Электр маш конспект. Трансформаторы основные теоретические сведения
 Скачать 0.96 Mb. Скачать 0.96 Mb.
|

|
3.2.2. Характеристика короткого замыкания синхронного генератора Одной из важных характеристик синхронного генератора является характеристика короткого замыкания — зависимость тока статора от тока возбуждения Iк=f(If) при симметричном коротком замыкании на выводах статора при номинальной скорости вращения ротора. Зависимость тока короткого замыкания в обмотке статора от тока возбуждения снимается при постепенном повышении тока возбуждения. Ток статора изменяется от нуля до значения 1,25∙Iном. Эта зависимость линейная, так как генератор не насыщен. Индуктивный характер тока при коротком замыкании определяется индуктивным сопротивлением обмотки статора, которое значительно больше активного сопротивления обмотки (в относительных единицах R=0,01-0,001, а X=1,0-2,5). Ток короткого замыкания может быть определен как:  , А; (3.6) , А; (3.6)где E0— ЭДС, соответствующая току возбуждения If0, которая определяется по характеристике холостого хода. 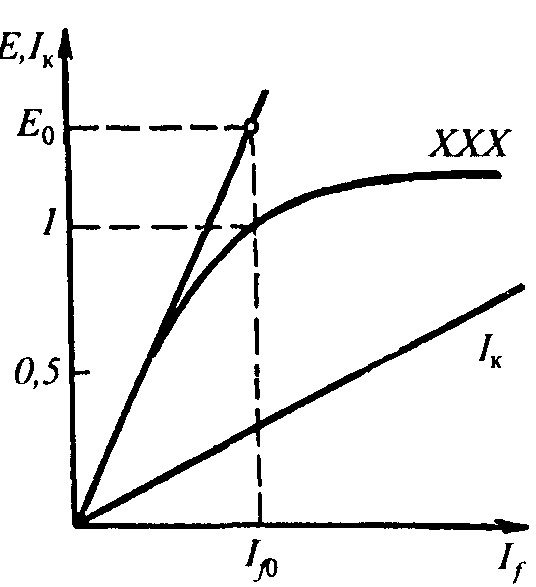 Рисунок 3.3 - Характеристики холостого хода и короткого замыкания Пренебрегая активным сопротивлением, ток короткого замыкания можно считать чисто индуктивным:  , А. (3.7) , А. (3.7)Таким образом, по характеристике холостого хода и характеристике короткого замыкания можно определить опытным путем значение индуктивного сопротивления обмотки статора Х:  (3.8) (3.8)Отношение короткого замыкания представляет собой отношение тока возбуждения соответствующего номинальному напряжению при холостом ходе, к току возбуждения соответствующему номинальному току статора при опыте короткого замыкания.  (3.9) (3.9)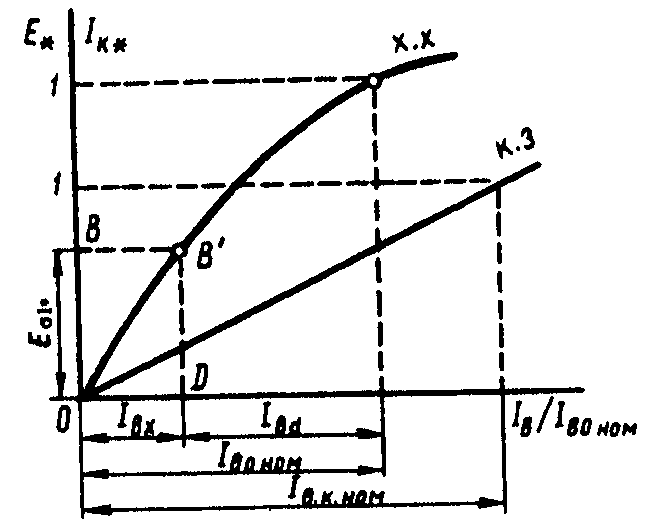 Рисунок 3.4 - Определение кратности тока короткого замыкания Характеристики холостого хода и короткого замыкания дают возможность определить значения токов возбуждения двух составляющих: одна компенсирует падения напряжения в цепи статора Iвх, а другая компенсирует размагничивающее влияние реакции статора Iвd. Отношение короткого замыкания, так же, как и индуктивное сопротивление обмотки статора Х определяет перегрузочную способность синхронной машины. Чем больше  , тем больше предельная нагрузка. тем больше, чем больше воздушный зазор, т.е. при той же мощности меньше концентрация энергии магнитного поля. Такие машины требуют больших вложений материалов, что увеличивает их стоимость. У турбогенераторов =0,4-1,0 , а гидрогенераторов =0,8-1,8. , тем больше предельная нагрузка. тем больше, чем больше воздушный зазор, т.е. при той же мощности меньше концентрация энергии магнитного поля. Такие машины требуют больших вложений материалов, что увеличивает их стоимость. У турбогенераторов =0,4-1,0 , а гидрогенераторов =0,8-1,8. (3.10) (3.10)Отношение короткого замыкания имеет большое практическое значение при оценке свойств синхронной машины. Машины с малым менее устойчивы при параллельной работе с сетью и имеют значительные колебания напряжения при изменениях нагрузки. Но такие машины имеют меньшие габариты и, следовательно, дешевле, чем машины с большим .3.3. Внешние характеристики синхронного генератора Внешними характеристиками синхронного генератора называются зависимости U=f(Ia) при n=const, cosφ=const, снятые при неизменном токе возбуждения If=const. На рисунке 7.5 показаны внешние характеристики синхронного генератора в относительных единицах при активной (R), индуктивной (L) и емкостной (С) нагрузках. При увеличении тока активной нагрузки Ia напряжение на выходе генератора уменьшается вследствие падения напряжения на внутреннем сопротивлении машины za=ra+jxσa, и влияния поперечной реакции статора. При индуктивной нагрузке за счет более сильного размагничивающего действия продольной реакции статора внешняя характеристика идет ниже внешней характеристики при активной нагрузке. При емкостной нагрузке реакция статора подмагничивающая, поэтому с ростом нагрузки растет напряжение на выводах генератора. 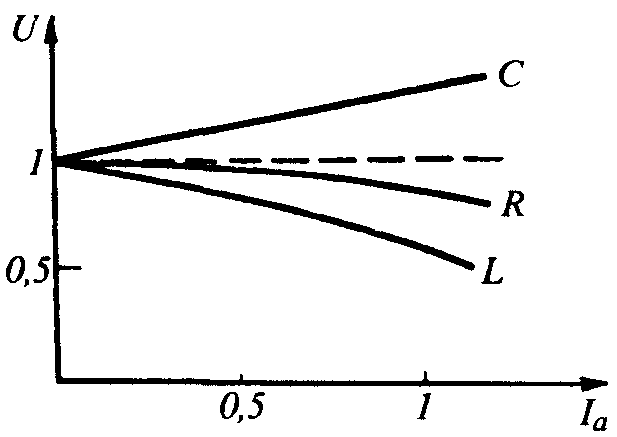 Рисунок 3.5 - Внешние характеристики синхронного генератора при разных видах нагрузки В процентном отношении внутреннее сопротивление машины по отношению к сопротивлению нагрузки обычно составляет небольшое значение, поэтому можно реакцию статора при активной нагрузке считать без учета индуктивного сопротивления рассеяния обмотки статора. В машинах небольшой мощности поперечная реакция статора (чисто активный ток) будет при наличии в нагрузке небольшой емкости, компенсирующей индуктивное сопротивление рассеяния обмотки статора машины. Номинальным изменением напряжения синхронного генератора ΔUном называется изменение напряжения при изменении нагрузки от нуля до номинальной при неизменном токе возбуждения. Номинальное изменение напряжения определяется по формуле:  , %. (3.11) , %. (3.11)3.4. Регулировочная характеристика синхронного генератора Регулировочная характеристика—это зависимость тока возбуждения от тока статора If=f(Ia) при постоянном напряженииU=const, постоянной скорости вращенияn=const и неизменном cosφ нагрузки. Регулировочные характеристики показывают, как нужно изменять ток возбуждения при изменении нагрузки, чтобы напряжение на выводах генератора оставалось постоянным (рисунок 3.6). 