Учебное пособие по ТЗИ. Учебное пособие для студентов специальностей Организация и технология защиты информации
 Скачать 7.5 Mb. Скачать 7.5 Mb.
|

4.3. Средства наблюдения в радиодиапазонеРадиолокационное и радиотеплолокационное наблюдение осуществляется в радиодиапазоне электромагнитных волн с помощью способов и средств радиолокации и радиотеплолокации. Для получения радиолокационного изображения в радиолокаторе формируется зондирующий узкий, сканирующий по горизонтали и вертикали, луч электромагнитной волны, которым облучается пространство с объектом наблюдения. Отраженный от поверхности объекта радиосигнал принимается радиолокатором и модулирует электронный луч электронно-лучевой трубки его индикатора, который, перемещаясь, синхронно с зондирующим лучом «рисует» на экране изображение объекта. Принцип радиолокационного наблюдения показан на рис. 4.4. 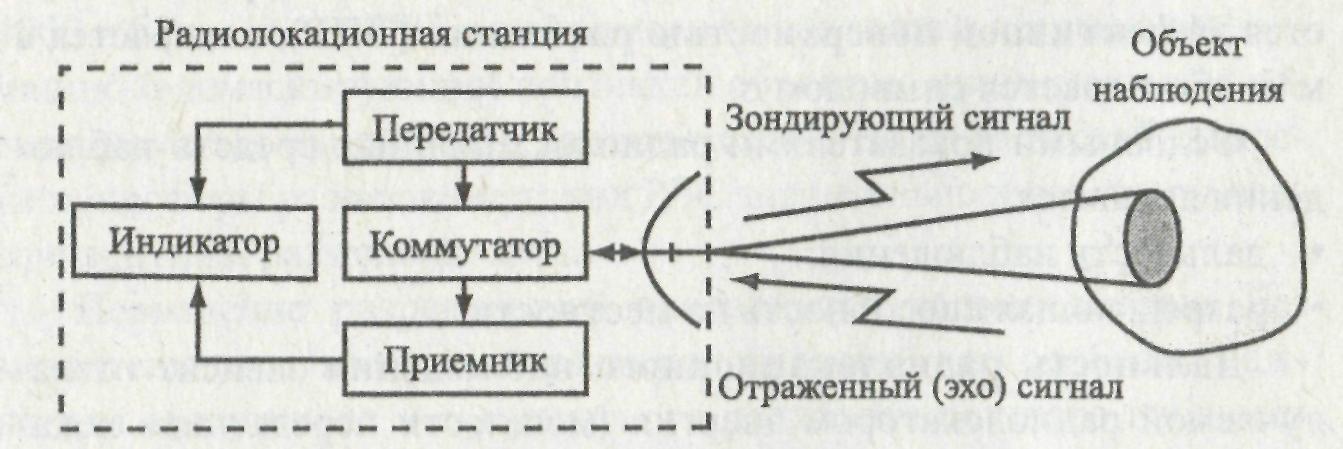 Рис. 4.4. Принцип радиолокационного наблюдения Так как в радиолокаторе для передачи и приема используется одна и та же антенна, то при излучении коммутатор подключает к антенне передатчик, а при приеме – приемник. Момент излучения фиксируется на индикаторе РЛС в качестве точки отсчета для измерения дальности нахождения объекта. Расстояние до объекта равно половине пути, который проходит электромагнитная волна за время между моментами излучения зондирующего сигнала и приема отраженного от объекта сигнала. Радиолокационное изображение существенно отличается от изображения в оптическом диапазоне. Различие обусловлено разными способами получения изображения и свойствами отражающей поверхности объектов в оптическом диапазоне и радиодиапазоне. Отражательная способность объекта в радиодиапазоне зависит не только от его геометрических размеров, но и от электропроводности его поверхности и конфигурации поверхности по отношению к направлению зондирующего луча радиолокатора. Если участок электропроводящей поверхности (металла, пленки воды) перпендикулярен направлению падающей на него электромагнитной волны радиолокационной станции, то большая часть ее энергии переотразится в сторону приемной антенны радиолокатора и будет визуализирована на его экране в виде яркой («блестящей») точки. При увеличении угла между зондирующим лучом и плоскостью участка поверхности объекта энергия поля у приемной антенны локатора будет уменьшаться вплоть до ее отсутствия. Следовательно, изображения на экране радиолокатора одного и того же объекта будут различаться при наблюдении его под разными углами. Отражающая способность объекта со сложной конфигурацией поверхности оценивается показателем, который называется эффективной поверхностью рассеяния (ЭПР), измеряется в квадратных метрах и обозначается символом . Основными показателями радиолокационных средств наблюдения являются:
