Курсовой. Управляемый выпрямитель
 Скачать 0.55 Mb. Скачать 0.55 Mb.
|

7.1 Защита от аварийных перегрузок автоматическими воздушными выключателямиАварийные перегрузки, сопровождающиеся большими токами, возникают при коротких замыканиях в элементах цепи переменного тока преобразовательной установки, так и при коротких замыканиях в нагрузке и повреждениях отдельных полупроводниковых приборов. В последних случаях протекание сверхтоков через исправные вентили приводит к резкому повышению температуры p–n перехода, что может послужить причиной прожога выпрямительного элемента. Защитная аппаратура при своем срабатывании призвана с минимальным запаздыванием разорвать цепь короткого замыкания и тем самым ограничить электродинамические и термические воздействия аварийного режима на вентили и другие элементы электрической установки. Поскольку наиболее чувствительными к токовым перегрузкам являются полупроводниковые приборы преобразовательной установки, то при всех повреждениях, связанных с протеканием сверхтоков через вентиль (внешние и внутренние короткие замыкания), производится их проверка на термическую стойкость. Устойчивость вентиля к аварийным перегрузкам характеризуется защитным показателем ∫ 𝑖2𝑑𝑡. Полупроводниковый прибор является устойчивым к воздействию сверхтоков, если значение теплового эквивалента при повреждении не превышает защитного показателя. В качестве аппарата, защищающего оборудование электроустановки в аварийных режимах, используются автоматические воздушные выключатели (автоматы), срабатывающие при повышении в них тока до значения установки. Достоинство автоматов в том, что в них совмещены устройство защиты и коммутационный аппарат, включающий и отключающий преобразователь в нормальных режимах. Места установки автоматов показаны на рис.5.1. Автомат, установленный в цепи переменного тока преобразовательной установки (QF1), отключается как при внешних, так и при внутренних повреждениях. Автомат в цепи постоянного тока (QF2) отключается только при коротких замыканиях в нагрузке. Таблица 3 – Технические данные автоматических токоограничивающих выключателей
Выбор автомата QF1: Переменного тока, однополюсный,    где  – номинальное напряжение и ток автомата, – номинальное напряжение и ток автомата, – предельная коммутационная способность. – предельная коммутационная способность. , ,  , ,  – ударный коэффициент – ударный коэффициент , где , где     Этим требованиям удовлетворяет Legrand TX3 2P (C) 6kA 16 А, сравним данные: 380 В = 380 В 16 А ≥ 7.7 А 6 кА ≥ 0.285 кАВыбор автомата QF2: Постоянного тока, однополюсный,     Этим требованиям удовлетворяет IEK ВА 47-29 1P (C) 4,5kA 10 А, сравним данные: 220 В = 220 В 10 А ≥ 9.5 А 4.5 кА ≥ 1.02 кА7.2 Защита плавкими предохранителями Дополнительно с автоматами для защиты полупроводниковых приборов при внутренних и внешних коротких замыканиях в некоторых случаях применяются специальные плавкие предохранители различных типов. Наиболее часто применяются предохранители типа ПП57, которые имеют широкую гамму типоразмеров. Выбор предохранителя: Напряжение: UПР. Н ≥ UC = UСЛ = 380 В; Ток плавкой вставки:  Коммутационная способность: IПР. ОТКЛ ≥ IП2 =  А; А;Защищённость вентиля:  . .