Учебнометодический комплекс для заочного обучения с применением дистанционных технологий для студентов специальности 190702 Организация и безопасность дорожного движения
 Скачать 5.75 Mb. Скачать 5.75 Mb.
|

8.1.Назначения и принципы работыСпутниковая радионавигационная система или, как она еще называется, глобальная система определения местоположения GPS (Global Position System) обеспечивает высокоточное определение координат и скорости объектов в любой точке земной поверхности, в любое время суток, в любую погоду, а также точное определение времени. Первоначально предполагалось использовать систему GPS только в навигационных целях, но исследования, проведенные учеными Массачусетского технологического института в 1976 - 1978г.г., показали возможность геодезического применения GPS, т.е. определения координат с миллиметровой точностью. С того времени началось использование системы для выполнения геодезических измерений. В околоземном пространстве развернута сеть искусственных спутников Земли (ИСЗ), равномерно “покрывающих” всю земную поверхность (рис.8.1). Орбиты ИСЗ вычисляются с очень высокой точностью, поэтому в любой момент времени известны координаты каждого спутника. Радиопередатчики спутников непрерывно излучают сигналы в направлении Земли. Эти сигналы принимаются GPS-приемником, находящемся в некоторой точке земной поверхности, координаты которой нужно определить. В приемнике измеряется время распространения сигнала от ИСЗ и вычисляется дальность “спутник-приемник” (радиосигнал, как известно, распространяется со скоростью света). Поскольку для определения местоположения точки нужно знать три координаты (плоские координаты X, Y и высоту H), то в приемнике должны быть измерены расстояния до трех различных ИСЗ. Очевидно, при таком методе радионавигации (он называется беззапросным) точное определение времени распространения сигнала возможно лишь при наличии синхронизации временных шкал спутника и приемника. Поэтому в состав аппаратуры ИСЗ и приемника входят эталонные часы (стандарты частоты), причем точность спутникового эталона времени исключительно высока (долговременная относительная стабильность частоты обеспечивается на уровне 10-13 - 10-15 за сутки). Бортовые часы всех ИСЗ синхронизированы и привязаны к так называемому “системному времени”. Эталон времени GPS- приемника менее точен, чтобы чрезмерно не повышать его стоимость. На практике в измерениях времени всегда присутствует ошибка, обусловленная несовпадением шкал времени ИСЗ и приемника. По этой причине в приемнике вычисляется искаженное значение дальности до спутника или “псевдодальность”. Измерения расстояний до всех ИСЗ, с которыми в данный момент работает приемник, происходит одновременно. Следовательно, для всех измерений величину временного несоответствия можно считать постоянной. Для их определения необходимо выполнить измерения псевдодальностей не до трех, а до четырех спутников. В результате обработки этих измерений в приемнике вычисляются координаты (X,Y и H) и точное время. Если приемник установлен на движущемся объекте и наряду с псевдодальностями измеряет доплеровские сдвиги частот радиосигналов, то может быть вычислена и скорость объекта. Таким образом, для выполнения необходимых навигационных определений надо обеспечить постоянную видимость с нее, как минимум, четырех спутников. После полного развертывания созвездия ИСЗ в любой точке Земли могут быть видны от 5 до 12 спутников в произвольный момент времени. Современные GPS-приемники имеют от 5 до 12 каналов, т.е. могут одновременно принимать сигналы от такого количества ИСЗ. Избыточные измерения (сверх четырех) позволяют повысить точность определения координат и обеспечить непрерывность решения навигационной задачи. 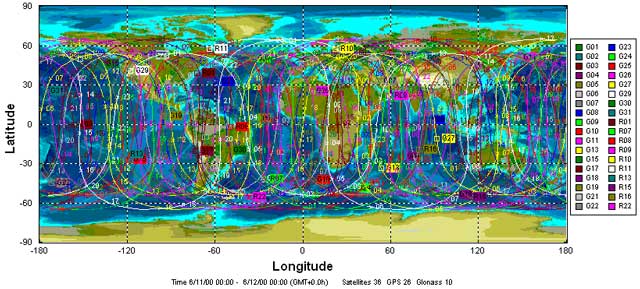 Рисунок 8.1. Орбиты спутников GPS В состав системы входят: - созвездие ИСЗ (космический сегмент); - сеть наземных станций слежения и управления (сегмент управления); - собственно GPS-приемники (аппаратура потребителей). 8.2. Источники ошибок и основные сегментыСостоит из 26 спутников (21 основной и 5 запасных), которые обращаются на 6 орбитах (Рис. 8.1). Плоскости орбит наклонены на угол около 55 к плоскости экватора и сдвинуты между собой на 60 по долготе. Радиусы орбит - около 26 тыс. км, а период обращения - половина звездных суток (примерно 11 ч. 58 мин.). На борту каждого спутника имеется 4 стандарта частоты (два цезиевых и два рубидиевых - для целей резервирования), солнечные батареи, двигатели корректировки орбит, приемо-передающая аппаратура, компьютер. Передающая аппаратура спутника излучает синусоидальные сигналы на двух несущих частотах: L1=1575,42 МГц и L2=1227,6 МГц. Перед этим сигналы модулируются так называемыми псевдослучайными цифровыми последовательностями (точнее, эта процедура называется фазовой манипуляцией). Причем частота L1 модулируется двумя видами кодов: C/A-кодом (код свободного доступа) и P-кодом (код санкционированного доступа), а частота L2- только P-кодом. Кроме того, обе несущие частоты дополнительно кодируются навигационным сообщением, в котором содержатся данные об орбитах ИСЗ, информация о параметрах атмосферы, поправки системного времени Кодирование излучаемого спутником радиосигнала преследует несколько целей: обеспечение возможности