Практическая 9. Учебный исполнитель Робот на уроках информатики
 Скачать 0.69 Mb. Скачать 0.69 Mb.
|

|
Методическая разработка по информатике. Тема: «Учебный исполнитель Робот на уроках информатики» Класс: 6 Пояснительная записка Цель разработки: изучить возможности программирования на примере конкретного исполнителя Робот с использованием среды КУМИР; дать практические навыки работы с исполнителем. Методическая разработка составлена для проведения уроков информатики в 6 классах. Практика на компьютере: работа с учебным исполнителем алгоритмов; составление линейных, ветвящихся и циклических алгоритмов управления исполнителем; составление алгоритмов со сложной структурой; использование вспомогательных алгоритмов (процедур, подпрограмм). Учащиеся должны знать: что такое исполнитель; СКИ Робота, среду исполнителя Робот; что такое алгоритм ; в чем состоят основные свойства алгоритма; способы записи алгоритмов: блок-схемы, учебный алгоритмический язык; основные алгоритмические конструкции: следование, ветвление, цикл; структуры алгоритмов; ⇒ назначение вспомогательных алгоритмов; технологии построения сложных алгоритмов: Учащиеся должны уметь: понимать описания алгоритмов на учебном алгоритмическом языке; выполнить трассировку алгоритма для известного исполнителя; составлять линейные, ветвящиеся и циклические алгоритмы управления исполнителя Робот; выделять подзадачи; определять и использовать вспомогательные алгоритмы. Тематический план уроков
Занятие 1 (2 часа) Урок 1. Исполнитель Робот. Система команд исполнителя. План урока. Описание СКИ исполнителя, среды исполнителя. 2.Разбор типичных алгоритмов Робота. Ход урока. Рассмотрим описание исполнителя. Среда исполнителя: Исполнитель Робот умеет перемещаться по лабиринту, начерченному на плоскости, разбитой на клетки. СКИ Робота: простые команды: вверх, вниз, влево, вправо, закрасить. Команды логические: (проверки условия) сверху свободно снизу свободно слева свободно справа свободно. Логические связки: И,НЕ, ИЛИ: Пример:(Не слева свободно) или (не справа свободно) Команда ветвления: команда цикла: если условие то нц пока условие серия команд серия команд все кц Порядок создания алгоритма: 1.Командами Инструменты -Редактировать стартовую обстановку нарисовать на поле Робота стены и установить Робота в начальное положение. 2.Командами Робот- Сменить стартовую обстановку сохранить новую обстановку. 3.Командами Вставка- Использовать Робот указать исполнителя. 4.В окне документа записать алгоритм, используя меню Вставка. 5.Командами Выполнение –выполнить непрерывно (или по шагам) запустить алгоритм. 6.Рассмотреть результат выполнения алгоритма и при необходимости произвести его отладку. Занятие 1 (2 часа) Урок 2. Практическая работа « Составление линейных алгоритмов». Задания: 1.