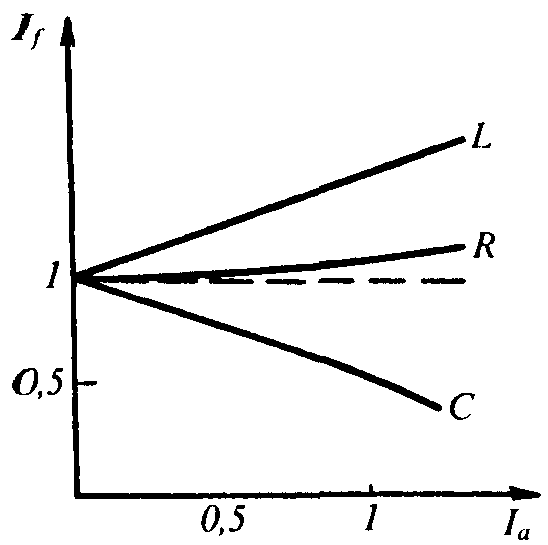 Рисунок 3.6 - Регулировочные характеристики синхронного генератора при разных видах нагрузки Регулировочные характеристики могут быть построены, если известны внешние характеристики. При увеличении нагрузки при индуктивной нагрузке напряжение уменьшается. Чтобы напряжение оставалось неизменным, надо увеличивать ток возбуждения. При емкостной нагрузке при увеличении тока в статоре машины напряжение на выводах генератора растет. Чтобы оно оставалось неизменным, надо уменьшать ток возбуждения. Так же, как и внешние характеристики, регулировочные характеристики при небольших нагрузках линейны. При нагрузках, близких к номинальному значению, из-за насыщения регулировочные характеристики становятся нелинейными. При работе синхронного генератора на емкостную нагрузку магнитное поле в машине создается током возбуждения и реактивными токами, протекающими в статоре. При небольших зазорах в синхронной машине, работающей на емкостную нагрузку, может наступить самовозбуждение, когда при отключенной обмотке возбуждения (If=0) на выводах генератора появится напряжение. Это явление называется самовозбуждением синхронной машины. 3.5. Нагрузочная характеристика синхронного генератора Нагрузочная характеристика — это зависимость напряжения на генераторе от тока возбуждения U=f(If) при постоянных значениях тока статораI=const, cosφ=const нагрузки и скорости вращения n=const (рисунок 3.7). При изменении напряжения ток в статоре поддерживается неизменным путем регулирования сопротивления нагрузки. Нагрузочные характеристики снимают только при индуктивной нагрузке. Поэтому и называют зависимость U=f(If) при cosφ=0=const индукционной нагрузочной характеристикой. Индукционная нагрузочная характеристика является вспомогательной характеристикой и используется для определения индуктивного сопротивления рассеяния. Для этого необходимо иметь характеристику холостого хода и индукционную нагрузочную характеристику, снятые опытным путем. Имея эти характеристики, можно построить реактивный треугольник АВС. В треугольнике АВС катет АВ равен падению напряжения в сопротивлении рассеяния статора (Iа∙Xσa), a горизонтальный катет ВС равен МДС реакции статора в масштабе тока возбуждения, в котором построены характеристика холостого хода и нагрузочная характеристика. Реактивный треугольник показывает, что уменьшение напряжения при снятии нагрузочной характеристики происходит вследствие падения напряжения на индуктивном сопротивлении рассеяния Хσа (катет АВ) и размагничивающего действия реакции статора (катет ВС). 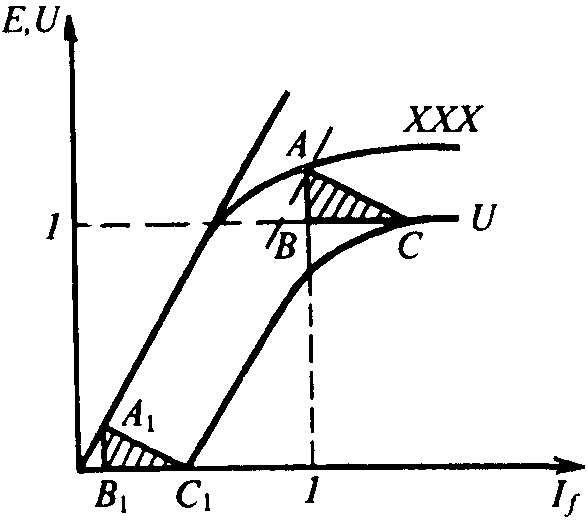 Рисунок 3.7 - Нагрузочная характеристика и реактивный треугольник Если известны катеты реактивного треугольника, то по характеристике холостого хода XXX можно построить нагрузочную характеристику, передвигая реактивный треугольник параллельно самому себе (треугольник А1В1С1). Если имеются снятые опытным путем XXX и нагрузочная характеристика, можно определить Хσа , зная продольную реакции статора (катет ВС в масштабе тока возбуждения).  (3.12) (3.12)Приближенно катеты реактивного треугольника определяются по спрямленной XXX так, как это показано на рисунке 3.7. Рассмотренные характеристики дают возможность судить об основных электромагнитных показателях машины. Однако о КПД и распределении тепловых полей по ним судить нельзя. 3.6 Потери и КПД синхронного генератора Преобразование энергии в синхронном генераторе происходит следующим образом. К валу синхронного генератора от первичного двигателя подводится механическая мощность P1. Часть этой мощности расходуется на механические потери РМЕХ в генераторе, на магнитные потери в стали статора РСТ, добавочные потери в стали статора и ротора РДОБ. Остальная часть мощности преобразуется в электрическую мощность и передается магнитным полем в статор. Полная электрическая мощность, получаемая в результате преобразования механической мощности, называется электромагнитной мощностью. Магнитные потери в сердечнике статора у генератора покрываются непосредственно за счет механической мощности со стороны вала и в электромагнитную мощность не входят. Электромагнитная мощность трехфазного синхронного генератора равна:  , Вт (3.13) , Вт (3.13)Преобразование энергии в синхронном генераторе связано с потерями энергии. Все виды потерь в синхронной машине разделяются на основные и добавочные. Основные потери в синхронном генераторе слагаются из электрических потерь в обмотке статора, потерь на возбуждение, магнитных потерь и механических потерь. Электрические потери в обмотке статора:  , Вт (3.14) , Вт (3.14)где  — активное сопротивление одной фазы обмотки статора при расчетной рабочей температуре: — активное сопротивление одной фазы обмотки статора при расчетной рабочей температуре: , Ом (3.15) , Ом (3.15)где  — активное сопротивление одной фазы обмотки статора при температуре Т1 , отличающейся от расчетной рабочей; α=0,004. — активное сопротивление одной фазы обмотки статора при температуре Т1 , отличающейся от расчетной рабочей; α=0,004.Потери на возбуждение: а) при возбуждении от отдельного возбудительного устройства:  , Вт (3.16) , Вт (3.16)где  — активное сопротивление обмотки возбуждения при расчетной рабочей температуре; — активное сопротивление обмотки возбуждения при расчетной рабочей температуре; =2В — падение напряжения в контакте щеток; =2В — падение напряжения в контакте щеток;Сопротивление обмотки возбуждения без учета вытеснения тока определяют по формуле и приводят к расчетной температуре:  , Ом (3.17) , Ом (3.17)где  — активное сопротивление при температуре Т1 , отличающейся от расчетной рабочей. — активное сопротивление при температуре Т1 , отличающейся от расчетной рабочей.б) при возбуждении от генератора постоянного тока (возбуди теля), сочлененного с валом синхронной машины:  , Вт (3.18) , Вт (3.18)где  - КПД возбудителя ( =0,8-0,85). - КПД возбудителя ( =0,8-0,85).Если обмотка возбуждения питается от собственного возбудителя, расположенного на валу приводного двигателя, то мощность, идущая на возбуждение генератора, а также на потери в возбудителе, следует прибавить к мощности P1. При независимом возбуждении к P1 прибавляется мощность, расходуемая в обмотке возбуждения генератора. Для схем с самовозбуждением мощность возбуждения вычитается из  , так как на возбуждение машины расходуется часть электрической мощности. , так как на возбуждение машины расходуется часть электрической мощности.Если возбуждение бесконтактное, эта составляющая потерь отсутствует Магнитные потери в синхронном генераторе происходят в сердечнике статора, который подвержен перемагничиванию вращающимся магнитным полем. Эти потери состоят из потерь от гистерезиса и потерь от вихревых токов:  , Вт (3.19) , Вт (3.19)Механические потери (Вт), равные сумме потерь на трение в подшипниках и потерь на вентиляцию (при самовентиляции машины):  , Вт (3.20) , Вт (3.20)где  — окружная скорость на поверхности полюсного наконечника ротора, м/с; — окружная скорость на поверхности полюсного наконечника ротора, м/с; — конструктивная длина сердечника статора, мм. — конструктивная длина сердечника статора, мм.Добавочные потери при нагрузке  в синхронном генераторе определяют в процентах от полезной мощности генератора. Для синхронных машин мощностью до 1000кВт добавочные потери при нагрузке принимают равными 0,5%, а для машин мощностью более 1000кВт — 0,25—0,4%. в синхронном генераторе определяют в процентах от полезной мощности генератора. Для синхронных машин мощностью до 1000кВт добавочные потери при нагрузке принимают равными 0,5%, а для машин мощностью более 1000кВт — 0,25—0,4%.Суммарные потери в синхронном генераторе:  , Вт (3.21) , Вт (3.21)Оставшаяся мощность отдается генератором в сеть (активная мощность, отбираемая от генератора при его номинальной нагрузке). Мощность Р2 является полезной мощностью генератора:  (3.22) (3.22)Здесь U1 и I1 — фазные значения напряжения и тока статора. Коэффициент полезного действия для синхронного генератора:  , Вт (3.23) , Вт (3.23)КПД синхронного генератора зависит от величины нагрузки  и от ее характера (cosφ). Графики этой зависимости представлен на рисунке 3.8. и от ее характера (cosφ). Графики этой зависимости представлен на рисунке 3.8.КПД синхронных машин мощностью до 100кВт составляет 80—90%, у более мощных машин КПД достигает 92—99%. Более высокие значения КПД относятся к турбо и гидрогенераторам мощностью в десятки и даже сотни тысяч киловатт. Подводимая механическая мощность  определяется по формуле: определяется по формуле: (3.24) (3.24)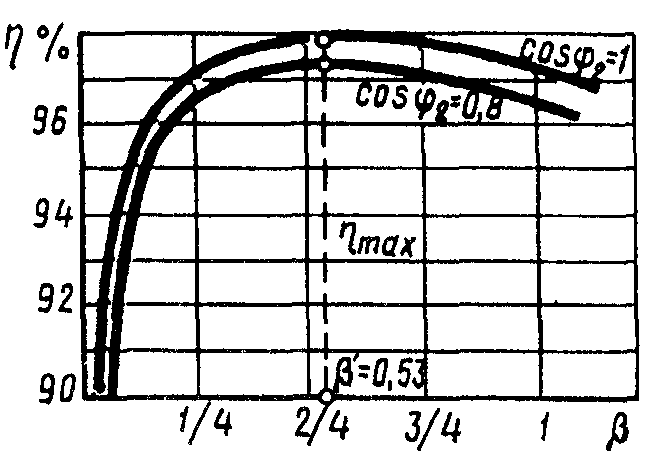 Рисунок 3.8 – График зависимости КПД и cosφ от величины нагрузки β. Характеристика холостого хода представляет собой зависимость ЭДС генератора в режиме холостого хода Е0 от тока возбуждения Iв при номинальной скорости вращения n2=n1. Характеристику холостого хода принято строить в относительных единицах:  , (3.25) , (3.25)где  , ,  За характеристику холостого хода принимают среднюю линию, проведенную между восходящей и нисходящей ветвями характеристики. 