синхронизации сигналов ИСЗ и приемника; создание наилучших условий различения сигнала в аппаратуре приемника на фоне шумов (доказано, что псевдослучайные коды обладают такими свойствами); реализация режима ограниченного доступа к GPS, когда высокоточные измерения возможны лишь при санкционированном использовании системы. Кроме того, для снижения точности определения координат несанкционированными пользователями предусмотрен так называемый “режим выборочного доступа” SA (Selective Availability). При включении этого режима в навигационное сообщение намеренно вводится ложная информация о поправках к системному времени и орбитах ИСЗ, что приводит к снижению точности навигационных определений примерно в 3 раза. Сегмент управления Содержит главную станцию управления (авиабаза Фалькон в шт. Колорадо), пять станций слежения, расположенных на американских военных базах на Гавайских островах, островах Вознесения, Диего - Гарсия, Кваджелейн и Колорадо-Спрингс и три станции закладки:острова Вознесения, Диего - Гарсия, Кваджелейн (рис. 8.2). Кроме того, имеется сеть государственных и частных станций слежения за ИСЗ, которые выполняют наблюдения для уточнения параметров атмосферы и траекторий движения спутников. Собираемая информация обрабатывается в суперкомпьютерах и периодически передается на спутники для корректировки орбит и обновления навигационного сообщения. Аппаратура потребителей В аппаратуре потребителя (GPS-приемнике) принимаемый сигнал декодируется, т.е. из него выделяются кодовые последовательности C/A либо C/A и P, а также служебная информация. Полученный код сравнивается с аналогичным кодом, который генерирует сам GPS-приемник, что позволяет определить задержку распространения сигнала от спутника и таким образом вычислить псевдодальность. 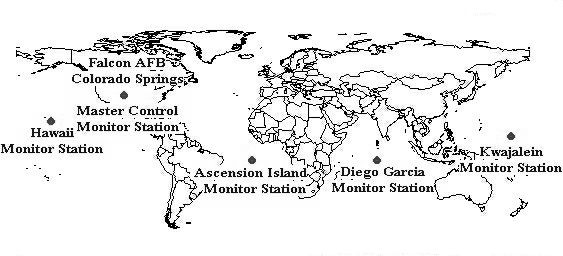 Рисунок 8.2. Наземные станции слежения за спутниками После захвата сигнала спутника аппаратура приемника переводится в режим слежения, т.е. в БПС поддерживается синхронизм между принимаемым и опорным сигналами. Процедура синхронизации может выполняться: по C/A-коду (одночастотный кодовый приемник), по Р – коду (двухчастотный кодовый приемник), по C/A-коду и фазе несущего сигнала (одночастотный фазовый приемник), по Р - коду и фазе несущего сигнала (двухчастотный фазовый приемник). Используемый в GPS-приемнике способ синхронизации сигналов является едва ли не важнейшей его характеристикой. Источники ошибок На точность определения координат существенное влияние оказывают ошибки, возникающие при выполнении процедуры измерений. Природа этих ошибок различна. Неточное определение времени. При всей точности временных эталонов ИСЗ существует некоторая погрешность шкалы времени аппаратуры спутника. Она приводит к возникновению систематической ошибки определения координат около 0.6 м. Ошибки вычисления орбит. Появляются вследствие неточностей прогноза и расчета эфемерид спутников, выполняемых в аппаратуре приемника. Эта погрешность также носит систематический характер и приводит к ошибке измерения координат около 0.6 м. Инструментальная ошибка приемника. Обусловлена, прежде всего, наличием шумов в электронном тракте приемника. Отношение сигнал/шум приемника определяет точность процедуры сравнения принятого от ИСЗ и опорного сигналов, т.е. погрешность вычисления псевдодальности. Наличие данной погрешности приводит к возникновению координатной ошибки порядка 1,2 м. Многопутностьраспространения сигнала. Появляется в результате вторичных отражений сигнала спутника от крупных препятствий, расположенных в непосредственной близости от приемника. В результате воздействия этого фактора ошибка определения псевдодальности может увеличиться на 2м. Ионосферные задержки сигнала. Ионосфера – это ионизированный атмосферный слой в диапазоне высот 50 – 500 км, который содержит свободные электроны. Наличие этих электронов вызывает задержку распространения сигнала спутника, которая прямо пропорциональна концентрации электронов и обратно пропорциональна квадрату частоты радиосигнала. Для компенсации возникающей при этом ошибки определения псевдодальности используется метод двухчастотных измерений на частотах L1 и L2 (в двухчастотных приемниках). Линейные комбинации двухчастотных измерений не содержат ионосферных погрешностей первого порядка. Кроме того, для частичной компенсации этой погрешности может быть использована модель коррекции, которая аналитически рассчитывается с использованием информации, содержащейся в навигационном сообщении. При этом величина остаточной немоделируемой ионосферной задержки может вызывать погрешность определения псевдодальности около 10м. Тропосферные задержки сигнала. Тропосфера – самый нижний от земной поверхности слой атмосферы (до высоты 8 – 13км). Она также обуславливает задержку распространения радиосигнала от спутника. Величина задержки зависит от метеопараметров (давления, температуры, влажности), а также от высоты спутника над горизонтом. Компенсация тропосферных задержек производится путем расчета математической модели этого слоя атмосферы. Необходимые для этого коэффициенты содержатся в навигационном сообщении. Тропосферные задержки вызывают ошибки измерения псевдодальностей в 1м. Геометрическое расположение спутников. Типичное среднее значение PDOP колеблется от 4 до 6. |