Робот в произвольной точке поля. Закрасить клетку сверху, снизу и справа от исходного положения. Робот в произвольной точке поля. Передвинуть Робот на 4 клетки вправо, закрасив их. Создайте новую стартовую обстановку, нарисовав на поле квадрат со стороной 4 клетки. Сохраните обстановку как стартовую. Создайте новую стартовую обстановку, нарисовав на поле коридор с проходами в стенах. Сохраните обстановку как obst2.fil. Смените стартовую обстановку на вновь созданную. Д/З: выучить СКИ Робота, скопировать и установить на домашний ПК программную оболочку Кумир. Занятие 2 (2 часа) Урок 1. Тема: Ветвление и последовательная детализация алгоритма. Разбор задач КИМов с использованием исполнителя Робот.  кон использовать Робот алг ким нач если не снизу свободно то вправо все если не снизу свободно то вправо все е  сли не снизу свободно сли не снизу свободното вправо все кон Практическая работа Составление и отладка алгоритмов ветвления Занятие 3. Циклические алгоритмы. Урок 1-2 Цель: раскрыть сущность понятия цикла в алгоритмах, показать формы записи циклов алгоритмах, дать навыки создания и записи циклических алгоритмов. Практическая работа Составление и отладка циклических алгоритмов 1.Составьте алгоритм, закрашивающий все внутренние клетки, прилегающие к стене. и 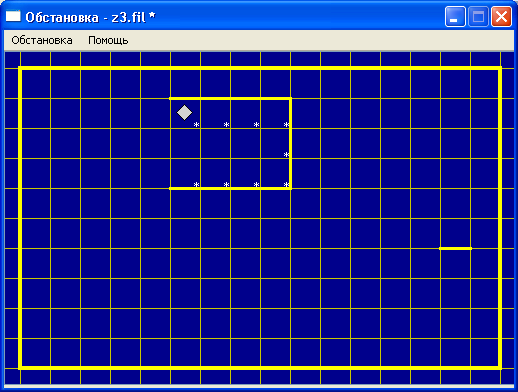 спользовать Робот спользовать Роботалг нач нц пока справа свободно закрасить; вправо кц нц пока снизу свободно закрасить; вниз кц нц пока не снизу свободно закрасить; влево кц кон 2.Составить алгоритм, закрашивающий все клетки между Роботом и стеной. Расстояние до стены неизвестно. и 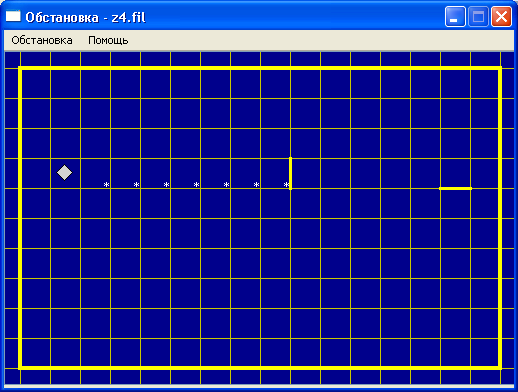 спользовать Робот спользовать Роботалг нач нц пока справа свободно вправо; закрасить кц кон 3.Составить алгоритм, закрашивающий все клетки, находящиеся между двумя стенами. использовать Робот алг уч3 нач нц пока (не сверху свободно) или (не снизу свободно) вправо если (не сверху свободно) и (не снизу свободно) т 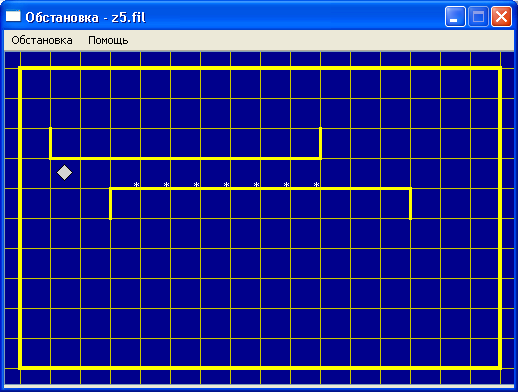 о озакрасить все кц кон 4.Составить алгоритм, закрашивающий все клетки вокруг прямоугольной стены. алг уч4 нач закрасить;вверх нц пока не справа свободно з 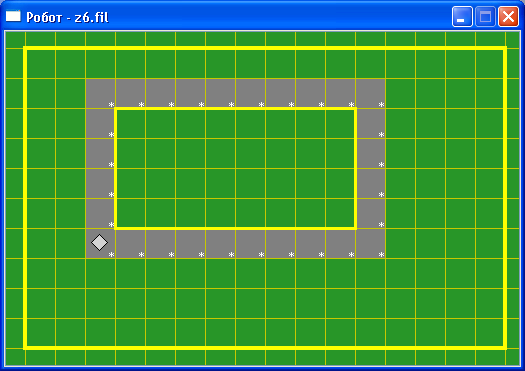 акрасить;вверх; акрасить;вверх; кц закрасить;вправо нц пока не снизу свободно закрасить;вправо; кц закрасить;вниз нц пока не слева свободно закрасить;вниз; кц закрасить;влево нц пока не сверху свободно закрасить; влево; кц кон  использовать Робот алг уч5 нач вправо нц пока не снизу свободно закрасить; вправо кц закрасить; вниз нц пока слева свободно закрасить; влево кц нц пока не слева свободно закрасить; вниз кц закрасить;влево;закрасить; вверх; н 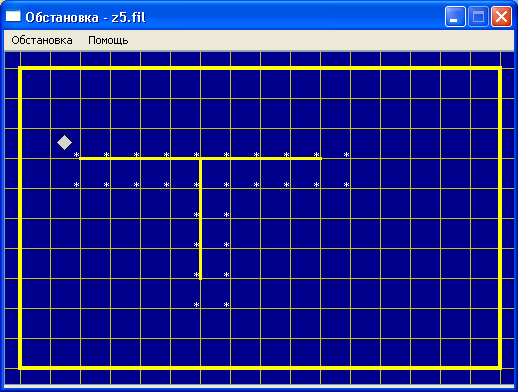 ц пока сверху свободно ц пока сверху свободнозакрасить; вверх