Пояснительная записка к станку СФ_35. ПЗ-1. В настоящее время на промышленных предприятиях применяют несколько способов получения заготовок из металла
 Скачать 179.91 Kb. Скачать 179.91 Kb.
|

 Введение. В настоящее время на промышленных предприятиях применяют несколько способов получения заготовок из металла: 1) снятие слоя металла с заготовки; 2) дутьё под давлением; 3) штамповка. На большинстве предприятий используют метод снятия слоя металла на металлорежущих станках. Металлорежущие станки предназначены для механической обработки заготовок из металла режущими инструментами путём снятия стружки с заготовки, придавая ей требуемые форму, размеры и чистоту поверхности. Металлорежущие станки по количеству типов и потребляемой ими электроэнергии занимают одно из основных мест среди электрифицированных машин и агрегатов. Электрооборудование и автоматика станков оснащаются современными типами электроприводов и средствами автоматического управления, что обеспечивает высокую производительность и точность обработки, безопасность и удобства управления и обслуживания их. В соответствии с действующей документацией, в зависимости от характера выполняемых работ, вида применяемых инструментов и формы образуемой поверхности металлорежущие станки подразделяются на следующие группы: 1) токарные; 2) сверлильные и расточные; 3) шлифовальные; 4) комбинированные; 5) зубо- и резьбообрабатывающие; 6) фрезерные; 7) строгальные и долбёжные; 8) отрезные. Рассмотрим токарно-винторезный станок на 1М61П. Назначение станка. Токарно-винторезные станки модели 1М61П предназначены для выполнения разнообразных токарных работ в механических цехах в условиях мелкосерийного и единичного производства. Станок позволяет производить следующие виды токарных работ: проточку и расточку цилиндрических и конических поверхностей, подрезку торцов, отрезку, нарезание метрических резьб, дюймовой, модульной, питчевой, сверление и ряд других работ. Устройство станка. Основные узлы станка: 1 – станина, 2 - коробка скоростей, 3 - коробка передач, 4 - коробка подач, 5 – фартук, 6 – суппорт, 7 - задняя бабка, 8 – электрооборудование, 9 - защитный экран, 10 - система охлаждения. 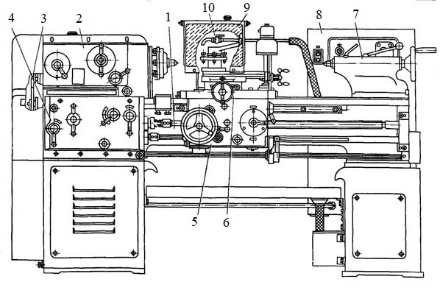 Принцип действия станка. Электродвигатель через клиноременную передачу передает движение на коробку скоростей, которая обеспечивает 24 скорости вращения шпинделя. Изменение скорости вращения шпинделя производится рукоятками 1 и 3. Коробка передач (гитара) служит для передачи движения от коробки скоростей коробке подач и для настройки подач на тип нарезаемой резьбы. При нарезании метрических и модульных резьб движение передается от вала через зубчатую муфту на ходовой винт. При нарезании дюймовых и питчевых резьб движение на ходовой винт передается через шестерни. Для более точных резьб ходовой винт имеет прямое включение, без механизма цепи подач. Это достигается соответствующей наладкой шестерен гитары, поставляемых по особому заказу. Установка величины резьбы осуществляется рукоятками 5. Установка типа резьбы, включение ходового винта или ходового валика производится при помощи рукоятки 4. Фартук передает движение суппорту от ходового винта или ходового валика. Подачи суппорта при обтачивании осуществляются исключительно при помощи ходового валика ходовой винт применяется только при нарезании резьбы. Для включения продольной подачи суппорта рукоятку 13 необходимо вытянуть на себя и затем повернуть вправо влево в зависимости от требуемого направления движения суппорта. Требования к электроприводу и системе управления станка. В станке предусмотрены следующие приводы: главный привод и привод подачи охлаждающей жидкости. К главному приводу предъявляются следующие требования, т.е. он должен: 1) обеспечивать различные режимы обработки: черновую, получистовую, чистовую; 2) быть реверсивным, т.