Дальность радиолокационного наблюдения зависит от излучаемой радиолокатором энергии (мощности передатчика локатора) и характеристик среды распространения электромагнитной волны. Ослабление электромагнитной волны зависит от дальности распространения и поглощения ее в среде. Чем короче длина волны, тем больше она затухает в атмосфере. Но одновременно тем выше может быть обеспечена разрешающая способность радиолокатора на местности. Разрешение радиолокатора на местности определяется величиной пятна, которое создает луч радиолокационной станции на поверхности объекта или местности. Пятно тем меньше, чем уже диаграмма направленности антенны радиолокатора. Ширина диаграммы направленности антенны, в свою очередь, обусловлена соотношением геометрических размеров конструкции антенны и длины волны. Кроме того, следует иметь в виду, что электромагнитная волна отражается от объекта или его деталей, если их размеры превышают длину волны. Если размеры их значительно меньше, то волна эти объекты огибает. В связи с этими соображениями наиболее широко в радиолокации применяется сантиметровый диапазон с тенденцией перехода в миллиметровый диапазон. Наземные радиолокаторы бывают малой, средней, большой дальности и сверхдальнего действия. РЛС малой дальности применяют для обнаружения людей и транспортных средств на расстоянии в сотни метров, средней – единицы км, большой – десятки км. Точность определения координат наземных РЛС составляет по дальности 10-20% и около градуса по азимуту. Сверхдальние (загоризонтные) РЛС используют эффект, открытый в 60-е годы Н. И. Кабановым. Этот эффект состоит в распространении радиоволн в декаметровом диапазоне на большие расстояния не только в прямом, но и обратном направлениях. Отражаясь от объектов на земной поверхности на удалении 800…4000 и более км от РЛС, электромагнитные волны, несущие информацию о демаскирующих признаках объектов, принимаются и регистрируются приемником радиолокатора. Но из-за нестабильности ионосферы разрешение таких РЛС значительно хуже, чем у надгоризонтных радиолокаторов. Повышение разрешающей способности радиолокаторов без значительного увеличения размеров антенны, что особенно важно для воздушного и космического радиолокационного наблюдения, обеспечивается в радиолокационных станциях бокового обзора (РЛС БО). Они размещаются на самолетах и разведывательных КА. В РЛС БО применяются два вида антенн: радиолокационные вдольфюзеляжные антенны (РФА) и радиолокационные с синтезированной апертурой (РСА). Элементы антенны первого вида размещают на фюзеляже самолета с обеих его сторон или в подвесном контейнере-обтекателе. Благодаря такому расположению длина антенны может достигать 10…15 м. Такая антенна создает узкую (в доли градусов) диаграмму направленности в горизонтальной плоскости и широкую – в вертикальной плоскости. Антенна формирует один или два (при обзоре двух сторон) луча, направленных перпендикулярно линии полета самолета V (см. рис. 4.5). 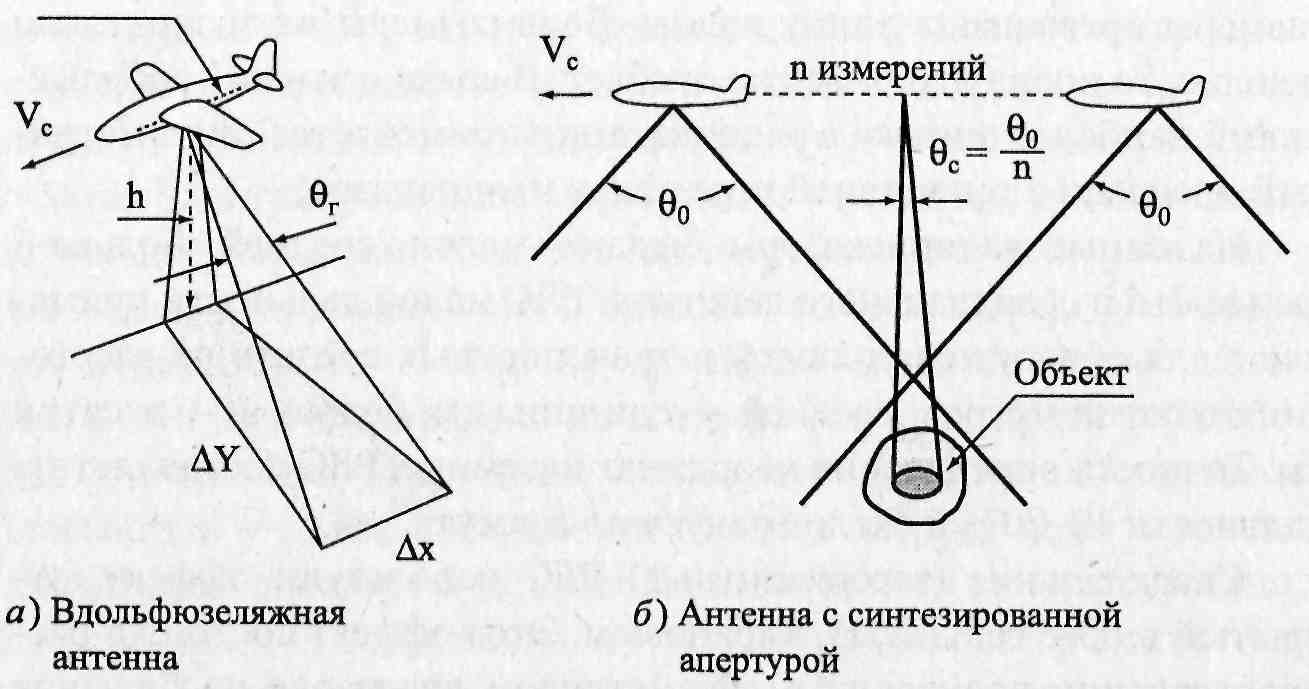 Рис. 4.5. Радиолокационные станции бокового обзора Излученный антенной РЛС БО радиоимпульс облучает участок местности шириной Δx и длиной Δу. При полете самолета по прямолинейной траектории луч РЛС перемещается вместе с самолетом, а на индикаторе РЛС формируется изображение полосы местности, параллельной траектории полета самолета. Особенностью бокового обзора является невозможность просмотра полосы местности под самолетом и ухудшение линейного разрешения