кц нц пока не сверху свободно закрасить; влево кц кон  Занятие 4 Урок 1-2 Контрольная работа «Составление алгоритма в среде исполнителя Робот». Цель: проверить полученные знания по созданию и умению анализировать алгоритмы в программной среде Кумир. Задания для контрольной работы делятся по уровням сложности и включает в себя 2 задачи с исполнителем Робот (1 и 2 задача –на ветвление и циклы). Примеры текстов заданий приводятся в приложении. Исходные и конечные обстановки и созданные алгоритмы записываются в виде файла. Оценка выставляется соответственно уровню сложности задания. Ученик вправе сам выбрать тип задания. 3.Список использованных материалов 1.Авербух А.В., Гисман В.Бю, Лебедев Г.В., Изучение основ информатики и вычислительной техники. Пособие для учителя, М., Просвещение, 2001г. 2.Авдошин С.М., Ахметсафина Р.З., Максименкова О.В. и др.ГИА Информатика, Учеьно-справочные материалы для 9 класса, М., Бином, 2011г. 3.Кушниренко А.Г., Лебедев Г.В. и др., Основы информатики и вычислительной техники, пробный учебник для средних заведений, М.,»Просвещение», 2000г. 4.Лысенко Ф.Ф., Евич Л.Н., Информатика и ИКТ 9 класс Подготовка к ГИА, учебно-методическое пособие, Ростов на Дону, Легион-М, 2010г. 5. Семакин И.Г., Т.Ю. Шеина. Методическое пособие по преподаванию курса «Информатика и ИКТ» в основной школе. М.: БИНОМ. Лаборатория знаний, 2006. 6. Семакин И.Г., Залогова Л.А., Русаков С.В., Шестакова Л.В. Информатика и ИКТ : учебник для 9 класса. 7.Информатика и ИКТ : задачник-практикум / Под ред. И.Г. Семакина, Е.К. Хеннера. М.: БИНОМ. Лаборатория знаний, 2007. 8. Семакин И.Г., Т.Ю. Шеина. Методическое пособие по преподаванию курса «Информатика и ИКТ» в основной школе. М.: БИНОМ. Лаборатория знаний, 2006. 9. Семакин И.Г., Г.С. Вараксин. Структурированный конспект курса «Информатика и ИКТ» в основной школе (в редакционной подготовке). 10. http://um-razum.ru/informatika 11.http://4ege.ru/gia-in-9/1269-posobiya-dlya-podgotovki-k-gia-po informatike.html 12..http://informik.ucoz.ru/ 13..http://univer2.ru/informatika_algoritm.htm 14.http://kpolyakov.narod.ru/school/robots/robots.htm 15.http://www.fipi.ru/view/sections/170/docs/ Приложение. Пример контрольной работы 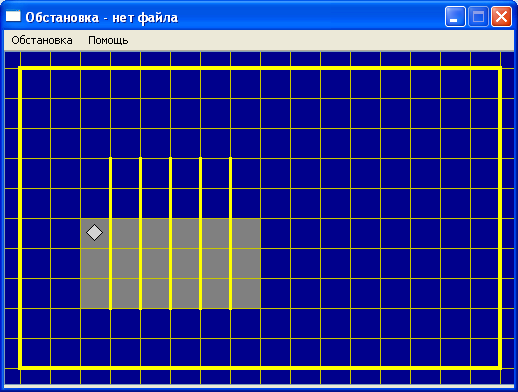 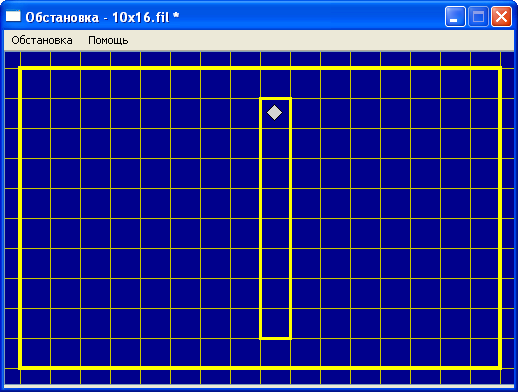    Вариант 1. Дано: Робот находится в верхней клетке узкого вертикального коридора щириной в 1 клетку, произвольной длины. Надо: все клетки коридора закрашены, Робот в исходном положении. дано: Робот в точке А. Надо: Робот в точке В, закрашены указанные клетки. Вариант 2. дано:сверху и справа Робота стены, образующие угол. надо: закрасить все указанные клетки, Робот в исходном положении. дано: Робот в верхнем левом углу прямоугольника, огороженным стенами. надо:Робот в точке В. |