3.7 Параллельная работа синхронных генераторов Современные мощные энергосистемы состоят из большого числа электрических станций, работающих параллельно друг с другом. Благодаря этому повышаются надежность и экономичность производства и распределения электрической энергии. Появляется возможность маневрирования работой отдельных станций с учетом наиболее рациональных условий преобразования различных видов энергии, уменьшается мощность аварийного и ремонтного резервов. Так как на каждой из станций установлены десятки генераторов, то в энергосистеме на параллельную работу будет включено несколько сотен машин. При любых изменениях режима работы отдельного генератора, включенного в систему, напряжение в ней и частота остаются постоянными. Они поддерживаются всеми остальными генераторами системы. В дальнейшем при рассмотрении параллельной работы синхронного генератора будем исходить из условия, что Uс = const и f = соnst. Существуют два способа включения синхронного генератора на параллельную работу с сетью: способ точной синхронизации и способ самосинхронизации (грубой синхронизации). При включении синхронного генератора на параллельную работу с сетью по способу точной синхронизации стремятся к тому, чтобы при включении не возникало больших бросков тока. Большие толчки тока вызывают большие моменты, действующие как на ротор, так и на статор, и силы, которые могут привести к разрушению обмотки статора. Для того чтобы исключить броски тока при включении генератора, необходимо выполнить следующие условия: 1) равенство ЭДС генератора Ео и напряжения сети Uс; 2) равенство частот генератора fг и сети fс; 3) ЭДС генератора Ео и напряжение сети Uс должны находиться в противофазе; 4) чередование фаз ЭДС генератора и напряжения сети должно быть одинаковым (для трехфазных генераторов). При включении генератора на параллельную работу выполнение первого условия проверяется по вольтметрам, включенным в сеть и на выводы генератора. Равенства Uг = Uс добиваются путем регулирования тока возбуждения генератора. Остальные условия проверяются с помощью специальных приборов, называемых синхроноскопами. Простейшим синхроноскопом является ламповый. Наиболее благоприятным моментом для включения генератора в сеть будет момент времени, когда лампы погаснут. На практике при включении генератора на параллельную работу с сетью регулируют скорость приводного двигателя и добиваются, чтобы промежутки времени между следующими друг за другом погасаниями ламп были достаточно большими, чтобы успеть включить генератор на параллельную работу. Для трехфазных генераторов применяются две схемы включения ламп: на потухание и на вращение света.  Рисунок 3.9 - Схема включения трехфазного синхронного генератора на параллельную работу с сетью. Лампы синхроноскопа включены по схеме на потухание света (а) и на вращение света (б) Рассмотрим первую схему (рисунок 3.9а), когда лампы включены между точками А'—А", В'—В" и С'—С", каждая пара относится к одной фазе. В момент включения выключателя напряжения между этими точками должны быть равны нулю и все три лампы должны погаснуть. При этом напряжение Uc и ЭДС Ео для каждой фазы действуют навстречу друг другу, т. е. они находятся в противофазе. Во второй схеме (рисунок 3.9б) одна из ламп подключается к точкам одной фазы А'—А", а две другие лампы — между точками разных фаз В'—С" и С'—В". В этой схеме до включения выключателя лампы будут попеременно загораться и гаснуть. Это будет происходить из-за взаимного перемещения векторов напряжения Uc и ЭДС Еo, вызванного несовпадением их частот. Включение выключателя должно быть произведено, когда одна лампа (между А'—А") погаснет, а две другие, лампы будут гореть с одинаковым накалом. Перед включением выключателя следует добиться, чтобы вращение света происходило с небольшой скоростью, что достигается регулированием скорости приводного двигателя. Лампы гаснут при напряжениях, равных 30—60% их номинального напряжения, поэтому, для того чтобы более точно выбрать момент включения выключателя параллельно лампе между точками А'—А" включают так называемый нулевой вольтметр. Стрелка этого вольтметра при медленных колебаниях, соответствующих потуханию и загоранию ламп, покажет нуль, когда напряжение между точками А'—А" равно нулю. С помощью лампового синхроноскопа можно определить соответствие порядка чередования фаз сети и генератора. Если при включении ламп между точками А'—А", В'—В" и С'—С" будет наблюдаться вращение света, а при второй схеме будет наблюдаться одновременное загорание и погасание ламп, то это будет означать, что сеть и генератор имеют разный порядок чередования фаз. Изменить порядок чередования фаз