Реферат Управление сложными системами. Реферат Астрелин М.А (Баева). Управление сложными системами. Типы управления
 Скачать 82.26 Kb. Скачать 82.26 Kb.
|

|
МИНОБРНАУКИ РОССИИ ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧЕРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ «ВОРОНЕЖСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ» Факультет прикладной математики, информатики и механики Кафедра Математических методов, исследований, операций Реферат На тему «Управление сложными системами. Типы управления» По курсу «Управление организационными системами» 38.04.05 Информационная бизнес-аналитика Обучающиеся: Астрелин М.А., Карлов С. Отчество 1 курса 15 группы Руководитель Баева Н.Б К.э.н., профессор Воронеж 2021 ОглавлениеВведение 3 Основные понятия теории управления организационными системами 4 Управление сложными системами. Типы управления 6 Введение Одной из характерных тенденций развития общества является появление чрезвычайно сложных (больших) систем. Основными причинами этого являются: непрерывно увеличивающаяся сложность технических средств, применяемых в народном хозяйстве; необходимость в повышении качества управления как техническими, так и организационными системами (предприятие, отрасль, государство и др.); расширяющаяся специализация и кооперирование предприятий - основные тенденции развития народного хозяйства. В отличие от традиционной практики проектирования простых систем при разработке крупных автоматизированных, технологических, энергетических, аэрокосмических, информационных и других сложных комплексов возникают проблемы, меньше связанные с рассмотрением свойств и законов функционирования элементов, а больше - с выбором наилучшей структуры, оптимальной организации взаимодействия элементов, определением оптимальных режимов их функционирования, учетом влияния внешней среды и т.п. По мере увеличения сложности системы этим комплексным общесистемным вопросам отводится более значительное место. Все это привело к появлению нового - системного - подхода к анализу больших систем. Они часто не поддаются полному описанию и имеют многогранные связи между отдельными функциональными подсистемами, каждая из которых может представлять собой также большую систему. В основе системного подхода лежит специальная теория - теория управления организационными системами. Основные понятия теории управления организационными системами Система ( S ) - совокупность элементов, вступающих в отношения друг с другом и обладающих целостностью и единством. Элемент (e∈ E ) – неделимая часть системы, определяемая на основе заранее введенных общих принципов, для которых известны основные характеристики. E – множество элементов системы. Элемент является пределом разбиения системы с точки зрения решения конкретной задачи и поставленной цели. 0 Подсистема – совокупность элементов, находящихся между собой в более тесных связях, принадлежащих системе в целом и способных выполнять относительно независимые функции, подцели. Система может быть разделена на элементы не сразу, а последовательным расчленением на подсистемы, которые представляют собой компоненты более крупные, чем элементы, и в то же время более детальные, чем система в целом. Каждый элемент системы характеризуется некоторым набором свойств. Под свойством элемента ( P(e) ) понимают характеристику, которая может быть определена с помощью набора операций или измерена с помощью какого-то инструмента. При выделении элементов необходимо придерживаться следующих принципов: – принцип целесообразности. Необходимо оценивать влияние элемента на конечную цель исследования системы. – принцип минимальной достаточности. Для описания оригинала любой природы в виде системы используется минимально необходимое число элементов, обеспечивающее достижение цели исследования. – принцип «часть-целое». Элемент системы и система в целом должны быть совместимы. Множество свойств системы S будем обозначать P(S). Тогда справедливо следующее включение P(e) ⊆ P(S). Управление сложными системами. Типы управления Сложная система — составной объект, части которого можно рассматривать как системы, закономерно объединенные в единое целое в соответствии с определенными принципами или связанные между собой заданными отношениями. Сложную систему можно расчленить (не обязательно единственным образом) на конечное число частей, называемое подсистемами; каждую такую подсистему (высшего уровня) можно в свою очередь расчленить на конечное число более мелких подсистем и т. д., вплоть до получения подсистем первого уровня, так называемых элементов сложной системы, которые либо объективно не подлежат расчленению на части, либо относительно их дальнейшей неделимости имеется соответствующая договоренность. Подсистема, таким образом, с одной стороны, сама является сложной системой из нескольких элементов (подсистем низшего уровня), а с другой стороны — элементом системы старшего уровня. В каждый момент времени элемент сложной системы находится в одном из возможных состояний; из одного состояния в другое он переходит под действием внешних и внутренних факторов. Под внешней средой понимается совокупность объектов, не являющихся элементами данной сложной системы, но взаимодействие с которыми учитывают при ее изучении. Элементы сложной системы функционируют не изолированно друг от друга, а во взаимодействии: свойства одного элемента в общем случае зависят от условий, определяемых поведением других элементов; свойства сложной системы в целом определяются не только свойствами элементов, но и характером взаимодействия между ними (две сложные системы, состоящие из попарно одинаковых элементов, которые, однако, взаимодействуют между собой различным образом, рассматривают как две различные системы). Система называется устойчивой, если она сохраняет тенденцию стремления к тому состоянию, которая наиболее соответствует целям системы, целям сохранения качества без изменения структуры