к. на станке производятся операции по нарезанию резьбы; 3) обеспечивать точную и быструю остановку; 4) быть надёжным в эксплуатации и простым в обслуживании; 5) обеспечивать требуемую скорость обработки, а также её плавное регулирование. Регулирование частоты вращения двигателя главного привода производится переключением шестерён коробки скоростей при помощи рукоятки. В схеме предусмотрено электродинамическое торможение этого двигателя. Система управления предусматривает надёжную и безопасную работу на станке, т.к. она имеет все необходимые аппараты защиты и питается пониженным напряжением. Применение пониженного напряжения необходимо для обеспечения пожаробезопасности; оно подводится через трансформатор. В систему управления входят магнитные пускатели, реле, кнопки управления, выключатели и тепловые реле. К системе управления предъявляют следующие требования: 1) безопасность и удобство управления; 2) быстрота управления; 3) защита двигателей от длительных перегрузок. Расчет и выбор электродвигателей. 5.1 Расчёт мощности двигателя главного привода (М1). Процесс обработки деталей на токарных станках происходит при определённых значениях величин, характеризующих режим резания. Режимами резания являются: глубина резания t, подача S, скорость резания U. Назначаемая скорость резания зависит от свойств обрабатываемого материала, материала резца, вида обработки, условий охлаждения резца детали. Определяем необходимое значение скорости резания по формуле  (1) (1) где Cv – коэффициент, характеризующий свойства обрабатываемого материала, резца, а также вид токарной обработки; T – стойкость резца, мин; t – глубина резания, мм; S – подача, мм/об; Xv, Yv – показатели степени зависящие от свойств обрабатываемого материла, резца и вида обработки. Глубину резания устанавливают исходя из припуска на обработку. Так, как расчёт мощности двигателя производим при черновой обработке, глубина резания t = 5 мм. Для точения серого чугуна с твёрдостью 150НВ резцом при черновой обработке подача S = 0,23 мм/об. Принимаем подачу S=0,3 мм/об. Стойкость резца Т = 60 мин. Коэффициент и показатели степени также выбираем Cv=55; Xv=0,25; Yv=0,6; m=0,125.  Определяем усилие резания, преодолеваемое шпинделем станка по формуле:  (2) (2)где CF – коэффициент, характеризующий обрабатываемый материал, материал резца и вид токарной обработки; XF, YF, nF – показатели степени, зависящие от свойств обрабатываемого материала, резца и вида обработки. Выбираем коэффициент и показатели степени CF=200; XF=1,0; YF=0,75; nF=0  Определяем мощность резания по формуле  (3) (3) Определяем мощность на валу главного двигателя в установившемся режиме с учётом потерь в передачах по формуле  (4) (4)где  - КПД станка при данной мощности резания; - КПД станка при данной мощности резания; По произведённым расчётам, скорости и ближайшей мощности выбираем по таблице Д.1 (1) асинхронный двигатель с короткозамкнутым ротором серии АИР100L4. Данные данного двигателя приведены в таблице 1. 5.2 Расчёт мощности двигателя системы охлаждения (М2). В станке используется охлаждение режущего инструмента, для этого используется центробежный насос. В качестве охлаждающей жидкости используется СОЖ. В зону охлаждения жидкость подаётся под давлением, которое создаёт насос. Определяем мощность двигателя насоса по формуле:  (5) (5)где Рдв - мощность двигателя, кВт; ρ – плотность перекачиваемой жидкости, кг/м3; Q – производительность насоса, м/с; Н – статический напор, полная высота подачи жидкости, м;  - КПД насоса; - КПД насоса; - КПД передачи; - КПД передачи;Кз – коэффициент запаса;  . .Выбираем двигатель АИР50B2 исходя из расчётной мощности насоса из таблицы Д.1(1). Данные данного двигателя приведены в таблице 1. Таблица 1.