сети или генератора можно путем переключения двух фаз между собой. В настоящее время на электрических станциях применяются более сложные синхроноскопы, позволяющие автоматизировать процесс включения генератора на параллельную работу. Включение синхронного генератора на параллельную работу методом точной синхронизации занимает довольно много времени (до 10 мин). Для ускорения включения применяют способ самосинхронизации. Включение этим способом проводится следующим образом. Приводным двигателем скорость невозбужденного ротора генератора доводится почти до номинальной (синхронной). Затем обмотка статора включается в сеть при быстром вслед за этим включении тока в обмотке возбуждения. После переходного процесса генератор втягивается в синхронизм и оказывается включенным на параллельную работу. Недостаток метода самосинхронизации — значительные токи в процессе синхронизации. Он используется при необходимости быстро включать машину в систему. Перед первым включением генератора на параллельную работу способом самосинхронизации следует предварительно проверить ранее указанным методом совпадение чередования фаз сети и генератора. Пока генератор не включен в сеть, его скорость не остается постоянной, после включения в сеть скорость становится строго постоянной, т. е. машина держится в синхронизме. Включив синхронный генератор на параллельную работу с сетью следует его нагрузить Активную мощность генератора, работающего параллельно с сетью, можно регулировать изменением момента на его валу путем воздействия на двигатель (турбину), приводящий (приводящую) во вращение генератор (за счет изменения подачи воды или пара в турбину, путем изменения тока возбуждения у двигателя постоянного тока и др.). Реактивную мощность синхронного генератора, работающего параллельно с сетью, регулируют, изменяя ток в обмотке возбуждения. Если увеличить ток возбуждения (перевозбудить машину), то ЭДС Е0возрастет и U 0. Вследствие этого в цепи статора возникает ток, который будет отставать от U и Е0 на угол φ=90°. При этом генератор вырабатывает только реактивную мощность, которую отдает в сеть. Ток статора и реактивная мощность будут увеличиваться с возрастанием тока возбуждения. Если от точки равновесия, когда Е0 = Uс, начать уменьшать ток возбуждения и ЭДС Е0 (недовозбуждать машину), то здесь также появится ток, но противоположного, чем прежде, направления. Поэтому ток статора, отставая от U на угол 90°, будет опережать ЭДС Е0 на тот же угол. Реактивная мощность изменит свое направление, и будет поглощаться из сети. Ток в статоре будет тем больше, чем меньше будет ток возбуждения. Таким образом, изменение возбуждения генератора вызывает лишь появление реактивного тока. При перевозбуждении генератор будет работать с отстающим током по отношению к Е0, а при недовозбуждении — с опережающим. Векторная диаграмма неявнополюсной синхронной машины при параллельной работе с сетью бесконечной мощности при синусоидальном поле в зазоре показана на рисунке 8.2. Особенностью векторной диаграммы синхронной машины при параллельной работе с сетью является постоянство напряжения, так как напряжение сети не изменяется ни при каких изменениях в режиме работы машины. 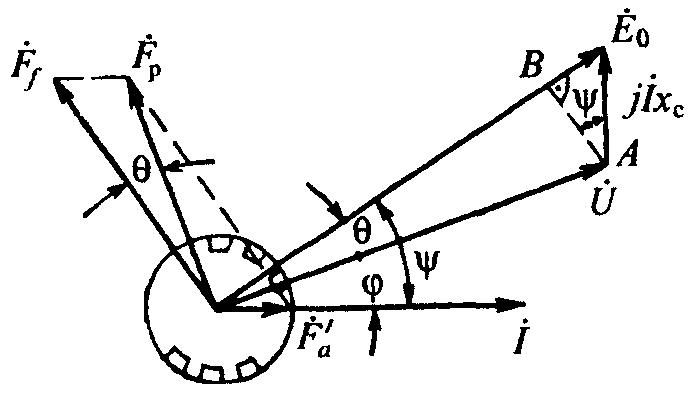 Рисунок 3.10 - Векторная диаграмма синхронной машины при параллельной работе с сетью Из векторной диаграммы для ненасыщенной машины:  (3.26) (3.26) (3.27) (3.27)Подставляя значение cosψ в выражение (8.1), получим:  (3.28) (3.28)Соответственно электромагнитный момент:  (3.29) (3.29)Электромагнитная мощность и электромагнитный момент зависят от U, Е0 , хс и угла θ. Из векторной диаграммы видно, что угол θ — это угол между Е0 и U, а также между Ff и результирующей МДС Fp или угол между осью полюса и максимумом результирующего потока. Временному сдвигу на векторной диаграмме соответствует пространственный сдвиг между осью результирующего поля машины и осью полюсов. Угол θ определяет активную мощность машины и называется углом нагрузки. По формуле (3.28) может быть построена угловая характеристика Рм=f(θ) (рисунок 3.11). 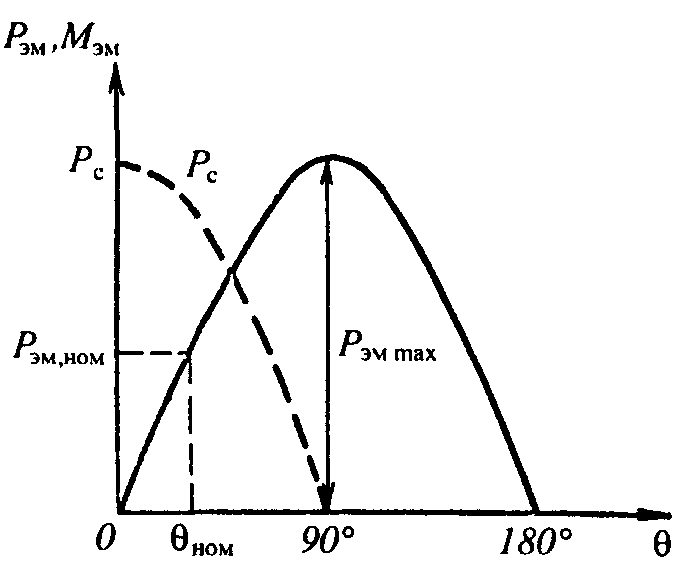 Рисунок 3.11 - Угловая характеристика неявнополюсной синхронной машины Из угловой характеристики следует, что максимум электромагнитной мощности имеет место при θ=90°:  (3.30) (3.30)и соответственно максимальный электромагнитный момент  (3.31) (3.31)Максимальная электромагнитная мощность Рэм max определяет предел статической устойчивости машины, т.е. ее способность оставаться в синхронизме. Увеличение нагрузки за предел статической устойчивости приводит к выпадению машины из синхронизма. На угловой характеристике от угла θ, равного нулю, до θ=90° расположена устойчивая часть характеристики, а в пределах угла от θ=90° до θ=180° — неустойчивая часть характеристики. Работа синхронной машины устойчива, если положительному (отрицательному) приращению Δθ соответствует положительное (отрицательное) приращение РЭМ, т.