В качестве плавкого предохранителя был выбран ПП57-3127 с параметрами: Номинальный ток предохранителя: IПР.Н = 100 А; Номинальный ток плавкой вставки: IПЛ.Н = 25 А; Номинальное напряжение предохранителя: UПР.Н = 380 В; Предельный ток отключения: IПР. ОТКЛ = 120 кА; Тепловой эквивалент тока отключения:  . .7.3 Защита вентилей от перенапряжений. Переходные процессы в цепях вентильных преобразователей часто сопровождаются перенапряжениями, основными из которых являются: перенапряжения, обусловленные внутренними процессами в полупроводниковых приборах в моменты коммутации тока; коммутационные перенапряжения, возникающие в моменты отключения внешних цепей с индуктивностями и др. Перенапряжения могут привести к электрическому пробою приборов и короткому замыканию. Для снятия возникающих перенапряжений применяют RC–цепочки, включаемые параллельно вентилям. Необходимую емкость конденсатора в такой цепочке можно определить по формуле, Ф,  где  – напряжение короткого замыкания трансформатора; – напряжение короткого замыкания трансформатора;  – повторяющийся импульсный обратный ток и повторяющийся импульсный ток в закрытом состоянии, мА; – повторяющийся импульсный обратный ток и повторяющийся импульсный ток в закрытом состоянии, мА; – амплитудное значение прямого тока, А. – амплитудное значение прямого тока, А. Возьмем конденсатор K73-16 63, 1.5 мкФ. Сопротивление резистора выбирают из необходимости ограничения тока при разрядке конденсатора через открывающийся вентиль, особенно при больших углах регулирования. Если учесть, что ток, обеспечивающий нормальное развитие процесса включения тиристора, составляет 15…20 А, а конденсатор может зарядится до амплитуды напряжения источника питания, то  Из ряда Е24 выбираем резистор с сопротивлением: R = 22 Ом Мощность резистора в RC–цепочке рассчитывается по формуле, Вт,  где  – количество коммутаций в течении периода; – количество коммутаций в течении периода;  – амплитудное значение выпрямленного напряжения, В; 𝑇 – период, с. – амплитудное значение выпрямленного напряжения, В; 𝑇 – период, с. В схеме электрической принципиальной будем использовать резистор АН-25 25 Вт 22 Ом, 5%, Резистор силовой. Энергетические характеристики преобразователя. 8.1 Коэффициент полезного действия КПД (𝜂) преобразовательной установки определяется суммарными потерями в согласующем трансформаторе (𝛥𝑃𝑇), вентилях (𝛥𝑃𝑉𝐶), сглаживающем реакторе (𝛥𝑃𝐶𝑃), цепях управления, защитных цепочках, собственных нуждах (𝛥𝑃У):  , ,где  Потери в согласующем трансформаторе, Вт,  где  , ,  – потери холостого хода и короткого замыкания в трансформаторе, Вт; – потери холостого хода и короткого замыкания в трансформаторе, Вт; – коэффициент нагрузки трансформатора. – коэффициент нагрузки трансформатора.