пропорционально увеличению боковой дальности от самолета. Повышение угловой разрешающей способности РЛС с синтезированной апертурой антенны основано на формировании узкой диаграммы направленности по азимуту с помощью виртуальной антенной решетки. В РЛС применяется небольшая антенна, широкая диаграмма направленности которой неподвижна относительно самолета и направлена на земную поверхность перпендикулярно линии полета. При полете самолета антенна РЛС последовательно занимает в пространстве положения на прямой траектории полета самолета, эквивалентные положениям элементов гипотетической антенной решетки. В результате запоминания сигналов, последовательно принимаемых антенной в n точках траектории полета самолета, и их когерентного суммирования достигается эффект, аналогичный приему n элементами физической антенной решетки. Размер решетки (синтезированной апертуры) соответствует длине участка траектории, на котором производится запоминание и когерентное суммирование сигналов. Ширина диаграммы направленности в горизонтальной плоскости синтезированной антенны РЛС в n раз меньше ширины диаграммы физической антенны, установленной на самолете или КА. Используя этот метод, можно увеличить разрешающую способность РЛС по азимуту в 100 и более раз. При наблюдении земной поверхности с помощью РЛС с РСА предъявляются жесткие требования к прямолинейности траектории полета самолета, к стабильности амплитудно-фазовых характеристик приемно-передающего тракта РЛС и устройств обработки сигналов, параметров среды распространения и характеристик отражения радиоволн наблюдаемыми объектами. Для цифровой обработки сигналов требуется также высокая производительность и большой объем памяти бортового компьютера. Наряду с тенденцией уменьшения длины волны радиолокатора для повышения его разрешающей способности применяются РЛС в дециметровом и метровом диапазонах волн. Главное преимущество волн с более низкими частотами – существенное увеличение их проникающей способности. Для сухой почвы она может достигать нескольких метров. Это позволяет наблюдать сигналы, отраженные не только от поверхности Земли или объекта, но и различными неоднородностями в глубине. Появляются дополнительные демаскирующие признаки объектов и возможность их наблюдения при маскировке, например, естественной растительностью. Эти свойства электромагнитной волны реализуются в радиолокационной станции подповерхностной радиолокации, называемой георадаром. Антенна георадара излучает сверхкороткие электромагнитные импульсы длительностью в доли и единицы наносекунды. Центральная частота и длительность импульса определяются исходя из необходимой глубины зондирования и разрешающей способности георадара. В диапазоне 0-500 МГц глубина зондирования составляет единицы м, а разрешающая способность – десятки см. На более высоких частотах (около 1000 МГц) глубина зондирования уменьшается до долей м, но разрешающая способность увеличивается до единиц см. Георадары активно используются во многих сферах деятельности – в геологии, строительстве, экологии, оборонной промышленности и др., в том числе при поиске тайников, захоронений, подкопов. |