е.  (3.32) (3.32)Полнее это характеризует удельная синхронизирующая мощность, — первая производная РЭМ по углу θ (Вт/рад):  (3.33) (3.33)Зависимость синхронизирующей мощности от угла θ показана на рисунке 3.11 штриховой линией. Синхронизирующая мощность удерживает машину в синхронизме. Она обеспечивает упругую связь машины с сетью. Синхронизирующая мощность максимальна, когда РЭМ=0. Когда машина находится на пределе статической устойчивости, т.е. электромагнитная мощность равна своему максимальному значению, Рс=0. Если запас синхронизирующей мощности равен нулю, машина выпадает из синхронизма и перестает работать как синхронный генератор. При выпадении из синхронизма наступает асинхронный режим. В асинхронном режиме с синхронной машины должно быть снято возбуждение. Этот режим для синхронных машин допускается кратковременно. Номинальная нагрузка синхронных генераторов обычно рассчитывается при угле θ=20-30°. Поэтому кратковременно машина может работать при 1,5—2-кратном увеличении нагрузки, не выпадая из синхронизма. Отношение  называется статической перегружаемостью синхронной машины. называется статической перегружаемостью синхронной машины.Статическая перегружаемость определяется формулой:  (3.34) (3.34)Выражение (3.34) получено при условии, что сопротивление обмотки статора равно нулю и не учитывается насыщение. Статическая перегружаемость турбогенераторов мощностью до 300 МВт должна быть не менее 1,7, а для турбогенераторов мощностью 500-1200 МВт — не менее 1,6. Статическая перегружаемость гидрогенераторов — не ниже 1,7. Поле в синхронной машине, работающей параллельно с сетью, создается обмоткой возбуждения и реактивными токами, протекающими в обмотке статора. Результирующее поле, как это видно из векторной диаграммы (рисунок 3.12), определяется МДС обмотки статора и обмоткой возбуждения. При изменении тока в обмотке возбуждения изменяется Е0 , что приводит к изменению реактивного тока, замыкающегося в контуре сеть—машина. 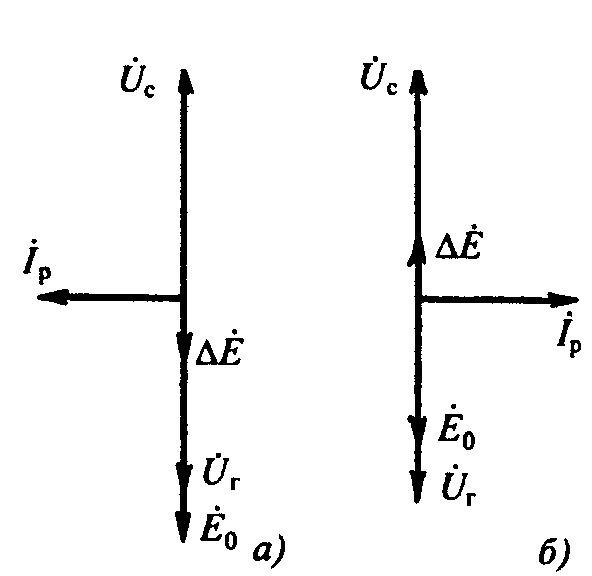 Рисунок 3.12 - Векторные диаграммы при регулировании реактивной мощности При увеличении тока в обмотке возбуждения (перевозбуждении машины) вектор Uс не будет уравновешивать Е0 и появится «избыточная» ЭДС ΔЕ=U+Е0 (рисунок 8.4а), которая вызовет появление реактивного тока:  (3.35) (3.35)где Iр — реактивный ток, отстающий от ΔЕ и напряжения генератора Uг. По отношению к напряжению сети Iр — опережающий ток. При уменьшении тока возбуждения (недовозбуждении машины) U > Е0 (рисунок 8.4б) и реактивный ток Iр отстает от напряжения сети. Изменяя ток возбуждения, можно регулировать cosφ синхронного генератора, работающего параллельно с сетью. Минимуму тока статора на U-образной характеристике соответствует cosφ=l. При увеличении активной мощности, отдаваемой генератором в сеть, U-образные характеристики будут располагаться выше, при этом точки, соответствующие минимальному току статора (активному току Iа) и cosφ=l, будут перемещаться вправо. Объясняется это тем, что при увеличении Iа возрастает падение напряжения в статоре, и чтобы уравновесить это падение напряжения, потребуется увеличение тока возбуждения Iв. Если при всех изменениях тока возбуждения вращающий момент приводного двигателя остается неизменным, то также неизменной остается активная мощность генератора:  (3.36) (3.36)Из этого выражения следует, что при Uc=const активная составляющая тока статора I1•cosφ = const. Таким образом, степень возбуждения синхронного генератора влияет только на реактивную составляющую тока статора. Что же касается активной составляющей тока, то она остается неизменной. Зависимость тока статора I1 от тока в обмотке возбуждении Iв при неизменной активной нагрузке генератора выражается графически U-образной кривой. На рисунке 3.13 представлены U-образные характеристики I1 =f(Iв) при Р2 = const, построенные для разных значений активной нагрузки: P2 = 0; Р2 = 0,5Рном и P2 = Рном 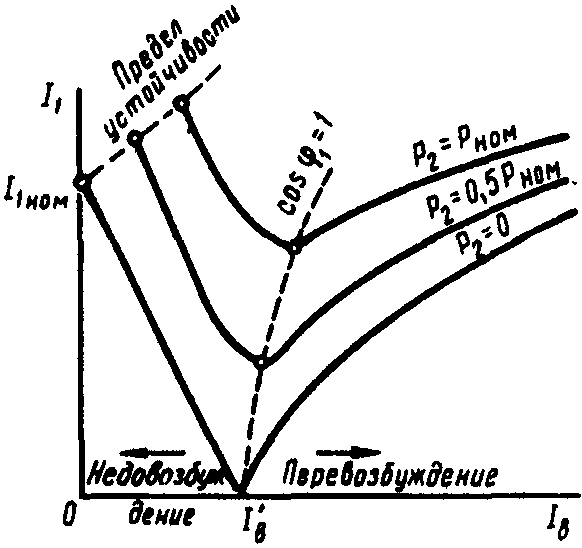 Рисунок 3.13 - U-образные характеристики синхронного генератора работающего параллельно с сетью при различных значениях нагрузки U-образные характеристики синхронного генератора показывают, что любой нагрузке генератора соответствует такое значение тока возбуждения Iв', при котором ток статора I1 становится минимальным и равным только активной составляющей. В этом случае генератор работает при коэффициенте мощности cosφ=1. Значения тока возбуждения, соответствующие cosφ=1 при различной нагрузке генератора, показаны пунктирной линией. Некоторое отклонение линии вправо указывает на то, что при