Электр маш конспект. Трансформаторы основные теоретические сведения
 Скачать 0.96 Mb. Скачать 0.96 Mb.
|

4.1 Пуск синхронного двигателяСинхронный двигатель непосредственным включением обмотки статора (якоря) в сеть переменного тока не может быть запущен в ход. Объясняется это следующим образом. При включении многофазной обмотки статора в сеть практически мгновенно образуется вращающееся магнитное поле, частота вращения которого n зависит от частоты f протекающего по обмоткам тока:  (4.9) (4.9)Полюса этого поля, перемещаясь в пространстве, будут взаимодействовать то с одноименными, то с разноименными полюсами неподвижного, возбужденного ротора. В соответствии с этим будет меняться направление вращающего момента, действующего на ротор. В течение половины периода изменения тока в обмотках момент будет направлен в одну сторону, а в течение другой половины — в противоположную. Пуск мог бы произойти, если бы ротор разогнался до установившейся скорости в течение полупериода, когда вращающий момент не меняет свой знак. При частоте 50 Гц полупериод равен 0,01 с. Из-за механической инерции за такое время роторы практически всех синхронных двигателей развернуться не смогут. Существует несколько способов пуска двигателя. Эти способы заключаются в том, что в процессе пуска ротор двигателя разгоняется до скорости вращающегося поля, после чего двигатель входит в синхронизм и начинает работать как синхронный. Применение получили пуск с помощью разгонного двигателя, частотный пуск и асинхронный пуск. Наибольшее распространение имеет асинхронный пуск. Пуск с помощью разгонного двигателя состоит в том, что посторонним (разгонным) двигателем ротор синхронной машины разгоняется до номинальной скорости. Обмотка возбуждения включена в сеть постоянного тока, а обмотка статора разомкнута. Затем производят включение ее на параллельную работу с сетью. После подключения машины к сети разгонный двигатель механически отсоединяют от вала синхронной машины, и последняя переходит в двигательный режим. Мощность разгонного двигателя невелика и составляет 10—20% номинальной мощности синхронного двигателя. Эта мощность покрывает мощность механических и магнитных потерь в синхронном двигателе. Частотный пуск применяется в том случае, если синхронный двигатель подключен к автономному источнику, частоту напряжения которого можно изменять от нуля до номинальной. Если плавно повышать частоту питающего напряжения, то соответственно будет увеличиваться скорость магнитного поля. Ротор, следуя за полем, постепенно будет повышать свою скорость от нуля до номинальной. В процессе пуска машина все время работает в синхронном режиме. Асинхронный пуск аналогичен пуску асинхронного двигателя. Для этого на роторе в полюсных наконечниках размещают пусковую обмотку. Эта обмотка выполняется по типу короткозамкнутой обмотки ротора асинхронного двигателя и имеет то же устройство, что и демпферная обмотка генератора. При пуске трехфазная обмотка статора включается в сеть. Ток, который будет протекать по этой обмотке, создаст вращающееся магнитное поле. Оно наведет в пусковой обмотке ротора ЭДС и ток. В результате взаимодействия тока пусковой обмотки ротора с вращающимся магнитным