Описание принципиально электрической схемы токарно-винторезного станка модели 1М61П. Управление электродвигателем M1 главного привода осуществляется рукояткой управления путевыми выключателями SQ1 и SQ2, фиксируемой в трех положениях, в нейтральном положении рукоятки размыкающие контакты путевых выключателей SQ1 и SQ2 (10-1) замкнуты. Включением автоматического выключателя QF1 через размыкающие контакты SQ1 и SQ2 промежуточное реле KL1 получает питание и через свой замыкающий контакт переходит на самопитание. Замкнувшиеся силовые контакты реле KL1 подготавливают цепь электронасоса охлаждения. Получает питание также реле времени KT1. Размыкающий контакт реле KT с выдержкой времени 3-4 с отключает электромагнитную муфту торможения ЭМТ. Отключение электромагнитной муфты торможения в исходном положении необходимо для свободного проворота шпинделя. Пуск электродвигателя M1 в направлении в направлении "вперед". Для пуска электродвигателя M1 в направлении "вперед рукоятку 14 поворачивают вверх. При этом размыкается размыкающий контакт путевого выключателя SQ1 и замыкается замыкающий контакт SQ1, срабатывает контактор KM1 и включает электродвигатель M1 на вращение "вперед". Размыкающий контакт KM1 размыкается, обесточивается реле времени KT1, размыкая замыкающий контакт KT1 и замыкая размыкающий контакт KT1. Отключение электродвигателя M1 производится переводом рукоятки 14 в нейтральное положение. При этом размыкается нормально разомкнутый контакт SQ1 и замыкается нормально замкнутый контакт SQ1. Контактор KM1 обесточивается, реле времени KT1 через контакт KM1 получает питание и замыкает свой замыкающий контакт KT1. Срабатывает электромагнитная муфта ЭМТ, получая постоянный ток от селенового выпрямителя VD, и затормаживает механизм коробки скоростей и шпиндель. Несколько позже, с выдержкой времени 3-4 с, размыкается размыкающий контакт KT1, электромагнитная муфта отключается и система возвращается в исходное положение. Пуск электродвигателя M1 в направлении "назад" производится переводом рукоятки 14 в нижнее положение. Работа электросхемы аналогична работе при пуске электродвигателя М1 в направлении "вперед", только в этом случае срабатывает контактор KM2. Электронасос охлаждения М2 включается и выключается выключателем QF2 и пускателем KL1. Расчет и выбор аппаратов защиты и управления. Аппараты управления предназначены для включения, отключения и переключения электрических цепей и электроприёмников, регулирования частоты вращения и реверсирования электродвигателей, регулирования параметров силовых, осветительных, нагревательных и других электроустановок. Аппараты защиты предназначены для того, чтобы при возникновении аварийных режимов в работе электроприемников или электрических сетей автоматически отключить защищаемую электрическую цепь. От правильного выбора аппаратуры защиты и управления в большей мере зависят надёжность работы и сохранность оборудования в целом, численные, качественные и экономические показатели производственного процесса и электробезопасности людей. 7.1. Расчёт местного освещения. Местное освещение даёт возможность создать значительную освещённость рабочего места при небольшой мощности ламп, а так же получить наиболее благоприятное направление световых лучей на рабочую поверхность. Так как обработка детали требует постоянной освещённости, при неизменном направлении светового потока, то светильник должен быть закреплён неподвижно на кронштейнах. На станке обрабатываются детали с точностью до 1мм, для этого используется светильник типа НБ, который установлен на кронштейне высотой 0,4м. и на расстоянии над обрабатываемой деталью 0,2м. 1) По справочнику [1], выбираем наименьшую освещённость (  ) при комбинированном освещении лампой накаливания. ) при комбинированном освещении лампой накаливания.  = 300лк, лампа местного освещения должна давать освещённость 300лк. = 300лк, лампа местного освещения должна давать освещённость 300лк.2) Из справочника [1], по кривым равной освещённости, для светильника НБ, при установке светильника на заданной высоте h и расстоянии от обрабатываемой детали d, относительная освещённость e = 500лк. 3) Определяем необходимый световой поток лампы, лм.  , (6) , (6)где Fл – световой поток, лм; Ен – освещённость, лк; е – относительная освещённость, лк.  лм лм 4) По справочнику [8], выбираем светильник, предназначенный для освещения токарных станков, светильник типа НКСО1, рассчитанный на напряжение не более 24В. По найденному световому потоку, подбираем ближайшую по мощности лампу местного света, по справочнику [8]. Выбираем лампу накаливания со световым потоком 950лм марки М0Д24 – 60, U=24В, Р=60Вт. 5) Определяем ток, который потребляет лампа.  , (7) , (7) где Р- мощность, Вт; U- напряжение, В.  7.2. Расчёт и выбор магнитных пускателей КМ1-КМ2. Данные аппараты находятся в силовой цепи двигателя М1 мощностью 4 кВт. 1) Определяем длительный ток в линии двигателя.  , (8) , (8)где Iдл – длительный ток, А; Рд – мощность двигателя, кВт; Uн – номинальное напряжение электродвигателя, В; ηд – КПД двигателя; cosφ – коэффициент мощности.  2) Выбираем провод для линии. Выбираем по длительному току двигателя: Iдоп≥Кзщ∙Iдл, (9) где Iдоп – допустимый ток, А; Кзщ – коэффициент защиты (для нормальных (неопасных) помещений Кзщ=1). Iдоп≥1∙8,5 А Iдоп≥8,5 А По справочнику [2] выбираем провод марки ВРГ в поливинилхлоридной оболочке с медными жилами. Провод проложен открыто. S=0,5 мм2 Iдп=11А Проверяем выбранный провод с учётом длительного тока нагрузки, т.е. должно выполняться условие: Iдп≥Iдоп, (10) где Iдп – допустимый ток провода, А. 11>8,5 А Т.к условие выполняется, то провод выбран правильно. 3) Выбираем магнитные пускатели КМ1-КМ2. Т.к. магнитные пускатели КМ1-КМ2 предназначены для управления этим двигателем, то расчёт сводим только к одному, например, рассчитаем магнитный пускатель КМ1, а КМ2 возьмём такой же марки. Рдв=4 кВт По справочнику [2] выбираем ближайший по мощности магнитный пускатель марки ПМЕ-213, у которого катушка рассчитана на напряжение 380В при токе Iкм1=0,524 А. 7.3. Расчёт и выбор автоматического выключателя QF2, предохранителя FU1 и теплового реле КК2. Данные аппараты находятся в силовой цепи двигателя М2 мощностью 0.12 кВт. 1) Определяем длительный ток в линии (по формуле 8).  А А2) Выбираем тепловое реле КК1. Iтр≥1,25∙Iдл (11) Iтр≥1,25∙0,38 Iтр≥0,48 А По справочнику [2] выбираем тепловое реле, которое устанавливается независимо от магнитного пускателя: ТРН-10, Iном=3,2А, Iн.теп.эл.=0,63А 3) Выбираем предохранитель FU1 для цепи двигателя системы охлаждения. Должно выполнятся условие: Iпуск=4,5∙Iном, Iпуск=4,5∙0,38, Iпуск=1,71 А Iвс ≥  , ,Iвс≥1,06 A, По справочнику [2] выбираем плавкий предохранитель марки ПРС-6-П Iн.п=10А; Iп.в=6А; Iпред.откл= 1кА 4) Выбираем провод для линии (по формуле 9). Iдоп≥1∙0,38 Iдоп≥0,38 А По справочнику [2] выбираем провод марки ВРГ в поливинилхлоридной оболочке с медными жилами. Провод проложен открыто. S=0,5 мм2 Iдп=11А Проверяем выбранный провод с учётом длительного тока нагрузки (по формуле 8). 11>0,5 А Т.к условие выполняется, то провод выбран правильно. 5) Выбираем автоматический выключатель QF2. Этот автоматический выключатель подаёт напряжение на двигатель и защищает его от коротких замыканий. а) Определяем номинальный ток расцепителя для линии с одним электродвигателем. Iнр≥1,25∙Iдл, (12) где Iнр – номинальный ток расцепителя, А; Iдл – длительный ток в линии двигателя М2, А. Iнр≥1,25∙0,12 Iнр≥0,5 А По справочнику [2] выбираем автоматический выключатель марки ВА51-25. Iнр=0,6А, Iпред.