увеличении нагрузки ток возбуждения, соответствующий cosφ=1 , несколько возрастает. Объясняется это тем, что при росте нагрузки необходимо некоторое увеличение тока возбуждения, компенсирующее активное падение напряжения. Необходимо иметь в виду, что при постепенном уменьшении тока возбуждения наступает такое минимальное его значение, при котором магнитный поток обмотки возбуждения оказывается настолько ослабленным, что синхронный генератор выпадает из синхронизма — нарушается магнитная связь между возбужденными полюсами ротора и вращающимся полем статора. Если соединить все точки минимально допустимых значений тока возбуждения на U-образных характеристиках (штриховая линия в левой части рисунка3.13), то получим линию предела устойчивости работы синхронного генератора при недовозбуждении. С точки зрения уменьшения потерь генератора наиболее выгодным является возбуждение, соответствующее минимальному току статора, т. е. когда cosφ=1. Но в большинстве случаев нагрузка генератора имеет индуктивный характер и для компенсации индуктивных токов (отстающих по фазе от напряжения сети) приходится несколько перевозбуждать генератор, создавая условия, при которых ток статора I1 опережает по фазе напряжение сети Uс. Следует отметить, что для сохранения cosφ неизменным при изменениях активной нагрузки генератора, требуется одновременное изменение тока возбуждения генератора. СИНХРОННЫЕ ДВИГАТЕЛИ Синхронные двигатели применяются главным образом для привода устройств большой мощности. Такие двигатели по своим технико-экономическим показателям превосходят двигатели других типов. Большую группу синхронных машин составляют синхронные двигатели, которые обычно изготовляются мощностью до нескольких тысяч киловатт и предназначены для привода мощных вентиляторов, мельниц, насосов и других устройств, не требующих регулирования частоты вращения. Характерным отличием синхронных двигателей является постоянство частоты вращения при изменении нагрузки. Синхронные двигатели имеют предельно жесткие механические характеристики. Максимальный момент синхронного двигателя пропорционален U, а асинхронного — U2, поэтому синхронные двигатели менее чувствительны к изменению напряжения сети и имеют большую перегрузочную способность. Регулирование потока возбуждения путем изменения тока возбуждения обеспечивает регулирование реактивной мощности при падении напряжения и уменьшении частоты сети. Недостатком синхронных двигателей является их более сложная конструкция, необходимость в источнике постоянного тока и худшие по сравнению с асинхронными двигателями пусковые свойства. При мощности двигателей от нескольких киловатт до 100 кВт проявляется еще один недостаток синхронных двигателей — склонность к качаниям. При определенном соотношении параметров синхронных двигателей ротор покачивается около синхронной частоты вращения. Синхронные двигатели при условии легких пусков целесообразно применять при мощности свыше 200 кВт. Области применения синхронных двигателей непрерывно расширяются, и их мощности возрастают до 50 МВт. Синхронные двигатели мощностью до 1—2 кВт выполняются с явнополюсным ротором без обмотки возбуждения. За счет различия проводимости по продольной и поперечной осям машины в таких машинах возникает реактивный момент, а асинхронный пуск обеспечивается демпферной обмоткой. Синхронные двигатели конструктивно почти не отличаются от синхронных генераторов. Они также состоят из статора с обмоткой и ротора. Поэтому независимо от режима работы любая синхронная машина нуждается в процессе возбуждения — наведения в ней магнитного поля. Для возбуждения синхронных двигателей используется электромашинная система возбуждения или тиристорная система возбуждения. В электромашинных системах возбуждения якорь возбудителя — генератора постоянного тока — соединяется с валом синхронного двигателя жестко или в тихоходных машинах — через клиноременную передачу, которая обеспечивает увеличение частоты вращения возбудителя и снижение его массы. Системы возбуждения синхронных двигателей принципиально не отличаются от систем возбуждения генераторов. Ротор синхронного двигателя вращается с той же скоростью, что и магнитное поле машины. Синхронное вращение можно объяснить взаимодействием полюсов ротора и полюсов результирующего вращающегося поля. Вращающееся магнитное поле вследствие взаимодействия полей статора и ротора увлекает за собой ротор. При нагрузке двигателя под воздействием тормозного момента его ротор, продолжая вращаться синхронно, смещается относительно результирующего поля машины на угол θ. Чем больше нагрузка на валу, тем больше угол θ. Под углом θ, как и раньше, понимается угол между осью полюсов ротора и осью результирующего поля. Но в отличие от генератора, где ротор опережает поле, в двигателе он отстает от поля, т. е. является ведомым, поэтому для двигателей этот угол принимают отрицательным. При построении векторной диаграммы синхронного двигателя принято фазу тока определять по отношению к вектору напряжения сети Uc. Построение векторных диаграмм синхронного двигателя при известных Uд , I и угле между ними выполняется так же, как и для генератора. Исходя из уравнения:  (4.1) (4.1)Если при построении векторной диаграммы исходить из известного напряжения сети Uc=U, то уравнение (4.1) будет иметь вид:  (4.2) (4.2)На рисунке 4.1 показаны векторы МДС обмотки возбуждения и составляющих реакции статора. 