Суммарные потери мощности в вентилях определяются отдельно для диодов и тиристоров выпрямительной схемы, Вт,  где  , ,  – потери мощности в диоде, тиристоре; – потери мощности в диоде, тиристоре; , ,  – общее число диодов, тиристоров в схеме. – общее число диодов, тиристоров в схеме. Так как схема симметричная без нулевого диода, то  = =  . . Потери в отдельном вентиле рассчитываются по выражению:  Потери мощности в цепях управления, собственных нужд, защитных цепочках определяются приближенно в долях от номинальной мощности согласующего трансформатора, Вт,  Рассчитаем и построим кривые КПД в зависимости от тока нагрузки при  , ,  и и  углах регулирования, полученных из регулировочной характеристики. Токи нагрузки задавать: углах регулирования, полученных из регулировочной характеристики. Токи нагрузки задавать:  = 0,2; 0,4; 0,6; 0,8; 1,0; 1,2 = 0,2; 0,4; 0,6; 0,8; 1,0; 1,2  . Напряжение на нагрузке . Напряжение на нагрузке  определяется по внешней характеристике при принятых значениях угла регулирования 𝛼 и тока нагрузки . Результаты расчетов занесем в таблицу 4. определяется по внешней характеристике при принятых значениях угла регулирования 𝛼 и тока нагрузки . Результаты расчетов занесем в таблицу 4.Таблица 4 – Результаты расчетов для построения кривых КПД
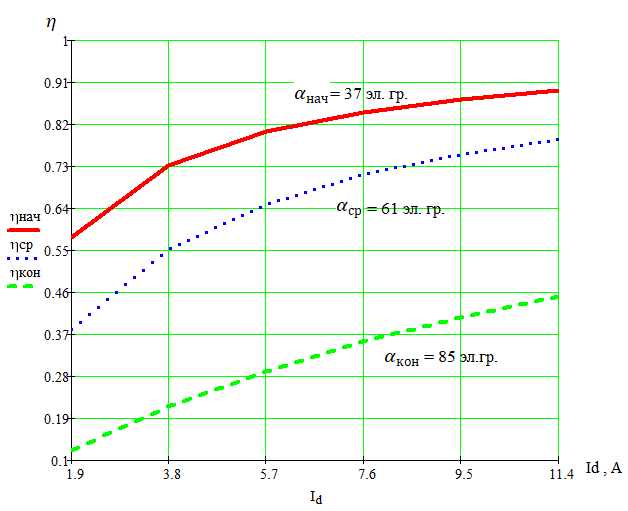 Рисунок 6 – Зависимость КПД от тока нагрузки при различных углах управления. С ростом угла управления среднее напряжение на нагрузке падает, следовательно, уменьшается скорость вращения двигателя постоянного тока и снижается КПД установки. 8.2 Коэффициент мощности Коэффициент мощности 𝜒 в общем случае может быть определен как отношение активной мощности, потребляемой из сети 𝑃, к полной мощности 𝑆:  , ,где 𝑄 – потребление реактивной мощности преобразователем. Активная мощность определяется мощностью, отдаваемой в нагрузку, и потерями мощности в элементах преобразователя:  Потребление реактивной мощности  преобразователем складывается из двух составляющих: преобразователем складывается из двух составляющих:  где  , ,  – потребление реактивной мощности согласующим трансформатором и вентильной схемой. – потребление реактивной мощности согласующим трансформатором и вентильной схемой.Для согласующего трансформатора потребление реактивной мощности определяется только величиной тока нагрузки преобразователя:  , ,где  – число фаз вторичной обмотки трансформатора, – число фаз вторичной обмотки трансформатора, – ток холостого тока трансформатора, %. – ток холостого тока трансформатора, %.Потребление реактивной мощности вентильной схемой может быть определено через ее коэффициент мощности  : : Для выпрямителя, как и для любой электрической установки с несинусоидальными токами, коэффициент мощности определяется произведением коэффициентов искажения 𝐾И и сдвига 𝑐𝑜𝑠(𝜑1) первичного преобразователя: Для трехфазной мостовой симметричной схемы  , а 𝑐𝑜𝑠(𝜑1) = 𝑐𝑜𝑠(𝛼) Рассчитаем и построим кривые коэффициентов мощности в зависимости от тока нагрузки при , и углах регулирования, полученных из регулировочной характеристики. Токи нагрузки задавать: = 0,2; 0,4; 0,6; 0,8; 1,0; 1,2 . Напряжение на нагрузке определяется по внешней характеристике при принятых углах регулирования 𝛼 и тока нагрузки .Результаты расчетов занесем в таблицу 9. , а 𝑐𝑜𝑠(𝜑1) = 𝑐𝑜𝑠(𝛼) Рассчитаем и построим кривые коэффициентов мощности в зависимости от тока нагрузки при , и углах регулирования, полученных из регулировочной характеристики. Токи нагрузки задавать: = 0,2; 0,4; 0,6; 0,8; 1,0; 1,2 . Напряжение на нагрузке определяется по внешней характеристике при принятых углах регулирования 𝛼 и тока нагрузки .Результаты расчетов занесем в таблицу 9.Таблица 5 – Результаты расчетов для построения кривых коэффициента мощности