полем образуется момент, под действием которого ротор придет во вращение и разгонится до скорости, близкой к скорости поля ω1. Вращение его будет происходить со скольжением, которое зависит от нагрузки на валу (ω < ω1). Вхождение в синхронизм достигается после включения постоянного тока в обмотку возбуждения за счет возникающего при этом синхронизирующего момента. С этого времени машина начинает работать как синхронный двигатель. При пуске обмотка возбуждения не должна быть разомкнутой, так как в противоположном случае вследствие большого числа витков в ней вращающимся полем индуцировалась бы большая ЭДС, опасная не только для изоляции, но и для обслуживающего персонала. Обмотку возбуждения нельзя также замыкать накоротко, так как в этом случае она образует несимметричный (однофазный) контур. Он явится причиной образования дополнительного момента, под действием которого произойдет провал в кривой механической характеристики вблизи полусинхронной скорости. 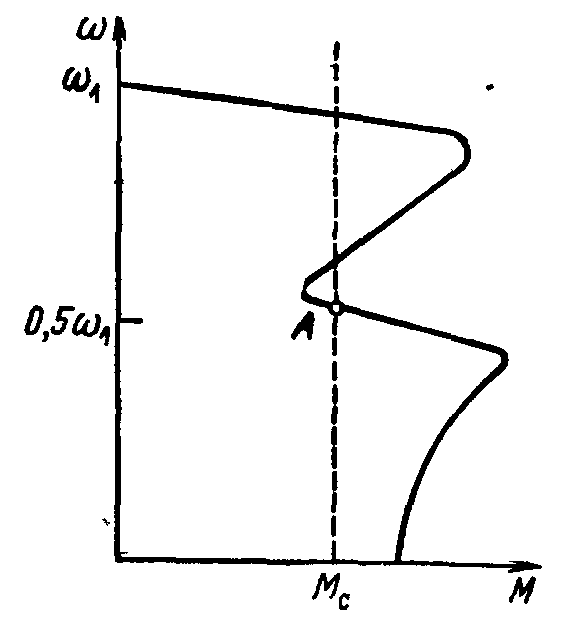 Рисунок 4.5 - Механическая характеристика двигателя при асинхронном пуске с провалом вблизи полусинхронной скорости. Из-за этого ротор при пуске может застрять на промежуточной скорости (в точке А на рисунке 4.5). В начале пуска обмотка возбуждения должна быть замкнута на резистор с сопротивлением, приблизительно в 10—15 раз большим, чем сопротивление самой обмотки. По окончании пуска обмотка возбуждения включается в сеть постоянного тока. Асинхронный пуск синхронного двигателя характеризуется значениями пускового тока Iп и вращающих моментов — начального пускового Мп и входного Мвх. Входным называется асинхронный момент при скорости ротора, равной 0,95ω1. Этот момент равен наибольшему нагрузочному моменту, при котором возможно вхождение двигателя в синхронизм при включении постоянного тока в обмотку возбуждения. 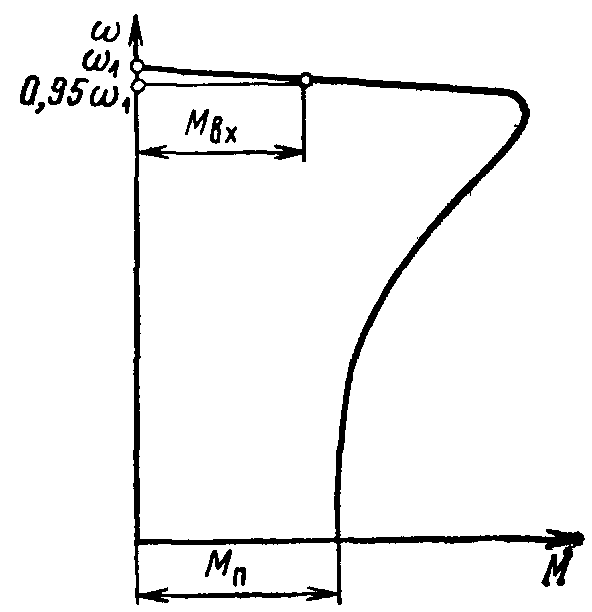 Рисунок 4.6 - Механическая характеристика двигателя при асинхронном пуске. Если сеть, в которую включается синхронный двигатель, недостаточно мощна, то во избежание большого падения напряжения при асинхронном пуске применяют меры для снижения начального пускового тока: включение через автотрансформатор, реактор и т.д. 4.2 Рабочие характеристики. Рабочие характеристики синхронного двигателя представляют собой зависимости тока статора Iа, электрической мощности P1, поступающей в обмотку статора, КПД и cosφ от отдаваемой механической мощности P2 при Uс=const, fс=const и Iв=const. 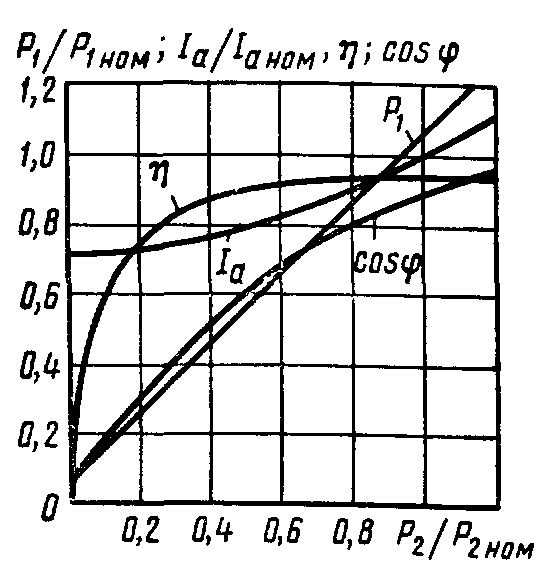 Рисунок 4.7 - Рабочие характеристики синхронного двигателя. Часто эти характеристики строят в относительных единицах. Поскольку частота вращения синхронного двигателя постоянна, зависимость n2=f(Р2) обычно не приводится. Зависимость P1=f(P2) имеет характер, близкий к линейному.  (4.10) (4.10)Мощность Р2 является полезной мощностью синхронного двигателя:  (4.11) (4.11)Полезный момент на валу синхронного двигателя:  (4.12) (4.12)Ток двигателя при холостом ходе является практически реактивным. По мере роста нагрузки возрастает активная составляющая тока, в связи с чем зависимость тока Iа от мощности Р2 является нелинейной.  (4.13) (4.13)Кривая ŋ=f(P2) имеет характер, общий для всех электрических машин.  (4.14) (4.14)Синхронные двигатели могут работать при cosφ=1, но обычно их рассчитывают на работу при номинальной нагрузке с опережающим током и cosφном=O,9 - 0,8. В этом случае улучшается суммарный cosφ сети, так как создаваемая ими опережающая реактивная составляющая тока Iа компенсирует отстающую реактивную составляющую тока асинхронных двигателей. Зависимость cosφ=f(P2) при работе машин с перевозбуждением имеет максимум в области Р2>Рном. При снижении Р2 значение cosφуменьшается, а отдаваемая в сеть реактивная мощность возрастает. 4.3 Сравнительная оценка синхронных двигателей с асинхронными Синхронные двигатели имеют следующие достоинства: а) возможность работы при cosφ=1; это приводит к улучшению cosφ сети, а также к сокращению размеров двигателя, так как его ток меньше тока асинхронного двигателя той же мощности. При работе с опережающим током он является генератором реактивной мощности, поступающей в асинхронные двигатели, что снижает потребление этой мощности от генераторов электростанций; б) меньшую чувствительность к колебаниям напряжения, так как их максимальный момент пропорционален напряжению в первой степени (а не квадрату напряжения); в) строгое постоянство частоты вращения независимо от механической нагрузки на валу. Недостатками синхронных двигателей являются: а) сложность конструкции; б) сравнительная сложность пуска; в) трудности регулирования частоты вращения, которое возможно только путем изменения частоты питающего напряжения. 5. ГЕНЕРАТОРЫ ПОСТОЯННОГО ТОКА 5.1.Основные теоретические сведения Классификация генераторов постоянного тока производится по способу их возбуждения. Они подразделяются на генераторы с независимым возбуждением и с самовозбуждением. У генераторов с самовозбуждением обмотка возбуждения получает питание от собственного якоря. В зависимости от способа ее включения генераторы с самовозбуждением подразделяются на генераторы с параллельным, последовательным и смешанным возбуждением. Согласно ГОСТ 183-74 для машин постоянного тока принято следующее обозначение выводов обмоток: обмотки якоря Я1-Я2, независимой обмотки возбуждения Н1-Н2, параллельной обмотки возбуждения Ш1-Ш2, последовательной обмотки возбуждения С1-С2, обмотки дополнительных полюсов Д1-Д2, компенсационной обмотки К1-К2. Цифра 1 обозначает начало, а цифра 2 — конец обмотки. По конструктивному выполнению машина постоянного тока с параллельным возбуждением подобна машине с независимым возбуждением, у которой обмотка якоря расположена на роторе, а обмотка возбуждения — на статоре. Основные соотношения, характеризующие работу машины в качестве генератора, можно представить в виде приведенных ниже уравнений. Эти уравнения справедливы для всех генераторов независимо от способа их возбуждения. Напряжение на выводах генератора всегда будет меньше наводимой в обмотке якоря ЭДС Е на значение падения напряжения:  (5.1) (5.1)Падение напряжения в цепи якоря состоит из двух составляющих:  — падения напряжения в обмотках, — падения напряжения в обмотках,  — падения напряжения в щеточном контакте. Сопротивление — падения напряжения в щеточном контакте. Сопротивление  включает в себя сопротивления обмотки якоря и всех последовательно соединенных с ней обмоток. В общем случае: включает в себя сопротивления обмотки якоря и всех последовательно соединенных с ней обмоток. В общем случае: (5.2) (5.2)где rа, rД, rс, rк — сопротивления обмоток якоря, дополнительных полюсов, последовательной (сериесной) и компенсационной. В зависимости от конкретной схемы генератора часть сопротивлений в будет отсутствовать.