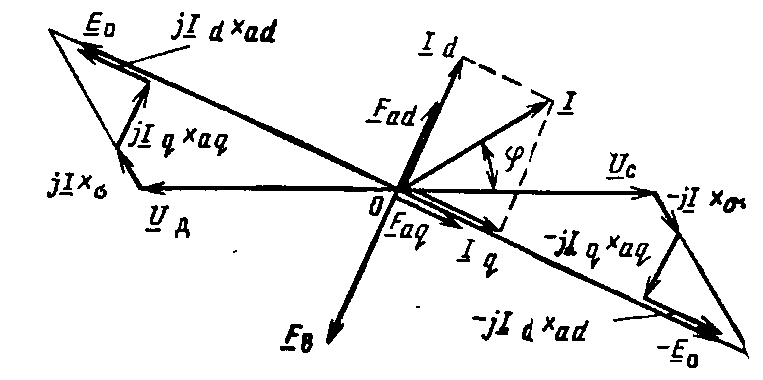 Рисунок 4.1 - Векторная диаграмма явнополюсного синхронного двигателя Первый вектор отложен в сторону опережения ЭДС Е0 на 90°, а два других — в фазе с токами Id и Iq. Из рисунка 9.1 видно, что продольная реакция статора в синхронном двигателе при опережающем токе действует размагничивающим образом (Fad направлен против FВ). Аналогично можно показать, что при отстающем токе продольная реакция статора будет оказывать намагничивающее действие. Уравнения для электромагнитной мощности синхронного двигателя можно получить из векторных диаграмм. Если пренебречь активным сопротивлением обмотки статора, то для явнополюсного двигателя электромагнитная мощность будет равна:  (4.3) (4.3)В неявнополюсном двигателе Xd=Xq, и поэтому вторая составляющая Р" будет отсутствовать. Разделим (4.3) на угловую скорость ротора:  (4.4) (4.4)Тогда электромагнитный момент:  (4.5) (4.5)В двигателе электромагнитный вращающий момент направлен в сторону вращения ротора. В явнополюсном двигателе за счет второй составляющей М" (реактивного момента) вращающий момент может создаваться и при отсутствии возбуждения Iв=0 (E0=0). На рисунке 9.3 показана угловая характеристика M=f(θ). Область двигательного режима находится в зоне отрицательных углов θ. Устойчивой частью угловой характеристики в двигательном режиме является область от 0 до -90°. Номинальный момент, соответствующий θном , находится в области 20—30°. Двигатель с неявнополюсным ротором имеет максимум момента при θ=-90°:  (4.6) (4.6)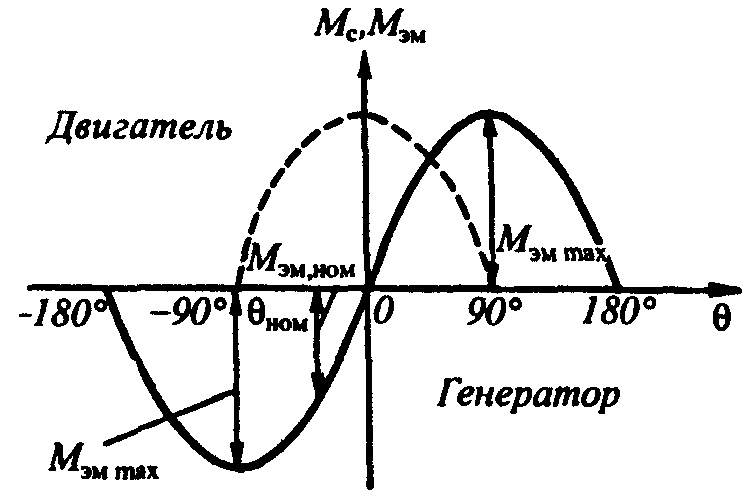 Рисунок 4.2 - Угловая характеристика синхронного двигателя. Максимальный момент зависит от размера воздушного зазора двигателя. Чем больше зазор, тем меньше xd и больше Мэм.max Однако при большом зазоре растут габариты машины. Предел статической устойчивости синхронного двигателя:  (4.7) (4.7)Удельный синхронизирующий момент, как и в генераторном режиме, максимален при θ = 0 и равен нулю при θ = 90°. Величина Мmах характеризует перегрузочную способность машины. Кратность максимального момента определяется по формуле:  (4.8) (4.8)Согласно ГОСТ 183-74 эта кратность должна быть не менее 1,65. Зависимость M=f(θ), представляющая собой угловую характеристику синхронного двигателя, является его механической характеристикой. При номинальной нагрузке θном=20—30°. Синхронный двигатель потребляет электрическую мощность P1 из сети. Часть этой мощности расходуется на электрические потери в обмотке статора Рэ1 и магнитные потери Рмв статоре, а остальная ее часть передается вращающимся магнитным полем от статора к ротору. Эта мощность называется электромагнитной. 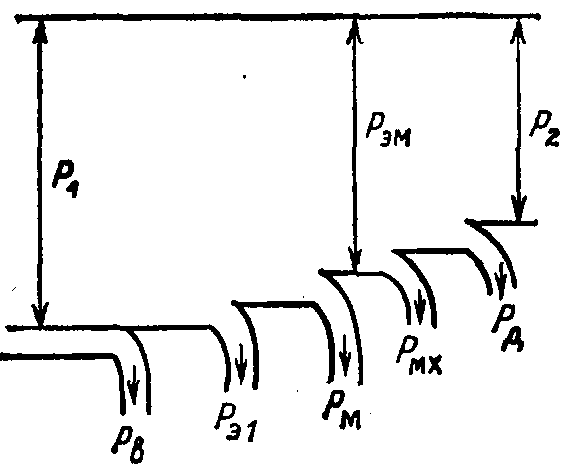 Рисунок 4.3 - Преобразование мощности в синхронном двигателе Электромагнитная мощность Рэм преобразуется в механическую, развиваемую ротором. Частично мощность Рэм расходуется на покрытие механических Рмх и добавочных Рд потерь. Оставшаяся ее часть Р2 является полезной механической мощностью на валу двигателя. U-образные характеристики для различных значений Р (или М) представлены на рисунке 4.4. 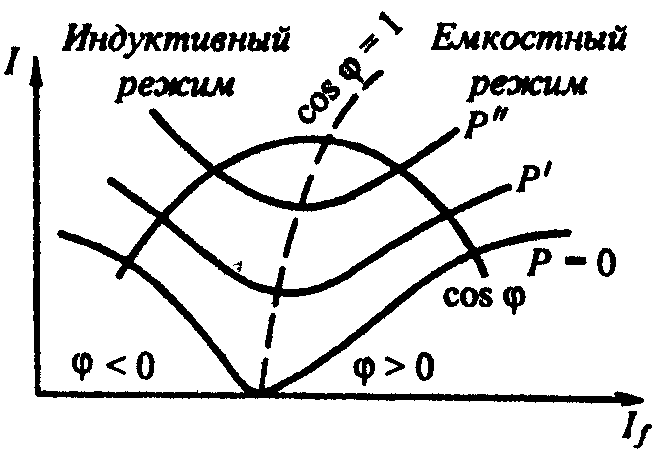 Рисунок 4.4 - U-образные характеристики синхронного двигателя при различных значениях нагрузки. При перевозбуждении двигатель генерирует реактивную мощность непосредственно у потребителя, что способствует повышению cosφ сети. Это позволяет снизить реактивную мощность, вырабатываемую синхронными генераторами на электрических станциях, и уменьшить потери в линиях электропередач. Возможность генерировать реактивную мощность выгодно отличает синхронные двигатели от асинхронных, которые потребляют реактивную мощность для возбуждения. Поэтому синхронные двигатели проектируются для работы при номинальной мощности с перевозбуждением (с опережающим током) и cosφном=0,9. Работа с перевозбуждением предпочтительна также и для повышения максимального момента двигателя. Отсюда следует, что при любых нагрузках на валу синхронные двигатели могут работать с различными значениями cosφ, в том числе и с cosφ=1. Достигается это изменением тока в обмотке возбуждения. |