузки машины и обусловлена нагревом обмоток и щеточного контакта. Потери в цепи якоря определяются по формуле:  (6.6) (6.6)где  - сопротивление цепи якоря, приведенное к расчетной рабочей температуре. - сопротивление цепи якоря, приведенное к расчетной рабочей температуре. , (6.7) , (6.7)где r/ — активное сопротивление при температуре Т1; Т2– рабочая температура двигателя; α = 0,004 – температурный коэффициент меди. Электрические потери в контакте щеток:  (6.8) (6.8)где  — переходное падение напряжения на щетках, принимаемое в соответствии с маркой щеток. — переходное падение напряжения на щетках, принимаемое в соответствии с маркой щеток.6.4. Коэффициент полезного действия В машинах постоянного тока имеется ряд трудно учитываемых потерь — добавочных. Поэтому, согласно ГОСТ, для двигателей без компенсационной обмотки значение добавочных потерь Рд принимают равным 1% от подводимой мощности. В машинах с компенсационной обмоткой значение добавочных потерь принимают равным 0,5%. Мощность (Вт) для двигателя постоянного тока (электрическая мощность или подводимая мощность):  (6.9) (6.9)Коэффициент полезного действия электрической машины представляет собой отношение мощностей отдаваемой (полезной) к подводимой (потребляемой):  (6.10) (6.10)Обычно КПД машин постоянного тока составляет 0,75—0,9 для машин мощностью от 1 до 100кВт и 0,9—0,97 для машин мощностью свыше 100кВт. У машин постоянного тока малой мощности КПД намного меньше. Коэффициент полезного действия электрической машины можно определять: а) методом непосредственной нагрузки по результатам измерений подведенной P1 и отдаваемой P2 мощностей; б) косвенным методом по результатам измерений потерь. Метод непосредственной нагрузки применим только для машин малой мощности, для остальных случаев применяется косвенный метод, как более точный и удобный. 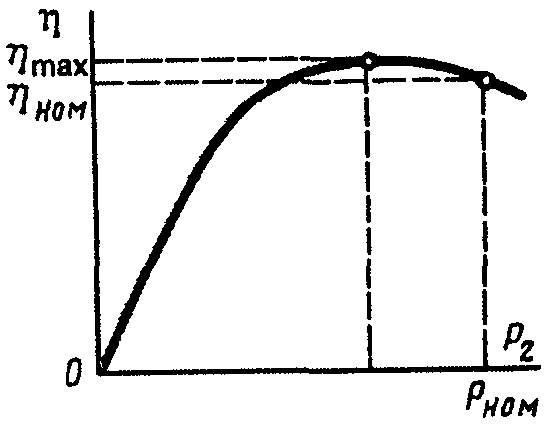 Рисунок 6.2 – Зависимость η=f(Р2) Существует несколько косвенных способов определения КПД. Наиболее прост способ холостого хода двигателя, когда потребляемая машиной постоянного тока мощность затрачивается только на потери холостого хода. Что же касается электрических потерь, то их определяют расчетным путем после предварительного измерения электрических сопротивлений обмоток и приведения их к рабочей температуре. 6.5. Принцип действия двигателя постоянного тока Электрические машины обладают свойством обратимости, т. е. они могут работать как в режиме генератора, так и в режиме двигателя. Поэтому если машину постоянного тока подключить к источнику энергии постоянного тока, то в обмотке возбуждения и в обмотке якоря машины появятся токи. Взаимодействие тока якоря с полем возбуждения создает на якоре вращающий электромагнитный момент Мэм.  (6.11) (6.11)где ω – угловая частота вращения якоря (рад/с). Под действием электромагнитного момента якорь машины начнет вращаться, т. е. машина будет работать в режиме двигателя. В процессе работы двигателя его якорь вращается в магнитном поле. В обмотке якоря индуцируется ЭДС Еа , направление которой определяют по правилу «правой руки». В двигателе ЭДС направлена против тока Ia , и поэтому ее называют противо-ЭДС якоря. Для двигателя, работающего с постоянной частотой вращения, подведенное к двигателю напряжение уравновешивается противо-ЭДС обмотки якоря и падением напряжения в цепи якоря:  (6.12) (6.12)На основании (6.12) ток якоря определяется по формуле:  (6.13) (6.13)Умножив обе части уравнения (6.12) на ток якоря Ia, получим уравнение мощности для цепи якоря:  (6.14) (6.14)где  — электрическая мощность, подводимая к якорю; — электрическая мощность, подводимая к якорю; — мощность электрических потерь в цепи якоря. — мощность электрических потерь в цепи якоря. - электромагнитная мощность, представляющая собой полную электрическую мощность, которая преобразуется в полезную механическую мощность и расходуется на покрытие магнитных (потери в стали якоря), механических и добавочных потерь. - электромагнитная мощность, представляющая собой полную электрическую мощность, которая преобразуется в полезную механическую мощность и расходуется на покрытие магнитных (потери в стали якоря), механических и добавочных потерь.6.6. Пуск двигателя Ток якоря двигателя определяется формулой (6.13). Если принять U и  неизменными, то ток Iа зависит от противо-ЭДС Еа. неизменными, то ток Iа зависит от противо-ЭДС Еа. В начальный момент пуска якорь двигателя неподвижен (n=0) и в его обмотке не индуцируется ЭДС (Еа=0). Поэтому при непосредственном подключении двигателя к сети в обмотке его якоря возникает пусковой ток:  (12.15) (12.15)Обычно сопротивление ra невелико, поэтому значение пускового тока достигает недопустимо больших значений, в 10—20 раз превышающих номинальный ток двигателя. Такой большой пусковой ток весьма опасен для двигателя. Во-первых, он может вызвать в машине круговой огонь, а во-вторых, при таком токе в двигателе развивается чрезмерно большой пусковой момент, который оказывает ударное действие на вращающиеся части двигателя и может механически их разрушить. Этот ток вызывает резкое падение напряжения в сети, что неблагоприятно отражается на работе других потребителей, включенных в эту сеть. Поэтому пуск двигателя непосредственным подключением в сеть обычно применяют для двигателей мощностью не более 1,0 кВт. В этих двигателях благодаря повышенному сопротивлению обмотки якоря и небольшим вращающимся массам значение пускового тока лишь в 3—5 раз превышает номинальный, что не представляет опасности для двигателя. Что же касается двигателей большей мощности, то при их пуске для ограничения пускового тока используют пусковые реостаты, включаемые последовательно в цепь якоря (реостатный пуск). По мере разгона якоря двигателя ступени пускового реостата R плавно выводятся, и пуск двигателя заканчивается. Сопротивление пускового реостата R выбирают обычно таким, чтобы пусковой ток не превышал номинальный более чем в 2—3 раза. Для пуска двигателей большей мощности применять пусковые реостаты нецелесообразно, так как это вызывает значительные потери энергии. Кроме того, пусковые реостаты обладают большими массогабаритными показателями. Поэтому в двигателях большой мощности применяют пуск двигателя путем понижения напряжения. 