Для приближенных расчетов уравнение (5.2) можно упростить:  (5.3) (5.3)где  (5.4) (5.4)Переходное сопротивление щеточного контакта rщ приближенно принимается постоянным и равным:  (5.5) (5.5)Ток якоря генератора Ia обусловлен ЭДС Е и всегда имеет с ней одинаковое направление:  (5.6) (5.6)Уравнение баланса мощности получим, если правую и левую часть (5.1) умножим на ток Iа:  (5.7) (5.7)Произведение  называется электромагнитной мощностью и представляет собой полную электрическую мощность, которая получается в результате преобразования механической мощности. Часть этой мощности расходуется в цепи якоря на электрические потери в обмотках называется электромагнитной мощностью и представляет собой полную электрическую мощность, которая получается в результате преобразования механической мощности. Часть этой мощности расходуется в цепи якоря на электрические потери в обмотках  и в переходном сопротивлении щеточного контакта и в переходном сопротивлении щеточного контакта  . Остальная часть мощности, равная произведению . Остальная часть мощности, равная произведению  , является отдаваемой мощностью генератора. , является отдаваемой мощностью генератора.В генераторах параллельного и смешанного возбуждения полезная мощность, отдаваемая в сеть, P2 будет меньше на значение мощности, затрачиваемой на возбуждение:  . (5.8) . (5.8)От двигателя, приводящего во вращение якорь генератора, подводится механическая мощность P1. Большая часть этой мощности преобразуется в электрическую Рэм, а другая ее часть расходуется в генераторе на покрытие механических потерь Рмх (трение в подшипниках, вентиляцию), магнитных потерь в якоре Рм и добавочных потерь Рд:  . (5.9) . (5.9)Рассмотренное преобразование мощности в генераторах постоянного тока параллельного возбуждения для наглядности можно представить в виде энергетической диаграммы (рисунок 5.1). 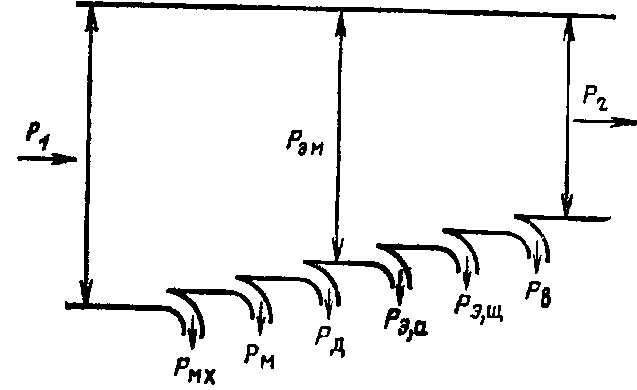 Рисунок 5.1 - Энергетическая диаграмма генератора параллельного возбуждения Разделив правую и левую части уравнения (5.9) на угловую скорость якоря, получим уравнение момента:  . (5.10) . (5.10)или:  . (5.11) . (5.11)Электромагнитный момент Мэм в генераторе направлен против вращения якоря и равен:  . (5.12) . (5.12)При увеличении тока Iа возрастает электромагнитный момент, а следовательно, момент и мощность, поступаемая от двигателя. 