или не приводящим к сильным изменениям структуры системы на некотором заданном множестве ресурсов (например, на временном интервале). Понятие «сильное изменение» каждый раз должно быть конкретизировано, детерминировано. Для того чтобы существовать и поддерживать внутренний и внешний баланс, система нуждается в управлении. Управление – совокупность действий, направленных от субъекта управления к объекту (ОУ) и обеспечивающих движение системы от некоторого начального состояния 0 t к конечному T , при котором достигается цель. Задача субъекта управления (СУ) состоит в выработке управляющих воздействий, приводящих ОУ к цели. Различают иерархический и гетерархический принципы управления. Для первого характерно управление из единого центра, занимающего вершину в иерархии компонентов системы. Второй принцип управления состоит в множественности центров управления, находящихся на разных этажах системы. Управляемые таким образом системы более гибки и активны. Большинство таких систем относятся к живым, сложным и вероятностным. Среди организаций таковыми являются матричные и свободные организации. 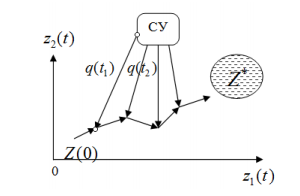 Схема 1 – Управление системой Классификация типов управления проводится по виду связи между воздействием на систему и ее реакцией на это воздействие. Выделяют три типа управления сложными системами: - жесткое управление или управление без обратной связи; - управление с обратной связью; - адаптивное управление. Жесткое управление характеризуется безукоризненно точным выполнением управляющих воздействий СУ (поток X), даже если отклонение от предписаний СУ привело бы к более быстрому и/или эффективному достижению цели ОУ (схема 2). 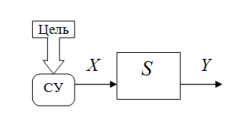 Схема 2 - Жесткое управление Жесткое управление реализуется в предположении о полной определенности условий внешней среды. Примером системы с жестким управлением может служить светофор. Состояния, характеризующие данную систему – свет, горящий на светофоре. Управление заключается в переключение света (изменение состояний) и осуществляется такое управление с заданной периодичностью. Причем, даже если состояние светофора – красный свет для пешеходов, а на дороге не наблюдается движения машин, для пешеходов продолжает гореть красный свет. Управление с обратной связью характеризуется изменением набора управляющих воздействий в зависимости от того, как система реагировала на воздействие в предыдущий момент времени. Тип управления с обратной связью представлен на схеме 3.  Схема 3 - Управление с обратной связью Преимущества системы с обратной связью: гибкость учёт изменения внешних условий; стабильность работы системы на выходе при изменяющемся входе. Недостатки системы с обратной связью: усложнение структуры, появление дополнительных звеньев; более сложная программа. Примером системы с обратной связью может служить автопилот самолета, которому задается курс самолета и автопилот корректирует управление при отклонении от заданного курса. На схеме 4 представлена траектория движения самолета при корректировке автопилотом высоты полета самолета ( H ) в случае отклонения от установленной оптимальной высоты полета ( H* ). Точками на графике обозначены моменты корректирующих воздействий автопилотом. 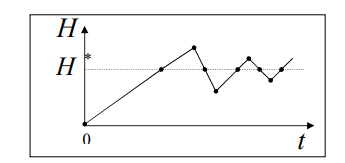 Схема 4 – Траектория движения самолета при корректировке автопилотом Также примерами системы с обратной связью могут быть: автоматическая антиблокировочная система регулирования торможения ABS (фиксируемое отклонение выхода начало проскальзывания колеса при торможении); действия водителя по поддержанию определенных параметров движения автомобиля на маршруте с учётом дорожной обстановки; современные компьютерные системы управления рабочими процессами двигателя с учётом нагрузки, скорости и состава отработавших газов. Адаптивное управление – особый вид управления, характерный для очень сложных систем (биологический организм, государство). Системы адаптивного управления помимо постоянно функционирующей части имеют резервную систему, которая может взять на себя часть или все функции системы управления. Характерной особенностью таких систем является сверх устойчивость – случайные разрушения части системы не выводят из строя всю систему. По характеру изменений в управляющем устройстве системы с адаптивным управлением делят на две большие группы: самонастраивающиеся (изменяются только значения параметров регулятора); самоорганизующиеся (изменяется структура самого регулятора). По способу изучения объекта системы делятся на поисковые; беспоисковые. Адаптивные системы содержат динамическую модель системы, обладающую требуемым качеством. Адаптивные системы с идентификатором делятся по способу управления на: прямой; косвенный (непрямой). При косвенном адаптивном управлении сначала делается оценка параметров объекта, после чего на основании полученных оценок определяются требуемые значения параметров регулятора и производится их подстройка. При прямом адаптивном управлении благодаря учёту взаимосвязи параметров объекта и регулятора производится непосредственная оценка и подстройка параметров регулятора, чем исключается этап идентификации параметров объекта. По способу достижения эффекта самонастройки системы с моделью делятся на: системы с сигнальной (пассивной) адаптацией системы с параметрической (активной) адаптацией системы с алгоритмической адаптацией системы со структурной адаптацией. В системах с сигнальной адаптацией эффект самонастройки достигается без изменения параметров управляющего устройства с помощью компенсирующих сигналов. Системы, сочетающие в себе оба вида адаптации называют комбинированными. При использовании сигнальных воздействий на вход системы подаётся специально организованное внешнее идентифицирующее воздействие, например, в виде изменения задания регулятору. Параметрическое воздействие состоит в изменении параметров настройки регулятора. |