6.7 Характеристики двигателей постоянного тока параллельного и независимого возбуждения Основными характеристиками, по которым оцениваются рабочие свойства двигателя, являются: 1) скоростная характеристика (электромеханическая)n=f(Ia) — зависимость скорости вращения якоря от тока якоря; 2) моментная характеристика Mэм=f(Ia) — зависимость электромагнитного момента от тока якоря; 3) механическая характеристика n=f(Mэм) — зависимость скорости вращения якоря от электромагнитного момента. При снятии характеристик нагрузочный момент изменяют от нуля до 1,1—1,2Мном. Номинальный момент Мном, Н·м, определяют по формуле:  , Н·м; (6.16) , Н·м; (6.16)где  - номинальная угловая частота вращения якоря определяется по формуле: - номинальная угловая частота вращения якоря определяется по формуле: , рад/сек. (6.17) , рад/сек. (6.17)ЭДС двигателя определяется по формуле:  (6.18) (6.18)Тогда скорость вращения якоря двигателя (об/мин):  (6.19) (6.19)Подставив значение Еа из (6.12), получим выражение скоростной характеристики:  (6.20) (6.20)т. е. скорость вращения якоря двигателя прямо пропорциональна напряжению и обратно пропорциональна магнитному потоку возбуждения. Если к валу машины не будет приложен нагрузочный момент (М2=0), то двигатель будет работать на холостом ходу, при этом ток в якоре Ia=I0, а скорость n=n0. Ток I0 — ток холостого хода — создает электромагнитный момент Мо, необходимый для преодоления существующего в самом двигателе тормозного момента, обусловленного силами трения и магнитными потерями. Этот ток относительно мал и составляет 2—5% от номинального. Работа двигателя при М=0 и Iа=0 называется идеальным холостым ходом. Согласно (6.20) скорость при идеальном холостом ходе равна:  , об/мин (6.21) , об/мин (6.21)Изменение скорости вращения двигателя при переходе от номинальной нагрузки к холостому ходу, выраженное в процентах, называют номинальным изменением скорости вращения якоря:  ,% (6.22) ,% (6.22)В двигателях параллельного и независимого возбуждения изменение скорости при переходе от холостого хода к номинальной нагрузке мало и составляет 2—5%. Такие слабо падающие скоростные и механические характеристики называются жесткими. Скоростную характеристику двигателя n=f(Ia) снимают при Iв=Iвном=const и U=Uном=const. Номинальный ток возбуждения Iвном устанавливают так, чтобы обеспечить номинальную скорость nном при Iа=Iаном и номинальном подведенном напряжении Uном . Скоростные характеристики показаны на рисунке6.3. Их анализ проведем, исходя из уравнения (6.20). 