5.2 Характеристики генератора постоянного тока параллельного возбуждения Рабочие свойства электрических машин определяются их характеристиками. Для генераторов постоянного тока основными характеристиками являются характеристики холостого хода, нагрузочная, внешняя, регулировочная. Указанные характеристики определяются при постоянной номинальной частоте вращения якоря (n=nном=соnst). Они могут быть получены как экспериментальным, так и расчетным путем. Самовозбуждение генератора параллельного возбуждения происходит при соблюдении следующих условий: 1) наличия остаточного магнитного потока полюсов; 2) правильного подключения концов обмотки возбуждения или правильного направление вращения. Кроме того, сопротивление цепи возбуждения Rв при данной скорости вращения n должно быть ниже некоторого критического значения или скорость вращения при данном Rвдолжна быть выше некоторой критической величины. Для самовозбуждения достаточно, чтобы остаточный поток составлял 2—3%oт номинального, Остаточный поток такой величины практически всегда имеется в уже работавшей машине. Вновь изготовленную машину или машину, которая по каким-либо причинам размагнитилась, необходимо намагнитить, пропуская через обмотку возбуждения ток от постороннего источника. При соблюдении необходимых условий процесс самовозбуждения протекает следующим образом. Небольшая ЭДС, индуктируемая в якоре остаточным магнитным потоком, вызывает в обмотке возбуждения малый ток iв. Этот ток вызывает увеличение потока полюсов, а следовательно увеличение ЭДС, которая в свою очередь обусловливает дальнейшее увеличение тока возбуждения iв , и т. д. Такой лавинообразный процесс самовозбуждения продолжается до тех пор, пока напряжение генератора не достигнет установившегося значения. Если подключение концов обмотки возбуждения или направление вращения неправильны, то возникает ток возбуждения iв обратного направления, вызывающий ослабление остаточного потока и уменьшение ЭДС, вследствие чего самовозбуждение невозможно. Тогда необходимо переключить концы обмотки возбуждения или изменить направление вращения. В соблюдении этих условий можно убедиться, следя с помощью вольтметра с малым пределом измерения напряжения якоря при замыкании и размыкании цепи возбуждения. Рассмотрим подробнее процесс самовозбуждения при холостом ходе. На рисунке 5.2 кривая 1 представляет собой характеристику холостого хода, а прямая 2 — так называемую характеристику цепи возбуждения или зависимость:  (5.13) (5.13)где Rв=const — сопротивление цепи возбуждения, включая сопротивление регулировочного реостата. В процессе самовозбуждения  и напряжение на концах цепи возбуждения и напряжение на концах цепи возбуждения (5.14) (5.14)где Lв— индуктивность цепи возбуждения. Напряжение якоря при холостом ходе изображается на рисунке 11.2 кривой 1 и определяется по формуле:  (5.15) (5.15)Но в генераторе параллельного возбуждения  . Поэтому разность ординат кривой 1 и прямой 2 на рисунке 5.2 составляет . Поэтому разность ординат кривой 1 и прямой 2 на рисунке 5.2 составляет  и характеризует скорость и направление изменения iв. Если прямая 2 проходит ниже кривой 1, то и характеризует скорость и направление изменения iв. Если прямая 2 проходит ниже кривой 1, то  ток возбуждения iв растет и машина самовозбуждается до напряжения, соответствующего на рисунке 5.2 точке пересечения кривой 1 и прямой 2, в которой ток возбуждения iв растет и машина самовозбуждается до напряжения, соответствующего на рисунке 5.2 точке пересечения кривой 1 и прямой 2, в которой  и рост iв поэтому прекратится. и рост iв поэтому прекратится.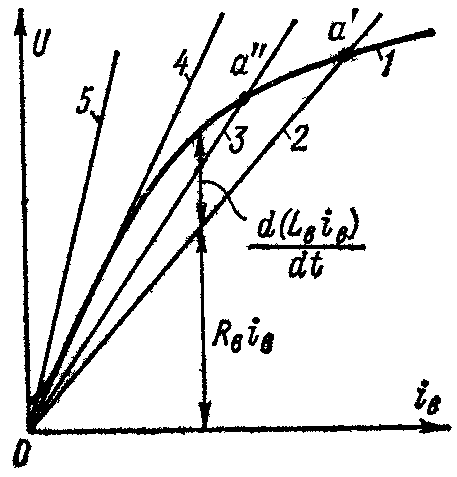 |