откл.=2 кА, Iном.авт=25А. б) Проверяем выбранный автоматический выключатель по уставке тока мгновенного срабатывания электромагнитного расцепителя. Т.к. двигатель М2 асинхронный с КЗ ротором, то Iу.э.=К∙Iп, (13) где Iу.э. – ток уставки электромагнита, А; К – коэффициент, учитывающий разброс параметров и неточность определения тока двигателя (К=1,51,8); Iп – пусковой ток двигателя, А. Iп=Кп∙Iн.д, (14) где Кп – пусковой коэффициент; Iн.д – номинальный ток двигателя, А. Iп = 6,5∙0,38=2,47 А Iу.э.=1,5∙2,47=3,71 А Iу.э. = (712)∙ Iнр=7∙0,6=4,2 А 4,23,71 А Также должно выполняться условие: Iн.а.≥Iн.р., (15) где Iн.а. – номинальный ток автоматического выключателя, А. 250,6 А Т.к. все условия выполняются, то автоматический выключатель выбран правильно. 7.4. Расчёт и выбор аппаратуры цепи управления. Цепь управления питается переменным напряжением 110В. 1) Выбираем реле времени КТ1. Реле времени выбираем по номинальному напряжению катушки реле и числу контактов. Выбираем реле времени типа РВП-3121, у которого катушка рассчитана на напряжение U=380В при токе Iкт1=0,4А. 2) Выбираем промежуточное реле КЛ1. Промежуточное реле выбираем по номинальному напряжению катушки реле и числу контактов. Выбираем промежуточное реле типа РПЛ-140, у которого катушка рассчитана на напряжение U=380В при токе Iкл1=0,6А. 3) Определяем ток, протекающий в цепи управления по максимальному числу одновременно работающих аппаратов цепи управления. Одновременно могут работать следующие аппараты: магнитные пускатели КМ1-КМ2, промежуточное реле КЛ1, а также реле времени КТ1. Iмакс=Iкм1+Iкм2+Iкл1+Iкт1, (16) где Iкм1 – ток, потребляемый катушкой КМ1, А; Iкм2 – ток, потребляемый катушкой КМ2, А; Iкл1 – ток, потребляемый катушкой КЛ1, А; Iкт1 – ток, потребляемый катушкой КТ1, А. Iмакс=0,524+0,524+0,4+0,6=2,1 А 4) Выбираем провода, подводящие питание к цепи управление. Для цепи управления выбираем провода одной марки и сечения, что упрощает устранение возможных неисправностей. Выбираем провода по току протекающему в цепи управления: Iдоп≥Iц.у (17) Iдоп≥2,1 Iдоп≥2,1 А По справочнику [2] выбираем провод марки ВРГ в поливинилхлоридной оболочке с медными жилами. Провод проложен открыто. S=0,5 мм2 Iдп=11А Проверяем выбранный провод с учётом длительного тока нагрузки (по формуле 8). 11>2,1 А Т.к условие выполняется, то провод выбран правильно. 5) Выбираем провод, подводящий питание к лампе местного освещения. Провод выбираем по току протекающему в цепи освещения (по формуле 9) Iдоп≥2,4 Iдоп≥2,4 А По справочнику [2] выбираем провод марки ВРГ в поливинилхлоридной оболочке с медными жилами. Провод проложен открыто. S=0,5 мм2 Iдп=11А Проверяем выбранный провод с учётом длительного тока нагрузки (по формуле 8). 11>6 А Т.к условие выполняется, то провод выбран правильно. 6) Выбираем переключатели. Переключатель QW, с помощью которого включается лампа местного освещения, выбираем по напряжению: ПЕ-011-У3. 7) Выбираем концевые выключатели ВПК-2110 (SQ1-вперед, SQ2-назад) (Uном=660В, Iном=10А). 7.5. Расчет и выбор электромагнитной муфты YA. диодов VD1-VD4. Выбор муфты осуществляется исходя из условия: Ммуфты>Мр∙Кз.д , (18) где Ммуфты - момент муфты; Мр – момент инерции ротора, Н∙м; Кз.д - коэффициент запаса (1,6) Мр известен из расчета двигателя = 0,011 Н∙м, Ммуфты>0,011∙1,6=0,0176 Н∙м, По таблице [2] выбираем электромагнитную муфту ЭТМ 076-2А; U=24В; Мном=40 Н∙м; Iном =0,7 А; Р=17,6 Вт. Выбираем диоды VD1-VD4. По току и напряжению в линии муфты выбираем диоды марок 2Д222ТС. Iном=6А; Iпр=3А; Uобр=40В. Проверяем выбранные диоды по следующим условиям: Iпр>Iном, (19) Uобр>Uc (20) где Iпр – прямой ток диода, А; Iном – номинальный ток муфты, А; Uобр – обратное напряжение диода, В; Uc –напряжение сети, В. 3>0,7А, 40>24В Т.