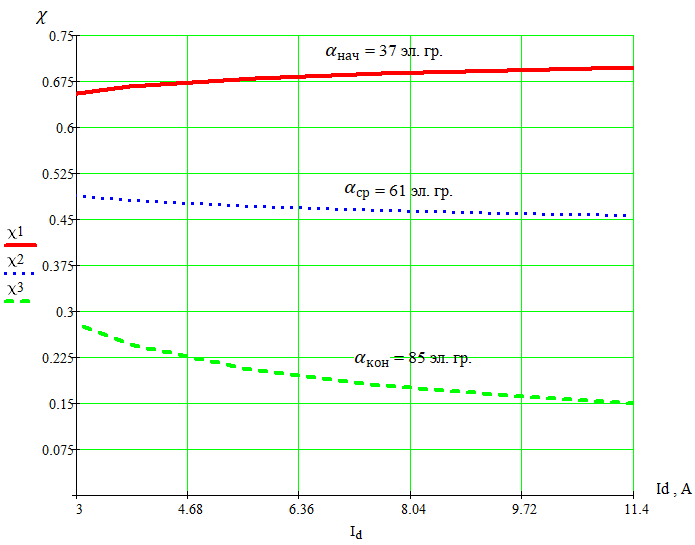 Рисунок 7 – Зависимость коэффициента мощности от тока нагрузки при различных углах управления Способы повышения коэффициента мощности: 1) Установка нулевого диода в цепь нагрузки; 2) Установка дополнительной емкости (конденсаторных батарей) на выходе трансформатора; 3) Установка полностью управляемых вентилей, например, двухоперационных тиристоров или транзисторов. Разработка системы управления преобразования 9.1 Определение параметров управляющих импульсов и схемы управления Для перевода тиристора из закрытого состояния в открытое на его управляющий электрод следует подать управляющий импульс тока определенного уровня, формы и длительности, и при этом не должна быть превышена допустимая мощность потерь на управляющем электроде. В большинстве случаев включение тиристоров осуществляется импульсами тока с крутым фронтом и достаточной амплитудой, при этом обеспечивается точное задание угла отпирания тиристора, симметрия тока в многофазной нагрузке, стойкость тиристоров к большим скоростям нарастания анодного тока. Требуемая длительность импульса управления зависит от времени задержки включения, схемы преобразовательной установки и характера нагрузки. 3а время протекания импульса должен быть достигнут ток включения тиристора с учетом индуктивности нагрузки. При расчете схемы управления определяют напряжение холостого хода UXX и внутреннее сопротивление RВН источника управления, при которых обеспечиваются требуемые параметры прямоугольного импульса. Необходимые величины определяются по вольтамперным характеристикам управляющего электрода (ВАХУ) тиристора. 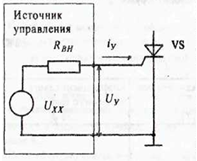 Рисунок 8 – Эквивалентная схема управления тиристором 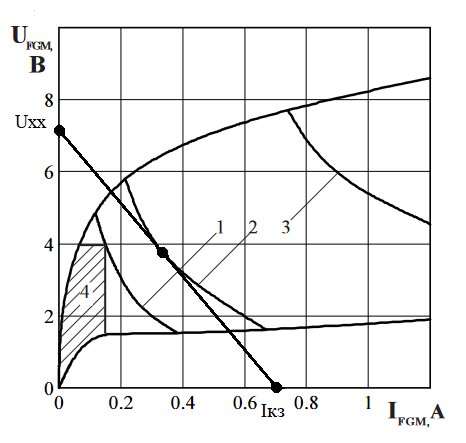 Рисунок 9 – Диаграмма управления тиристора. Таблица 6 – Предельно допустимые характеристики управляющего электрода
При работе преобразователя на активно-индуктивную нагрузку длительность управляющего импульса принимается из промежутка от 10 до 15 электрических градусов, причем 1 электрический градус равняется 55 мкс. Пусть длительность управляющего импульса  электрическим градусам, следовательно, электрическим градусам, следовательно,  мс. При расчете схемы управления определяют напряжение холостого хода мс. При расчете схемы управления определяют напряжение холостого хода  и внутреннее сопротивление и внутреннее сопротивление  источника управления, при которых обеспечиваются требуемые параметры прямоугольного импульса. Необходимые величины определим по вольт-амперным характеристикам управляющего электрода (ВАХУ) тиристора, приведенным в справочнике. источника управления, при которых обеспечиваются требуемые параметры прямоугольного импульса. Необходимые величины определим по вольт-амперным характеристикам управляющего электрода (ВАХУ) тиристора, приведенным в справочнике.  . .9.2 Разработка системы импульсно-фазного управления преобразователем Основой системы управления является микроконтроллер 1986ВЕ94Т. Принципиальная схема системы управления представлена в приложении В. Схема состоит из двух частей: схемы синхронизации с сетью и схемы управления вентилями. Схема синхронизации: для понижения сетевого напряжения используется один однофазный трансформатор ОСЗ-1,0 У2  и делители напряжения и делители напряжения  . Для выделения точек коммутации входное напряжение сравнивается на компараторах, например для определения точки коммутации вентиля VS1 напряжения фазы А должно быть больше 0. . Для выделения точек коммутации входное напряжение сравнивается на компараторах, например для определения точки коммутации вентиля VS1 напряжения фазы А должно быть больше 0.Если напряжение вторичной обмотки трансформатора равно 24 В, а входное напряжение на компараторе 4 В, то на вход каждого компаратора ставим делитель напряжения, который обеспечивает уменьшение диапазона входных напряжений до заданного диапазона. Коэффициент передачи делителя напряжения определяется из следующего соотношения:  Примем сопротивление  , тогда 𝑅5 = 5 ∙ 1000 = 5 кОм. Из ряда Е24 выбирается резистор номиналом 5.1 кОм. , тогда 𝑅5 = 5 ∙ 1000 = 5 кОм. Из ряда Е24 выбирается резистор номиналом 5.1 кОм. Импульсы с выхода компаратора подаются на вывод  микроконтроллера. За этой линией закреплена функция обработки внешнего прерывания. Таким образом, микроконтроллер будет «находить» точки коммутации напряжения для отсчета угла управления. В обработчике прерывания запускается таймер, отсчитывающий задержку, соответствующую углу управления. По переполнению таймера формируются управляющие импульсы длительностью 1 мс на выводах микроконтроллера. За этой линией закреплена функция обработки внешнего прерывания. Таким образом, микроконтроллер будет «находить» точки коммутации напряжения для отсчета угла управления. В обработчике прерывания запускается таймер, отсчитывающий задержку, соответствующую углу управления. По переполнению таймера формируются управляющие импульсы длительностью 1 мс на выводах  которые соответствуют вентилям 1-4. которые соответствуют вентилям 1-4.9.3. Схема управления ключами силового преобразователя Широкое распространение получили цифровые системы управления, для реализации такой системы будет использоваться 32-разрядный микроконтроллер 1986ВЕ94Т, на котором будут формироваться импульсы управления, усиливаться до необходимой мощности на транзисторах и через гальваническую развязку подаваться на управляющие электроды тиристоров VS1-VS4. Входом оптопары является светодиод, максимальный ток которого составляет 15мА. Микроконтроллер подает на светодиод уровень логической единицы. На вход оптопар устанавливаются токоограничивающие резисторы R1 – R4. Номинал резисторов рассчитывается следующим образом. Падение напряжения на светодиоде 1.3-1.5 В. Напряжение на выходе микроконтроллера 3.3 В.  