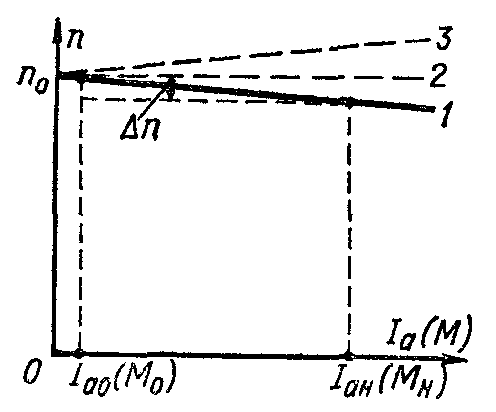 Рисунок 6.3 - Скоростные характеристики двигателя постоянного тока параллельного и независимого возбуждения При U=Uном=const на скорость якоря будут оказывать влияние два фактора: падение напряжения в цепи якоря и размагничивающее действие реакции якоря, уменьшающее поток. Поток двигателя при нагрузке  (6.23) (6.23)где Ф0 — поток, созданный током возбуждения;  — уменьшение потока из-за размагничивающего действия поперечной реакции якоря. — уменьшение потока из-за размагничивающего действия поперечной реакции якоря.Тогда при возрастании тока якоря падение напряжения  будет стремиться уменьшить скорость, а — увеличить. будет стремиться уменьшить скорость, а — увеличить.Вид скоростной характеристики зависит от того, какой из этих факторов будет действовать сильнее. При более сильном влиянии падения напряжения характеристика имеет падающий характер (сплошная линия на рисунке 6.3), а если будет преобладать действие реакции якоря, то она может иметь возрастающий характер (штриховые линии). Нормальная работа двигателя возможна только при падающей характеристике. Моментную характеристикудвигателя Mэм=f(Ia) снимаютпри Iв=const. Зависимость электромагнитного момента от тока якоря описывается уравнением:  (6.24) (6.24)Если бы при Iв=const поток Ф оставался постоянным, то момент был бы пропорционален току якоря Ia и моментная характеристика представляла бы прямую линию, выходящую из начала координат (штриховая прямая на рисунке 6.4). 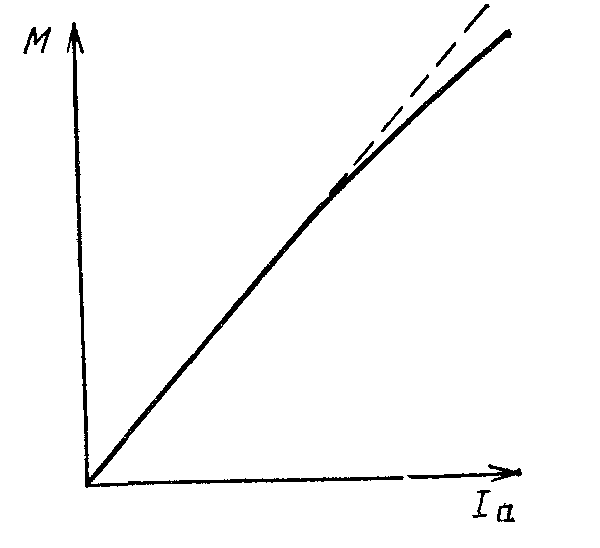 Рисунок 6.4 - Моментная характеристика двигателя постоянного тока независимого возбуждения Действительная характеристика из-за уменьшения потока вследствие размагничивающего действия реакции якоря пойдет ниже, и будет отклоняться от линейной зависимости (сплошная линия на рисунке 6.4). Однако расхождение между этими характеристиками невелико и во многих практических расчетах может не учитываться. Механическую характеристикудвигателя n=f(Mэм) снимают при Iв=const и U=Uном=const. Выразим ток Iа из выражения (12.24).  (6.25) (6.25)Подставив (6.25) в (6.20), получим аналитическое выражение механической характеристики:  (6.26) (6.26)Вид механической характеристики двигателя параллельного и независимого возбуждения такой же, как и у скоростной характеристики. Если принять пропорциональную зависимость между моментом и током якоря, то при одних и тех же значениях U и Iв скоростная характеристика в другом масштабе будет являться и механической характеристикой. Рабочие характеристики двигателя М, P1, Iа, n, η=f(P2) снимают при Iв=const и U=Uном=const. 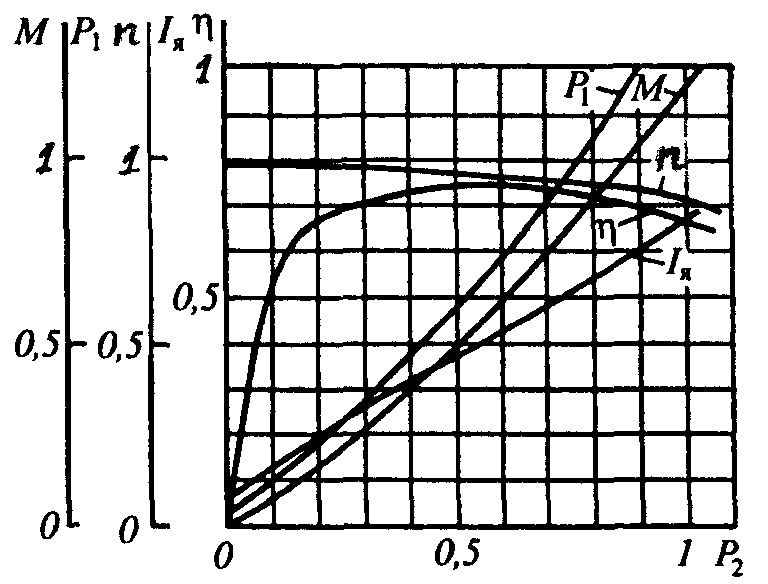 Рисунок 6.5 - Рабочие характеристики двигателя постоянного тока параллельного и независимого возбуждения С увеличением нагрузки на валу двигателя Р2 растет момент двигателя М, а скорость вращения n немного падает. Увеличение нагрузки приводит к росту мощности P1, забираемой из сети, и росту тока якоря Iа. При холостом ходе (Р2=0) КПД=О, затем с увеличением Р2 сначала КПД быстро растет, но в связи с большим ростом потерь в цепи якоря при больших нагрузках снова начинает уменьшаться. Направление вращения якоря зависит от направлений магнитного потока возбуждения Ф и тока в обмотке якоря. Поэтому, изменив направление какой-либо из указанных величин, можно изменить направление вращения якоря. 