к оба условия выполняются, то диоды выбраны правильно. 3) Выбираем провод, подводящий питание к электромагниту быстрого хода. Iдоп ≥Iэм (21) Iдоп ≥0,7А По справочнику [7] выбираем провод марки ВРГ в поливинилхлоридной оболочке с медными жилами. Провод проложен открыто. S=0,5мм Iдп =11А Проверяем выбранный провод с учетом длительного тока нагрузки (по формуле 8). 11>1А Т.к условие выполняется, то провод выбран правильно. 7.6. Расчёт и выбор трансформатора Тр1. Данный трансформатор является однофазным трёхобмоточным: напряжение вторичных обмоток 24 и 36В. 1) Определяем токи, протекающие по вторичным обмоткам. Iэм =Iэм , (22) Где Iэм – ток, потребляемый электромагнитной муфтой торможения, А; Iм.о.=IEL1, (23) где Iм.о. – ток, протекающий в цепи лампы местного освещения, А; IEL1 – ток, потребляемый лампой местного освещения, А. Iм.о.=2,4 А 2) Определяем мощность вторичной обмотки трансформатора, Вт. Р2=3∙U2∙Iм.о∙cosφ+3∙U3∙Iэм∙cosφ, (24) где U1 – напряжение, питающее цепь лампы местного освещения, В; U2 – напряжение, питающее цепь электромагнитной муфты торможения, В. Р2=3∙24∙2,4∙0,8+3∙24∙0,7∙0,8=103,1 Вт 3) Определяем мощность первичной обмотки трансформатора, Вт.  , (25) , (25)где η – КПД (по справочнику [7] η=6070%).  Вт Вт4) Определяем ток первичной обмотки трансформатора, А.  , (26) , (26) А АПо справочнику [2] выбираем ближайший по мощности трансформатор типа ТБСЗ-0,16 380/36/24 В. 7.7. Расчёт и выбор вводного автоматического выключателя QF1. Выбираем автоматический выключатель. Этот автоматический выключатель подаёт напряжение на двигатели и трансформаторы, а также защищает их от коротких замыканий и перегрузок. Iтр=0,3 А Iпуск=Iном∙K1,(27) IпускМ1=8,5  7=59,5 А 7=59,5 АIраб=59,5+0,3=59,3 А Автоматический выключатель выбираем согласно условию: Iнр≥1.1∙Iраб, Iнр≥1.1∙59,3А Iнр≥65,23А По каталогу IEK выбираем автоматический выключатель марки ВА88-32 Iнр=100 А, Iном.авт=250А. 250>100А Т.к. все условия выполняются, то автоматический выключатель выбран правильно. Заключение В ходе курсового проектирования выполнены проверочные расчёты мощности двигателей. Выбрана аппаратура управления и защиты: автоматический выключатель, тепловые реле, предохранители, магнитные пускатели, концевые переключатели. Двигатели и аппаратура управления выбранная для двигателей, которые выпускаются промышленностью в настоящее время. Устаревшие двигатели заменены на новые двигатели, аппаратура управления и защиты заменены на новую аппаратуру более современных моделей с целью облегчения её замены в случае выхода из строя. Таким образом, в ходе курсового проектирования произведена модернизация токарно-винторезного станка 1М61П. Список литературы. 1. Электротехнический справочник том 3 кн. 2под редакцией В.Г. Герасимова, М., Энергоиздат, 1982 г. 2. Алиев А.Н. «Справочник по электротехническому и электрическому оборудованию». Москва «Высшая школа» 2000г. 3. Липкип Б.Ю. «Электроснабжение промышленных предприятий и установок». Москва «Высшая школа» 1990г. 4. Зимин Е.Н. и др. «Электрооборудование промышленных предприятий и установок» - М: Энергоиздат, 1981г. 5. Чернов Н.Н. «Металлорежущие станки», 4 изд-е, - М.: Машиностроение, 1987г. 6. Справочник технолога-машиностроителя, Ю.А. Абрамов, В.Н. Андреев, Б.И. Горбунов и др. Под ред. А.Г. Косиловой и Р.К. Мещерякова, - М.: Машиностроение, 1985г. 7. Справочник по электрическим машинам под ред. И.П. Копылова и Б.К. Клюкова, - М.: Энергоиздат, 1988г. 8. Касаримов Р.А. «Справочник электрика», - М.: Энергоиздат, 1997г.    Лист
|