Из ряда Е24 выбирается резистор номиналом 150 Ом. Выходом оптопары является фотоанзистор, который открывается при освещении светодиодом. На управляющий электрод тиристоров поступает ток, ограниченный резисторами. Максимальное напряжение управления тиристором  , а ток управления , а ток управления  . Сопротивление резисторов . Сопротивление резисторов  рассчитывается по формуле рассчитывается по формуле Из ряда Е24 выбираем резистор  . .Для управления вентилями силового преобразователя используются выводы микроконтроллера.По заданию в схеме необходимо реализовать торможение двигателя. В системах автоматического управления двигателем постоянного тока применяется рекуперативное торможение. Режим реверса двигателя постоянного тока Рекуперирующие преобразователи электроэнергии – это преобразователи, допускающие передачу мощности в обоих направлениях, т.е. от сети к электрической машине и обратно. Реверсивный преобразователь обеспечивает передачу мощности как за счёт изменения направления напряжения, так и за счёт изменения направления тока. Его структурная схема представлена на рисунке. Реверсивный преобразователь содержит два комплекта вентилей. Второй комплект предназначен для того, чтобы изменять направление тока. Мгновенно обеспечить реверс невозможно. 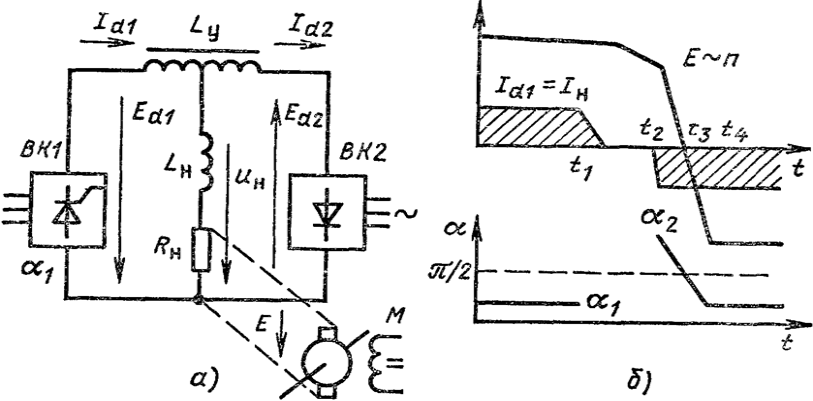 Рисунок 10 – Структурная схема двухкомплектного реверсивного преобразователя (а) и диаграммы токов, напряжения на нагрузке и углов управления при реверсе (б) В реверсивных управляемых выпрямителях используются два основных принципа управления комплектами выпрямителей: совместное и раздельное. Суть раздельного управления состоит в том, что импульсы управления подаются только на один из комплектов выпрямителей ВК1 или ВК2, который должен в данный момент проводить ток. На второй комплект импульсы не подаются – он «закрыт». Совместное управление предусматривает подачу импульсов управления от системы фазоимпульсного управления тиристорами (СИФУ) одновременно на тиристоры выпрямителей ВК1 и ВК2. При этом один из выпрямителей работает в выпрямительном режиме и проводит ток, а другой подготовлен для работы в инверторном режиме и ток не проводит. В нашем преобразователе применяется раздельное управление вентильными комплектами по перекрестному варианту реализации реверса. Реверс осуществляется при подаче сигналов с микроконтроллера. Чтобы произвести реверс, необходимо вначале произвести рекуперативное торможение (t1–t2): импульсы управления α1 снимаются, скорость вращения вала замедляется по инерции, а в момент t2 подаются управляющие импульсы α2. В результате второй комплект преобразователей работает в инверторном режиме, что переводит двигатель в генераторный режим. На участке t2–t3 в результате возникновения тормозного момента скорость вращения вала резко снижается до 0. В момент t3 угол управления α2 достигает граничного значения, а двигатель снова потребляет энергию из сети. С последующим снижением значения угла управления через второй преобразователь до минимального значения на интервале t3–t4 ток через нагрузку достигает номинального значения Iн. Таким образом, с переходом второго комплекта преобразователей в выпрямительный режим скорость вращения вала в обратном направлении возрастает до номинального значения. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||





