6.8. Устойчивость двигателя Важно, чтобы работа двигателя вместе с производственным механизмом протекала устойчиво. Под устойчивой работой двигателя понимается его способность вернуться в исходную точку равновесия после кратковременного действия возмущающих сил, нарушивших это равновесие. Оценку устойчивости производят из совместного рассмотрения механических характеристик двигателя и производственного механизма. 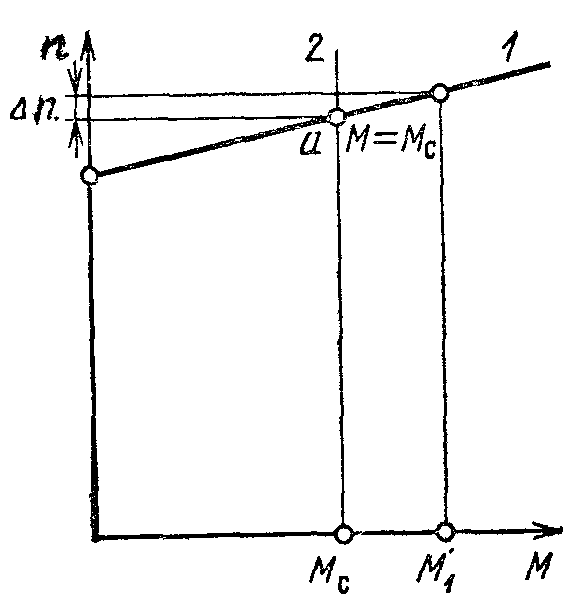 Рисунок 6.6 - К определению устойчивости работы двигателя совместно с механизмом Работа двигателя может быть устойчивой и неустойчивой. Неустойчивая работа будет наблюдаться при возрастающих механических характеристиках двигателя. На рисунке 6.6 показана такая характеристика двигателя (прямая 1). Там же дана механическая характеристика для механизма, приводимого во вращение двигателем (прямая 2). Для него принята зависимость Мс=М2=const, являющаяся типичной для целого ряда механизмов (подъемные краны, механизмы подачи для металлорежущих станков и т. д.). Пересечение этих прямых является точкой равновесия моментов М=Мс (точка а) и соответствует установившемуся режиму работы. Предположим, что в результате действия каких-либо возмущающих сил скорость увеличится на Δn. Тогда момент двигателя увеличится до М1 и возникнет положительный динамический момент, так как М1—Mc>0. Под действием избыточного момента двигателя скорость n начнет нарастать, разность М—Мс еще больше увеличится, что приведет к дальнейшему возрастанию скорости, и т. д. Если в результате возмущения скорость уменьшится, то М—Мс<0 и скорость будет непрерывно уменьшаться. Отсюда следует, что точка а является точкой неустойчивого равновесия и, следовательно, нормальная работа двигателя с возрастающей механической характеристикой невозможна. Аналогичным путем можно показать что при падающей механической характеристике работа будет проходить устойчиво, так как всякое отклонение скорости на ±Δn вызывает появление избыточного момента, направленного на восстановление равновесия. В общем виде критерием устойчивой работы является неравенство  (6.27) (6.27)Иногда при проектировании двигателей в целях уменьшения его размеров и массы принимают повышенные значения линейной нагрузки А и индукции в воздушном зазоре Вδ В таких двигателях сильно проявляется размагничивающее действие реакции якоря, и получить у них падающую механическую характеристику не удается. Тогда предусматривают специальную обмотку возбуждения (стабилизирующую обмотку), располагаемую на полюсах и включаемую последовательно с якорем. Она имеет всего несколько витков и предназначается для компенсации размагничивающего действия реакции якоря. При наличии такой обмотки поток машины практически не будет изменяться с ростом тока якоря — он будет стабилизирован. Механическая характеристика такой машины будет падающей. |